

Приложение а (Обязательное) Описание составных частей манипулятора верхней конечности InMoove распечатанных на 3d принтере
Таблица А.1
|
Наименование |
Изображение 3D модели |
Назначение |
|
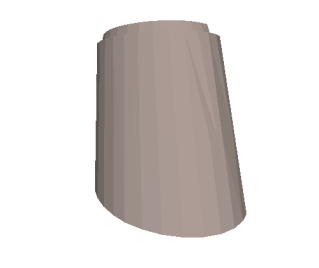
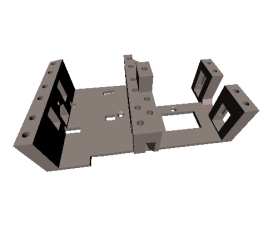
Основание ч1 |
|
Корпус устройства, в соединении с ч2 как единое целое |
|
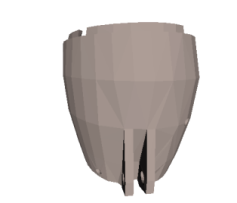
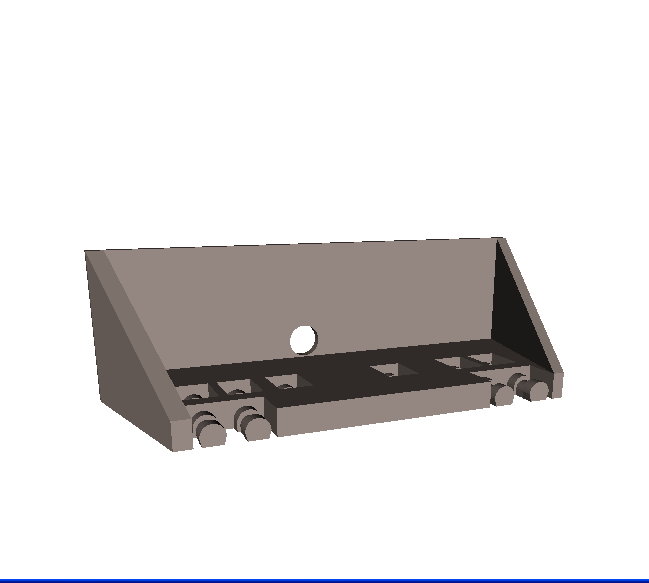
Основание ч2 |
|
Корпус устройства, в соединении с ч1 как единое целое |
|
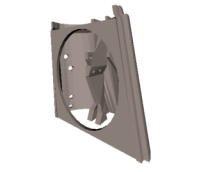
Основание ч3 |
|
Корпус устройства и платформа для крепления, единое целое с ч4 |
|
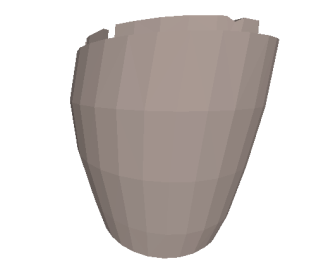
Основание ч4 |
|
Корпус устройства и платформа для крепления, единое целое с ч3 |
|
Площадка для сервоприводов |
|
Место крепления сервоприводов с разводкой лески. |
|
Натяжитель |
|
Обеспечивает крепление пружин для защиты лески от эрозии и сохранения постоянного натяжения |
Продолжение таблицы А.1
|
Наименование |
Изображение 3Dмодели |
Назначение |
|
Крышка площадки сервопривода 1 |
|
Составная часть площадки для сервопривода. |
|
Крышка площадки сервопривода 2 |
|
Составная часть площадки для сервопривода. |
|
Шкивы для сервомоторов |
|
Набор шкивов для крепления к сервоприводам.
