

ТАУ
В основе построения систем автоматического управления (регулирования) лежат некоторые фундаментальные принципы управления (регулирования), определяющие каким образом осуществляется увязка алгоритмов функционирования и управления (регулирования).
В настоящее время в технике известны и используются три фундаментальных принципа управления (регулирования):
– принцип разомкнутого управления (регулирования);
– принцип компенсации возмущений – управление (регулирование) по возмущению;
– принцип обратной связи – управление (регулирование) по отклонению.
1.5.1 Принцип разомкнутого управления
Сущность принципа состоит в том, что алгоритм управления вырабатывается только на основе заданного алгоритма функционирования и не контролируется другими факторами – фактическим значением управляемой величины или величиной возмущения. Общая функциональная схема системы представлена на рис. 1.10.
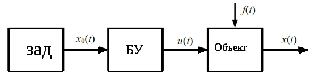
Рис. 1.10. Функциональная схема разомкнутого управления:
ЗАД – задатчик алгоритма функционирования; БУ – блок управления
Схема управления имеет вид разомкнутой цепи, это и дало основаниеназвнию принципа. Близость х кх0 обеспечивается жесткостью характеристик схемы. При наличии значительных возмущающих воздействийf величинаx может заметно отклоняться от заданной, при этом управление станет непригодным и следует использовать другие принципы управления. Несмотря на очевидные недостатки, этот принцип используется очень широко.
Схема управления имеет вид разомкнутой цепи, это и дало основание названию принципа. Близость х к х0 обеспечивается жесткостью характеристик схемы. При наличии значительных возмущающих воздействий f величина x может заметно отклоняться от заданной, при этом управление станет непригодным и следует использовать другие принципы управления. Несмотря на очевидные недостатки, этот принцип используется очень широко.
1.5.2 Принцип компенсации возмущений (управление по возмущению)
Для повышения точности управления можно, измерив возмущения, ввести по результатам измерения коррективы в алгоритм управления, которые компенсировали бы вызываемые возмущениями отклонения алгоритма функционирования. На рис. 1.12 изображена функциональная схема системы управления по возмущению.
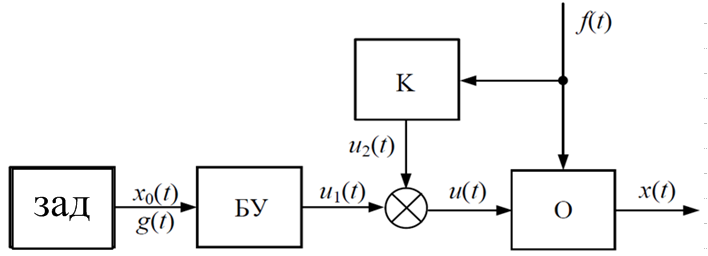
Рис. 1.12.Функциональная схема системы управления по возмущению
О – объект; К – компенсирующее устройство
Цепь, по которой осуществляется управляющее воздействие в функции возмущения, называют компенсирующей цепью. При наличии нескольких возмущающих воздействий управляющее устройство (регулятор) должен иметь компенсирующие цепи по каждому из этих возмущений, чтобы обеспечить поддержание выходной переменной на заданном уровне. Но при этом усложнится конструкция управляющего устройства (регулятора) и потребуется большое количество разнообразных элементов.
Системы управления (регулирования) по возмущению в сравнении с системами, действующими по отклонению, отличаются обычно бόльшими устойчивостью и быстродействием. К их недостаткам относятся трудность измерения возмущений, неполный учет возмущений.
1.5.3 Принцип обратной связи. Управление по отклонению
Систему можно построить так, чтобы точность выполнения алгоритма функционирования обеспечивалась и без измерения возмущений. В этом случае коррективы в алгоритм управления вносятся по фактическому значению регулируемой величины. На рис. 1.14 изображена функциональная схема системы управления по отклонению. Управляющее устройство РО Объект

Рис. 1.14. Функциональная схема системы управления по отклонению
Схема имеет вид замкнутой цепи, что дало основание назвать осуществляемый в ней принцип принципом управления по замкнутому контуру. Так как направление передачи воздействий в дополнительной связи обратно направлению передачи основного воздействия на объект эту цепь называют цепью обратной связи.
В соответствии с этим принципом воздействие на регулирующий орган объекта (РО) вырабатывается как функция отклонения ɛ(t) управляемой величины х(t) от уставки g(t):
 r(t)
= F
(ε):
r(t)
= F
(ε):
ɛ(t) = g(t) – х(t). (1.3)
Функция F(ɛ) должна быть не убывающей функцией ɛ(t) и быть одного с ɛ знака. Кроме ɛ аргументами F могут быть также производные и интегралы ɛ по времени.
Управление (регулирование) в функции отклонения при упомянутых требованиях к функции F(ɛ) называется управлением (регулированием) по отклонению.
Управляющее устройство в этом случае называется автоматическим регулятором. Обратная связь, образуемая регулятором, называется главной обратной связью. Могут быть и местные обратные связи.
Наиболее эффективными являются системы автоматического управления, реализующие совместно и принцип обратной связи (управление по отклонению) и принцип компенсации возмущений (управление по возмущению), т. н. комбинированные САУ (САР). На рис. 1.16 приведена функциональная схема такой системы.
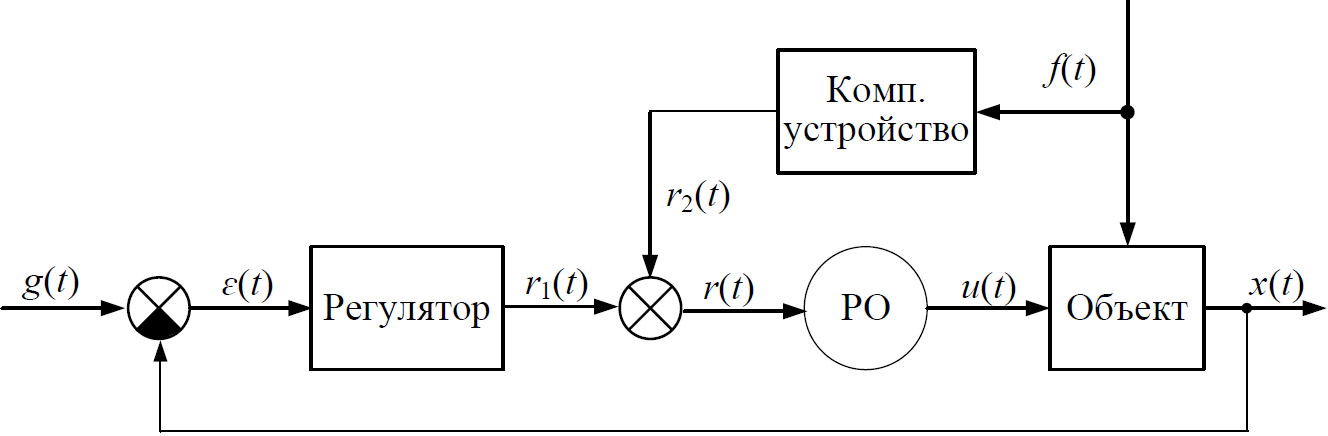
Рис. 1.16.Функциональная схема комбинированной САУ