

5.2.1 Пластик акрилонитрилбутадиенстирол (абс)
Пластик акрилонитрилбутадиенстиролявляется ударопрочной термопластической смолой на основе сополимера акрилонитрила с бутадиеном и стиролом. Сырьем для его производства является нефть. Непрозрачный пластик, легко окрашивается в разные цвета. Рабочая температура находится в пределах от 210 до 270 градусов Цельсия. Для лучшей адгезии первого слоя модели к рабочему столу требуется подогрев стола до 110 градусов Цельсия.
Достоинства:
долговечность;
ударопрочность и эластичность;
нетоксичность;
влагостойкость;
стойкость к щелочам и кислотам.
Недостатки:
неустойчивость к ультрафиолетовому излучению;
несовместим с пищевыми продуктами;
более хрупкий, чем пластика ПЛА;
термоусадка заметно выше чем у пластика ПЛА.
5.2.2 Пластик полилактид (пла)
Пластик ПЛА является биоразлагаемым, биосовместимым полиэфиром, мономером которого является молочная кислота. Сырьем для производства служат возобновляемые ресурсы — например, кукуруза или сахарный тростник. Рабочая температура ниже, чем у АБС: от 180 до 190 градусов Цельсия. Рабочий стол желательно нагревать до 50–60 градусов Цельсия.
Достоинства:
низкий коэффициент трения;
малая термоусадка;
менее хрупкий и более вязкий, чем AБС.
Недостатки:
меньшая, чем у AБС, долговечность;
дороже чем AБС;
ПЛА более гигроскопичен, при хранении требует соблюдения режима влажности, иначе может начаться расслоение материала и появление в нем пузырьков, что приведет к дефектам при изготовлении модели.
Поле выбора материала встал вопрос о непосредственно самом 3Dпринтере. Конструкции 3Dпринтеров рассматриваются в следующей главе.
6 Конструкция 3D – принтеров
6.1 Типы конструкций 3D– принтеров
Существует множество конструкций [9] [10] 3Dпринтеров каждая со своей схемой движения экструдера [11] по осям, с разной жесткостью и устойчивостью.
Самая распространенная PrusaMendel( Рисунок 6.1). В ней экструдер движется по осиXиZ, а стол движется по осиY. Несмотря на простоту конструкции, ее сложно настроить на идеальную геометрию,из-за того что вся конструкция состоит из резьбовых шпилек а так же из-за большого количества гаек которые нужно регулировать чтобы выставить перпендикулярность и диагональность. Данная конструкция очень сложна в калибровке, кроме этого точность принтера напрямую зависит от жесткости резьбовых шпилек. В следствии всего этого качество печати среднее
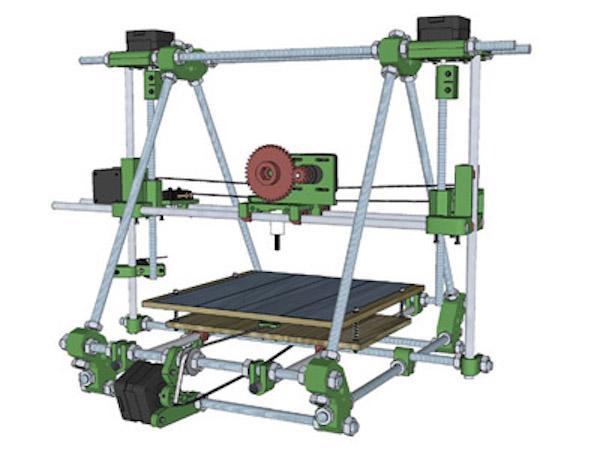
Рисунок 6.1 – Конструкция PrusaMendel
Но если модифицировать данную конструкцию заменив, шпильки на цельные элементы (Рисунок 6.2) результат будет гораздо лучше. Собрать такую конструкцию значительно проще. Качество печати в виду повышенной жесткости и устойчивости будет уже на уровне промышленных образцов.
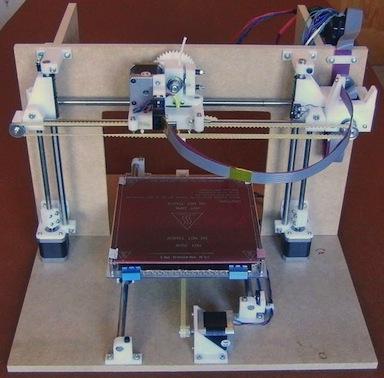
Рисунок 6.2 – Модифицированная конструкция PrusaMendel
Так же существуют конструкции в которых стол передвигается по осям XиY, а экструдер только по осиZ( Рисунок 6.3) .В данной конструкции двигатель осиYпри помощи двух зубчатых ремней двигает каретку осиXс размещаемым на ней двигателем, который в свою очередь, двигает печатающую головку. Данные конструкции обладают хорошим качеством и скоростью печати, но сложен в сборке. Недостатком является необходимость использования трех отдельных зубчатых ремней, которые должны быть натянуты струной. Если они будут висеть, то качество печати сильно ухудшится.
