

ответы_к_билетам_комаров_2018
.pdfЕсли период наблюдаемого сигнала кратен частоте ГР, то видим стационарную картинку. Для компенсации времени сдвига используется ЛЗ.
Ждущая и автоматическая синхронизация: в режиме ждущей ГР запускается только одновременно с приходом наблюдаемого сигнала.
Закрытый вход – проходит только переменная составляющая, Открытый – постоянная тоже.

29. Цифровые приборы. Общие сведения классификация.
Это устройства, автоматически вырабатывающие дискретные сигналы цифровой информации и показания представляются в цифровом виде.
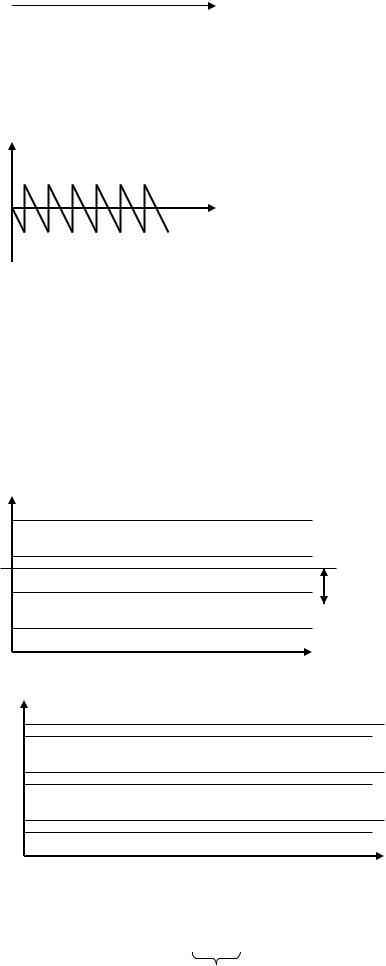
Вырабатывает цифровой код в соответствии с измеряемой величиной, при этом непрерывная аналоговая величина квантуется по уровню и дискретизируется во времени.
Дискретизация во времени – преобразование, при котором значение величины отличается от 0 и совпадает с соответствующим значением измеряемой величины только в определенные моменты времени. Промежутки между этими значениями – шаг дискретизации. t=ti+1 – ti (чаще const, иногда var) Квантование по уровню – преобразование, при котором непрерывная аналоговая величина принимает фиксированные, квантованные значения. Эти значения – уровни квантования или кванты. x(ti)=xk(ti)=Nq
– шаг квантования на количество уровней квантования.
x(t) |
дискретизация по времени |
x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
xk5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xk4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
xk3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
xk(ti) |
t- const |
xk2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
xk1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t) |
|
|
|
|
|
|
|
|
q |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||
t1 t2 t3 t4 |
t5 t6t |
t |
|
t1 t2 t3 t4 t5 t6 t7 |
|||||||||||||
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Важной характеристикой является правило отождествления измеряемой величины и уровней квантования.
Классификация ЦИУ.
По способу преобразования:
1)последовательного счета
2)последовательного приближения
3)считывания
По виду измеряемой величины
1)Вольтметры
2)Амперметры и т.д.
По способу усреднения измеряемой величины:
1)мгновенных значений
2)усредняющие (интегрирующие)
Мгновенные значения в отдельные моменты времени.
Усредняющие – интеграция нескольких значений во времени и выдают результат в виде некоторого проинтегрированного значения по некоторой величине ( позволяет избавиться от помехи)
По режиму работы:
1)циклического действия (по жесткой программе)
2)следящие – отслеживают изменения квантующей величины на некоторое значение ( как только квантованная величина изменилась, тут же появляется новый результат на выходе.
Разница между цифровыми измерительными устройствами и цифровыми приборами.
1.ЦАП – цифро-аналоговый преобразователь Nx x(t)
2.АЦП – аналого –цифровой преобразователь x(t) Nx ЦИУ +
ОУ (отсчетное устройство)
ЦИУ – цифровое измерительное устройство

