

2.3 Временные характеристики систем автоматического управления
Другими важными характеристиками САУ (звеньев) являются переходные и весовые (импульсные переходные) функции и их графики – временные характеристики.
2.3.1 Переходная функция динамического звена
Переходная функция динамического звена h(t) есть функция, описывающая реакцию звена на единичное ступенчатое воздействие 1(t) при нулевых начальных условиях (рис. 2.38, 2.39).

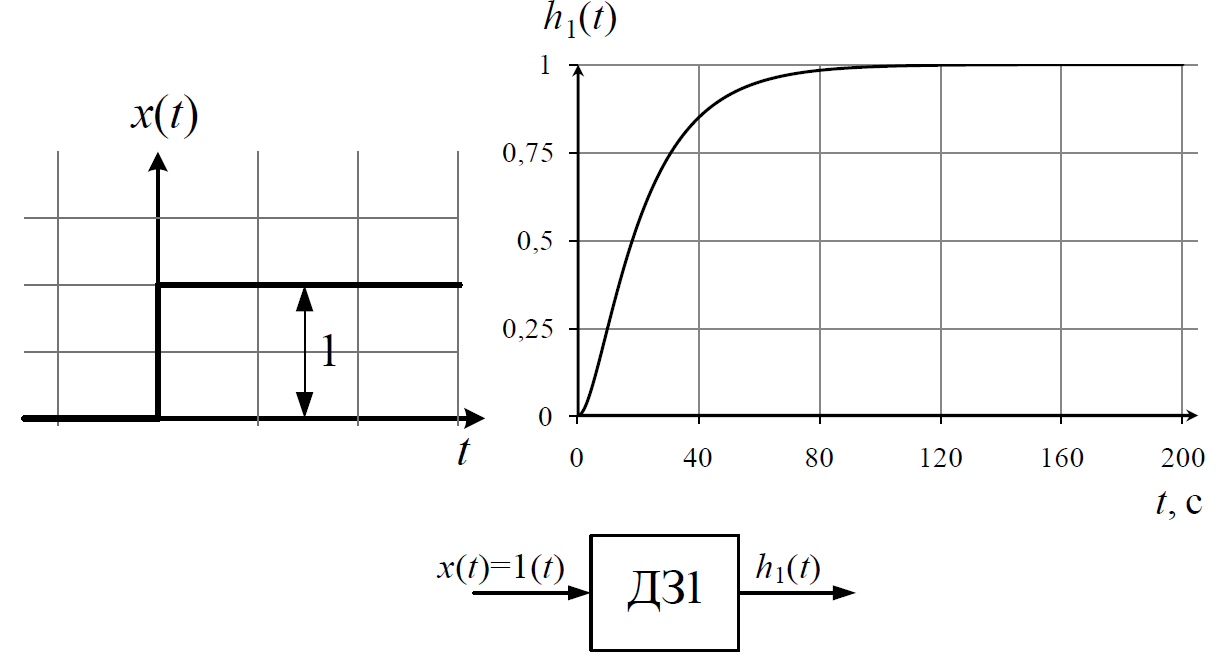
Рис. 2.38. Иллюстрация реакции ДЗ1 на единичное ступенчатое воздействие

Рис. 2.39. Иллюстрация реакции ДЗ2 на единичное ступенчатое воздействие
2.3.2 Весовая функция динамического звена
Весовой или импульсной переходной функцией w(t) называют функцию, описывающую реакцию динамического звена (системы) на идеальное импульсное воздействие δ(t) при нулевых начальных условиях (рис. 2.40, 2.41).
Математически идеальное импульсное воздействие описывается дельта-функцией δ(t):