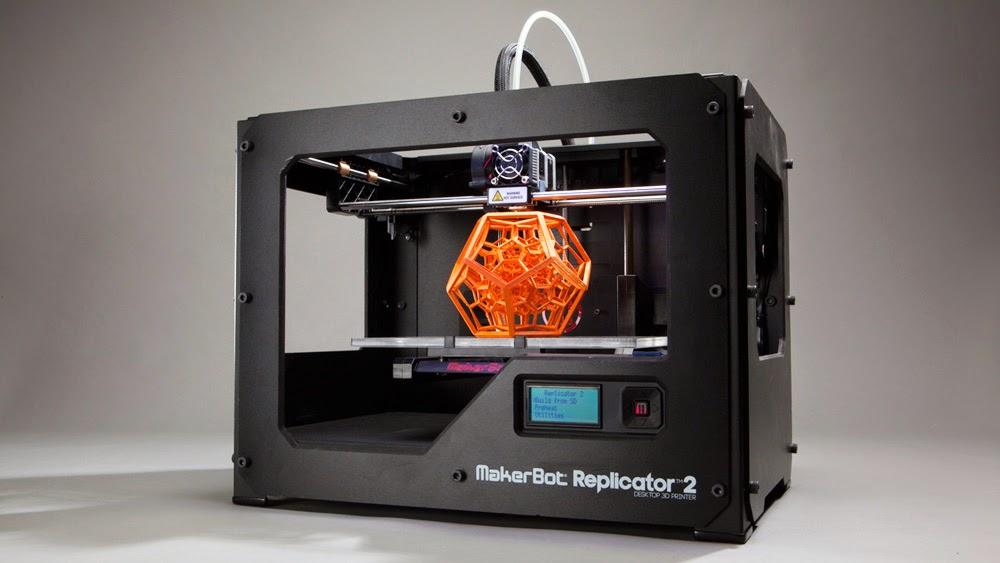
Рисунок 6.3 -Конструкция с движением стола по XиY,а экструдера поZ
Так же есть модификации данной конструкции (Рисунок 6.4) в которой двигатели осей XиYстоят неподвижно, при помощи зубчатых ремней (4 больших и 2 маленьких) и валов они двигают печатающую головку с большой скоростью.
Качество печати у такого принтера одно из самых лучших.
Минусы данной конструкции обилие зубчатых ремней и необходимость в идеально ровных валах, иначе весь механизм будет трясти при движении.
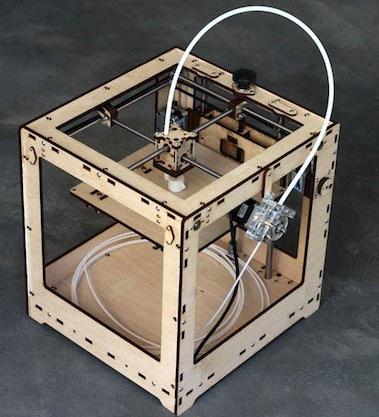
Рисунок 6.4 - Конструкция с неподвижными двигателями осей XиY
Еще один тип конструкции называется H–Bot( Рисунок 6.5 ), ее реализация состоит в том что вращая оба двигателя в одну и туже сторону, происходит движение по оси Х, если вращать двигатели в противоположные стороны – движется каретка по осиY(Рисунок 6.6). Если будет вращаться только один из двигателей, получим одновременное движение по двум осям (каретка поедет по диагонали).
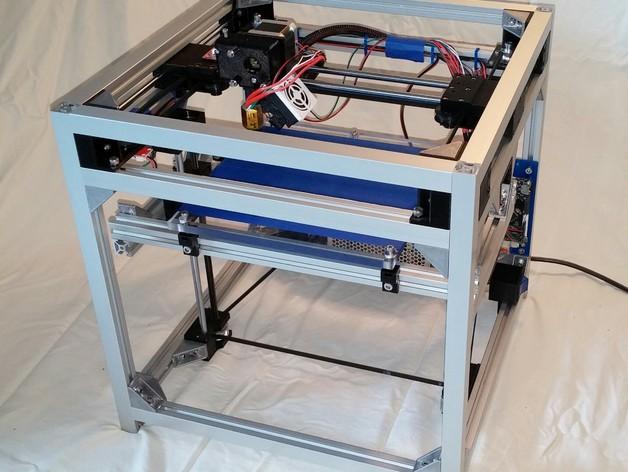
Рисунок 6.5 – Конструкция типа H-bot
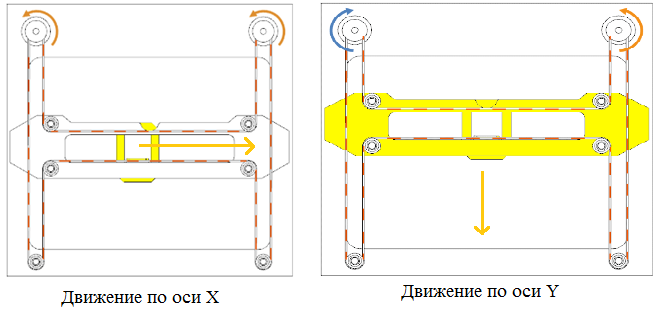
Рисунок 6.6 - Движение по осям принтера H-bot
Плюсы данной конструкции заключаются в том что двигатели находятся статично, им не нужно двигаться, соответственно можно брать двигатели небольшой мощности. Так же в данной конструкции всего один ремень, что упрощает натяжение. В данной конструкции качество печати уже на уровне дорогих профессиональных принтеров.
Минусы данной конструкции в том что принтер будет сложен в калибровке. Так же минусом является то что конструкция должна быть абсолютно жесткой, иначе будут присутствовать очень сильные погрешности печати.
Следующая конструкция называется дельта принтеры (Рисунок 6.7), в ней стол располагается неподвижно, а печатающая головка передвигается по всем трем осям.
Главный плюс этого принтера заключается в том печатающая головка может перемещаться по всем осям с очень быстрой скоростью. Но сразу появляется минус, для такой конструкции необходимы мощные движки. Так же минусом является то что для движения по любой из осей необходимо задействовать все три двигателя одновременно, поэтому возможен вариант с накоплением суммарной ошибки в точности позиционирования, которая, кроме всего прочего, зависит от наличия люфтов в шарнирах плеч.

Рисунок 6.7 – Конструкция дельта принтера