АЦП + ОУ = ЦИУ ЦАП и АЦП - ЦП
30. Основные методы преобразования непрерывной величины в код.
Метод последовательного счета – обладает максимальным временем измерения, но самый дешевый. x(t)
xk |
|
|
|
|
|
|
|
|
|
|
xk |
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tн |
|
|
|
|
|
|
|
tк |
t |
|
|
|
|
|
|
|
|
|
|||
в tн - начальный момент – формируется квантующего сигнала
xн |
СУ |
xk |
сравнение |
|
|
|
|
|
|
|
|
tk – сравнение сигналов tиз=tk – tн
Вырабатывается единичный код и результат как произведение q на количество ступеней N xи≈xk=qN
tизм=tпр=Ntст
tизм=tпр – время измерения или преобразования tст – время формирования ступени.
Метод последовательного приближения – каждый следующий шаг – половина предыдущего
.
|
|
|
|
0 |
|
|
|
|
|
|
|
101 |
|||||
|
|
0 |
|
|||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
|
|
|
|
|
t |
|
Значение квантующего сигнала формируется следующим образом. xm – максимальное значение квантующего сигнала.
xk1 = xm/2 – первый шаг xk2= xm/4= xk1/2
xk3= xm/8= xk2/2 и т.д. xm = 8
t1=tн xm< xk
в t2 – от уровня на котором остановились (xm/4) xk2< xk
xk3> xk – в этом случае данный разряд 0. Время измерения закончилось результат 110 tизм=tпр=tст*n
n=log2Nm

Метод считывания – одновременное сравнение измеряемой величины со всеми уровнями квантования сразу. Время измерения самое маленькое, но дорогой.
хkm
хи
xk1
xи |
|
|
|
xk1 |
|
|
CУ1 |
||||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
xk2
СУ2
|
СУm |
xkm |
|
|
|||
|
|
|
|
|
|
|
|

31. Основные характеристики цифровых СИ.
Статические:
1) погрешность дискретности (квантования) д= к
2)чувствительности ч
3)реализации уровней квантования p
4) от действия помех п
Погрешность дискретности.
1) Измеряемая величина отождествляется с ближайшим большим или равным уровнем квантования . x(t)
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
xи |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
||||
|
|
|
|||||
|
|
|
|
|
|
|
t |
|
tн |
|
|
|
tк |
||
В общем случае – величина х –случайная, поэтому д – является также случайной величиной, распределенной по случайному закону.
д k xki x xk q; _ 0 1
D x x2 |
/12; _ дисперсия |
|
|||||||
|
|
k |
|
|
|
|
|
|
|
x xk |
|
|
|
|
|
|
|
||
/ 2 3; _ СКО |
|
||||||||
M x xk / 2 __ мат _ ожидание |
|||||||||
xп |
|
|
|
|
|
|
хп=хвх |
||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
45 |
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
1 |
|
2 3 4 |
|
хвх |
|||||
д |
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
2) С ближайшим меньшим или равным.
xп |
|
|
D x xk2 /12; _ |
||||
|
|
|
|
|
|||
|
|
|
|
|
x xk / 2 |
|
|
|
|
|
|
|
3; _ |
||
|
|
|
|
|
|||
|
|
|
45 |
|
M x xk / 2 |
||
|
|
|
|||||
|
|
|
|
|
|
|
|
1 2 |
3 4 |
x=xki-x |
|||||
д |
|
|
|
|
|
||
1
-1 

3) С ближайшим уровнем – если входная величина не превышала половины кванта, то на ближе к нижнему уровню, иначе к верхнему.
x
xk/2
x
xk/2
0.5 0.5
D x xk2 /12; _
M x 0
Погрешность квантования – методическая. Систематическая – мат ожидание.
Погрешность чувствительности.
Возникает в следствии неидеальности сравнивающего устройства из состава цифрового прибора
x xki x xk xcp д ч - погрешность дисперсии (методическая) + погрешность чувствительности (инструментальная)
x' |
|
|
|
xki |
xср – срабатывание сравнивающего устройства |
||
x |
|
|
|
|
|
|
|
xki-1 |
|
|
|
Погрешность от реализации уровней квантования.
x'ki+1
xki+1
x'ki
xki
x'ki-1
xki-1
В связи со смещением уровней квантования
(xki xсм ) x xk
Если бы смещения не было (xсм=0) то погрешность квантования – xki-x= α xk В связи с наличием смещения (xki+xсм)-x= α xk
новый уровень квантования
x xk xсм д p -