Рис. 2.40. Иллюстрация реакции ДЗ1 на идеальное импульсное воздействие
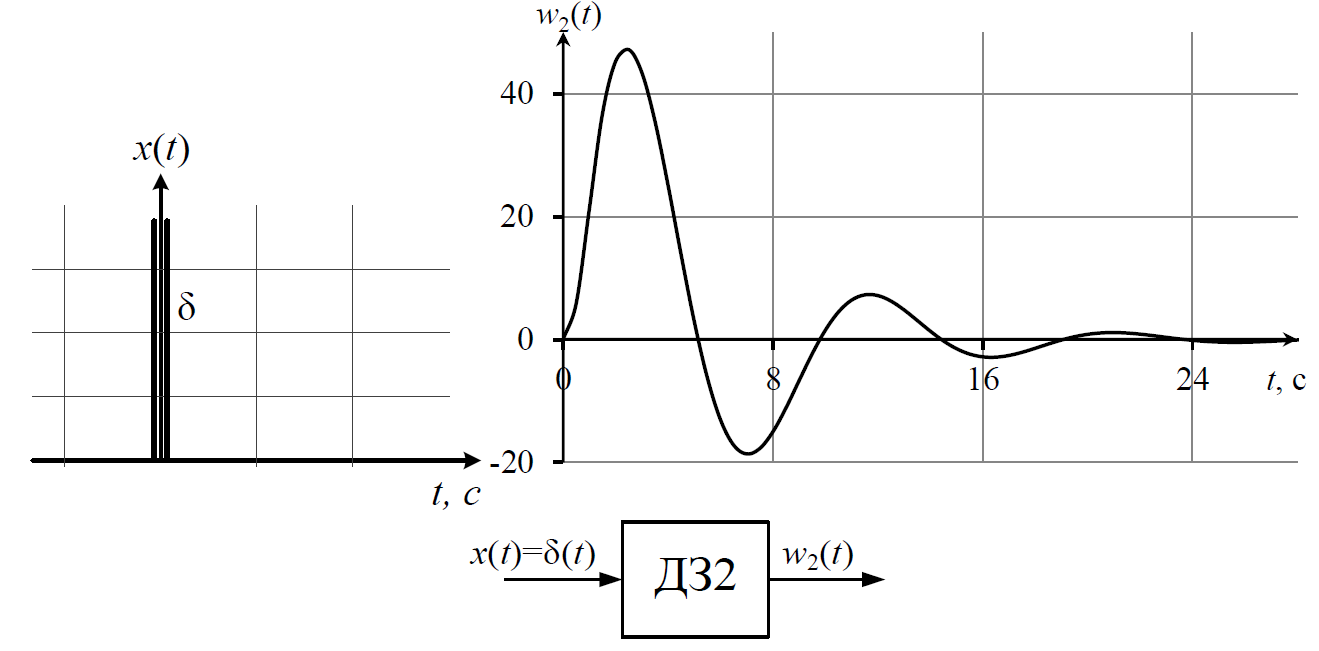
Рис. 2.41. Иллюстрация реакции ДЗ2 на идеальное импульсное воздействие
Экспериментальные временные характеристики сау
Экспериментально снятые временные характеристики широко используются для идентификации объектов управления. По виду переходной (либо весовой) функции определяют тип звена, а по специальным методикам рассчитывают параметры уравнения (передаточной функции) этого звена.
 Так для переходной функции технологического
объекта управления (ТОУ), изображенной
на рис. 2.42, можно предположить, что ТОУ
описывается дифференциальным уравнением
Так для переходной функции технологического
объекта управления (ТОУ), изображенной
на рис. 2.42, можно предположить, что ТОУ
описывается дифференциальным уравнением

или передаточной функцией


Рис. 2.42. Экспериментальная переходная функция технологического объекта управления
Последовательность определения параметров звена (Tоб, τоб, kоб) по методу Орманса такова:
1) по экспериментальной переходной функции (кривой разгона), представленной на рис. 2.42, определяется время t0,7 при y(t0,7) = y(0) + 0,7Δy(∞) и t0,33 при y(t0,33) = y(0) + 0,33Δy(∞);
2) вычисляется время запаздывания τоб по формуле:

3) вычисляется величина постоянной времени Tоб:

4) коэффициент передачи звена kоб находится из выражения:

2.4 Частотные характеристики систем автоматического управления
2.4.1 Частотные характеристики динамического звена
Наряду с вышеперечисленными способами математического описания (дифференциальные уравнения, передаточные функции, временные характеристики) динамических звеньев и систем автоматического управления в целом в теории автоматического управления для математического описания звеньев и систем широко применяются также частотные характеристики, которые определяют поведение отдельных звеньев и системы в целом при действии на их входе гармонических колебаний.
Частотными характеристиками называются формулы и графики, характеризующие реакцию звена на синусоидальное входное воздействие в установившемся режиме (т. е. вынужденные синусоидальные колебания звена).
Известно,
что гармонические колебания
 (A –
амплитуда; φ
– фаза; ω
– частота
колебаний) описываются периодической
функцией времени , где T
= 2π/ω – период
колебаний; n
– любое
целое число.
(A –
амплитуда; φ
– фаза; ω
– частота
колебаний) описываются периодической
функцией времени , где T
= 2π/ω – период
колебаний; n
– любое
целое число.
Отличительной особенностью периодических функций является то, что они существуют на бесконечном отрезке времени от t = –∞ до t = +∞.
В линейной САУ установившиеся колебания выходной величины, вызванные гармоническими воздействиями на входе, являются гармоническими колебаниями той же частоты, но амплитуда и фаза их будут уже другими.

Запишем гармонические функции входа и выхода динамического звена в символической (комплексной) форме:


И взяв их отношение, получим:
 (2.51)
(2.51)
При
изменении частоты от 0 до +∞ получаем
комплексную функцию частоты W(jω),
которая называется амплитудно-фазовой
частотной характеристикой динамического
звена. Ее модуль
 определяет отношение амплитуд выходных
и входных колебаний при изменении
частоты ω от 0 до +∞. Эта зависимость
отношения амплитуд выходных и входных
гармонических сигналов от частоты
называется (АЧХ) динамического звена
(рис. 2.43).
определяет отношение амплитуд выходных
и входных колебаний при изменении
частоты ω от 0 до +∞. Эта зависимость
отношения амплитуд выходных и входных
гармонических сигналов от частоты
называется (АЧХ) динамического звена
(рис. 2.43).
 (2.52)
(2.52)

Рис. 2.43.Амплитудно-частотная характеристика динамического звена
Аргумент φвых(ω) – φвх(ω) выражения (2.51) определяет разность фаз выходных и входных колебаний. Зависимость разности фаз выходных и входных гармонических сигналов от частоты называется фазо-частотной характеристикой (ФЧХ) динамического звена (рис. 2.44).


Рис. 2.44. Фазочастотная характеристика динамического звена
Представление АФЧХ на комплексной плоскости
Комплексная функция частоты
 (2.54)
(2.54)
называется амплитудно-фазовой частотной характеристикой – АФЧХ динамического звена Ее модуль есть АЧХ, а аргумент – ФЧХ. На комплексной плоскости величина изображается вектором, длина которого равна отношению амплитуд, а угол – разности фаз выхода и входа.

Рис. 2.45. Изображение на комплексной плоскости величины АФЧХ
для определенного значения частоты ω1
Соответственно на комплексной плоскости
АФЧХ представляется кривой – годографом,
которую вычерчивает конец вектора
 при измененииω от 0 до +∞.
при измененииω от 0 до +∞.
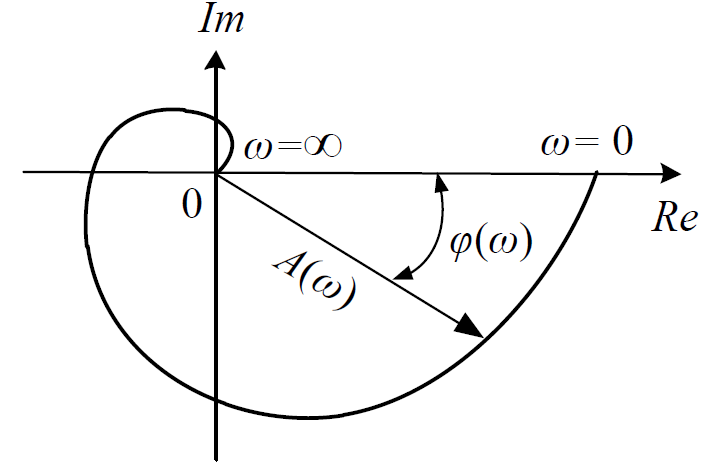
Рис. 2.46. Амплитудно-фазовая частотная характеристика динамического звена