д – методическая; ч, р – инструментальная
Если смещение уровней квантования зависит от номера уровня, то погрешность p f (x) .
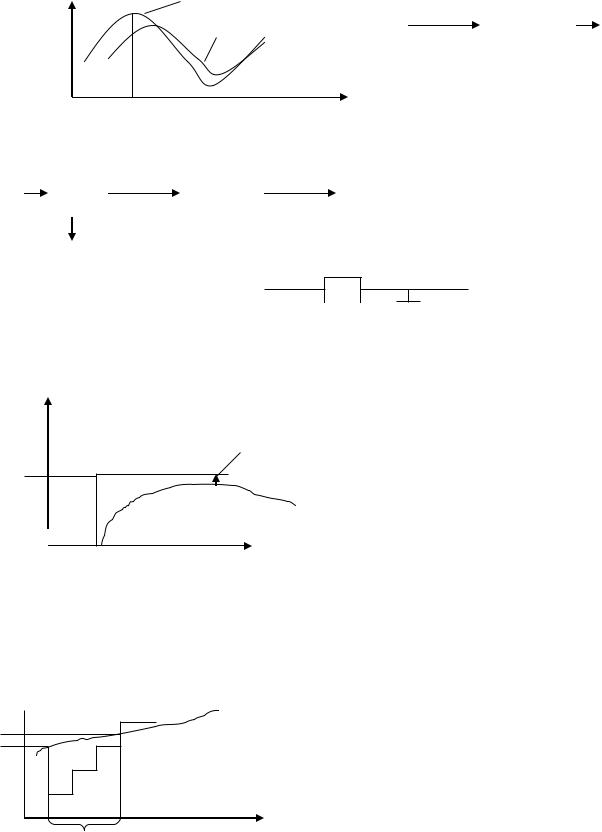
Погрешность, возникающая при квантовании временного интервала. При измерении временного интервала используются квантующие импульсы известной частоты.
f0 1/ T0 tx NT0 |
|
- количество импульсов на некоторый интервал времени T0 следования импульсов |
||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
2 |
|
3 |
|
4 |
|
5 |
|
|
6 |
|
7 |
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
старт |
|
|
|
|
|
|
|
tx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стоп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
t1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t2 |
t |
|||||
t1 0 T0 ; t2 T0 0 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
t t1 t2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
t1 и |
t2 - погрешности от временного сдвига старт- и стоп-импульсов относительно квантующего. |
|||||||||||||||||||||||
Суммарная случайная величина распределяется по закону Симпсона (треуг.закон) |
||||||||||||||||||||||||
tmax T0 ; _ |
|
|
|
|
|
|
- мах значение погрешности |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
max |
|
|
T0 / tx |
1/ Nx |
- мера точности относительно погрешности |
|||||||||||||||||||
t T0 / 6; _ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
M t 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Старт-импульс синхронизируют с половиной периода квантующего импульса. Класс точности c/d.

32. Помехозащищенность цифровых измерительных приборов.
Помехоустойчивость – способность устройства функционировать при действии помех. Помехозащищенность ЦИП – способность устройства производить измерения с требуемой точностью.
ЦВ
|
|
Uпн |
Rпн |
|
Rв |
|
|
Rвх |
||||
|
|
Ux |
I1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Rux |
|
|
Rн |
|
|
|
|
|
Rиз |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
I2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rзи |
Uпоб |
Rпоб |
|
|
|
Rзк |
||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uпн – источник (с сопротивлением Rпн) действия помехи нормального вида
Ux – измеряемый источник с сопротивлением Rux
Uпоб – эквивалентный источник помехи общего вида (сопротивление - Rпоб)
Rв, Rн – сопротивление соединительных проводов
Rиз – сопротивление изоляции
Rзк – сопротивление заземления контура
Rзи – сопротивление заземления источника
Помеха нормального вида – наводка на соединительные провода, суммируется с входным измеряемым сигналом.
Помеха общего вида – разность потенциалов между точками заземления источника и ЦВ
U |
экв |
U об |
U об |
___ I |
1 |
I |
2 |
___ U экв I R |
|||||||||||||
п |
|
|
|
п.н. |
|
|
|
п.в. |
|
|
|
|
|
п 2 н |
|||||||
I2 |
|
|
|
|
|
|
|
|
|
U об |
|
|
|
|
|
|
I2 |
|
U об |
||
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
п |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
R |
зи |
R R R |
зк |
Rоб |
|
|
R |
||||||||||||
|
|
|
|
|
н |
|
из |
|
п |
|
|
|
|
из |
|||||||
|
экв |
|
U об R |
|
|
|
U экв |
__ |
|
|
|
||||||||||
U |
|
|
п |
н |
|
__ R |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
п |
|
|
|
Rиз |
|
|
|
|
из |
|
|
|
п |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
D 20 lg |
U поб |
|
дБ |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
U |
экв |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т.к Rиз.>> Rзи, Rзк, Rпоб, Rн
C уменьшением Rиз растет воздействие помехи на результат. Чем больше сопротивление изоляции тем меньше влияние помехи общего вида на результат
- Оценка действия помехи общего вида
Действие помехи нормального вида – наводка на соединительные провода.
В общем случае
|
|
|
|
|
|
Nx - помехи нет |
|
|
Ux |
|
|
ЦВ |
|
|
|
|
|
|
||
|
|
|
|
|
||
Ux+Uпн |
|
|
ЦВ |
N' - величина кода (показания вольтметра) с учетом действия помехи |
||
N' |
x |
f (U |
x |
U н ) |
нормального вида |
|
|
||||||
|
|
|
п |
|
||

Помеха нормального вида имеет гармонический характер. Борьба с ней за счет интегрирования входного сигнала.
|
|
tи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N x |
k U x dt |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
k t |
U |
|
U н dt kt |
1 |
|
tи |
U |
|
U н dt |
||||||
|
|
|
||||||||||||||
x |
|
|
|
|
x |
п |
и t |
и |
|
|
|
|
x |
|
п |
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
||
|
|
t |
|
|
|
t |
|
|
|
|
|
|
t |
|
|
t |
ktи |
1 |
и U x dt k и U пн dt ktи |
|
1 |
|
и U x dt k и U m sin 2 fпt dt |
||||||||||
t |
t |
|
||||||||||||||
|
и |
0 |
|
|
|
0 |
|
|
|
|
и |
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ux cp |
погрешность от действия помехи нормального вида Uпн |
|
т.о. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
kt U |
xcp |
U н |
___ |
|
|
|
|
|
|
|
|
|
|||
x |
|
и |
|
п |
|
|
|
|
|
|
|
|
|
|
||
tи n / fп nTn Uпн 0 - если ввести время интегрирования кратное периоду помехи
fn=50Гц tи=n1/50=n*0.02c
33. Динамические погрешности ЦИУ.
Динамическая погрешность возникает при изменении мощности во времени сигнала.
|
U(t) |
Uвх(t) |
Ux(t) |
|
|
Iдин |
Uвых(t) |
|
|
Nx |
|
|
|
|
|
|
|
|
|
|
|
|
|
t
tи
Для оценки динамической погрешности принята следующая модель
Ux(t) |
|
|
|
Nx |
|
Вх Ц |
АЦП |
||||
|
|
|
|||
|
|
|
|
|
входная цепь
Rвх
Входная цепь представлена в виде -
Uвх(t) |
|
Cвх |
|
|
|
Uвых(t) |
|
|
|
|
|||
|
|
|
|
|
|
|
Iдин - динамическая погрешность первого рода, обусловлена апериодическими свойствами входной цепи.
U(t) |
|
Ux(t) |
Iдин |
Ux |
|
U'(t)
t
|
|
|
(1 e |
t |
|
U ' |
(t) U |
x |
Rвх Свх |
) |
|
x |
|
|
|
|
|
t ___ дин 0 _!!!
Пусть преобразование аналоговой величины в квантованную происходит методом последовательного счета.
динII(t) |
t0 – время начала измерения |
t0 |
tпр tk |
t |
IIдин определяется временем преобразования, с уменьшением времени преобразования погрешность стремиться к нулю.