Вариант для сервоприводов с актюатором |
|
Локтевая насадка |
|
Насадка для крепления к локтю, в данном случае как крышка – завершающая часть корпуса. |
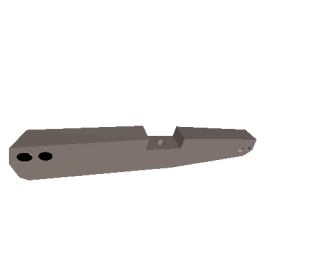
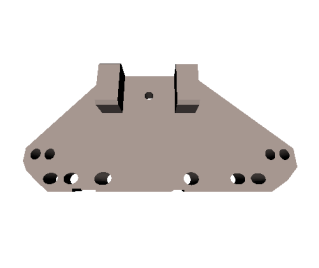
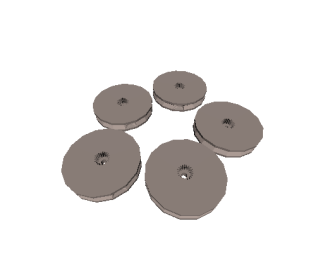
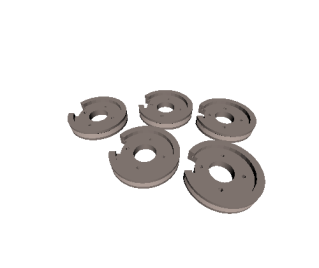
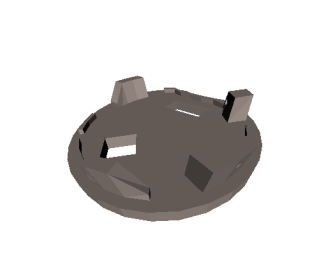
Таблица А.2
|
Наименование |
Изображение 3D модели |
Назначение |
|
Шестерни |
|
Для передачи вращения сервомотора запястью. |
|
Шарнир |
|
Обеспечивает крепление ладони к запястью. |
|
Статор |
|
Неподвижная часть запястья, место крепления сервомотора |
|
Ротор |
|
Подвижная часть запястья. |
|
Лескодержатель |
|
Используется для разводки лески ведущим к пальцам от сервоприводов предплечья. |
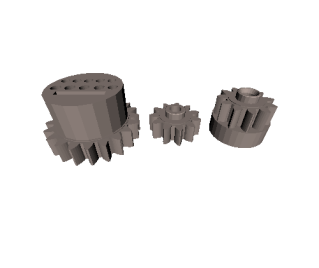



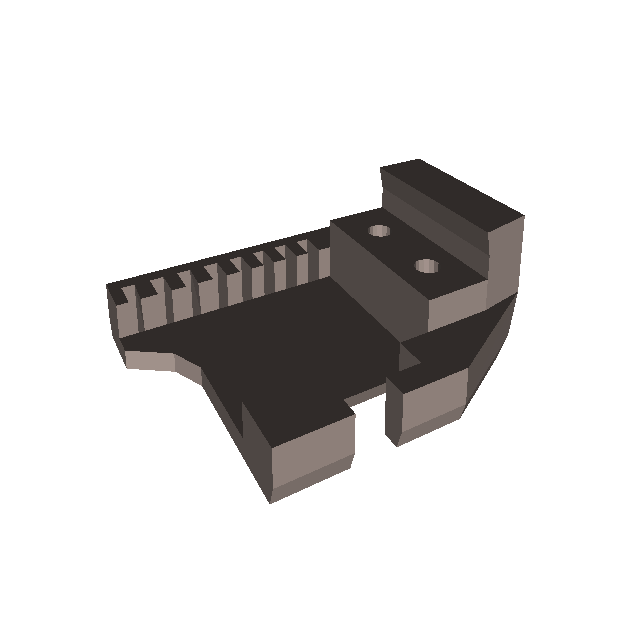
Таблица А.3
|
Номер детали |
Наименование |
Изображение 3D модели |
Назначение |
|
1 |
Большой палец |
|
Фаланги большого пальца |
|
2 |
Указательный палец |
|
Фаланги указательного пальца |
|
3 |
Средний палец |
|
Фаланги среднего пальца |
|
4 |
Безымянный палец |
|
Фаланги безымянного пальца |
|
5 |
Мизинец |
|
Фаланги мизинца |
|
6 |
Ладонь ч1 |
|
«Неподвижная» частьладнои к которой крепится большой палец и запястье. |
|
7,8 |
Ладонь ч2 |
|
«Подвижная» часть ладони к которой крепятся безымянный палец и мизинец. |
|
|
Болты крепления |
|
Болты для крепления частей ладони друг к другу и к запястью. |
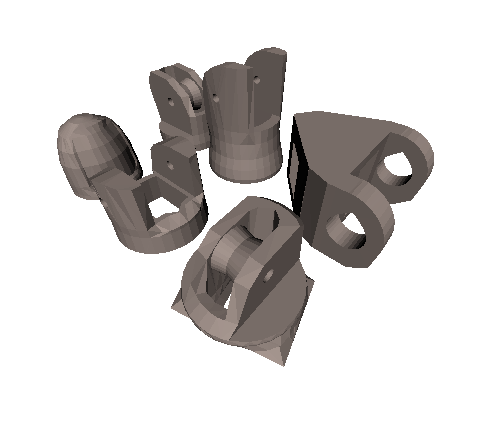


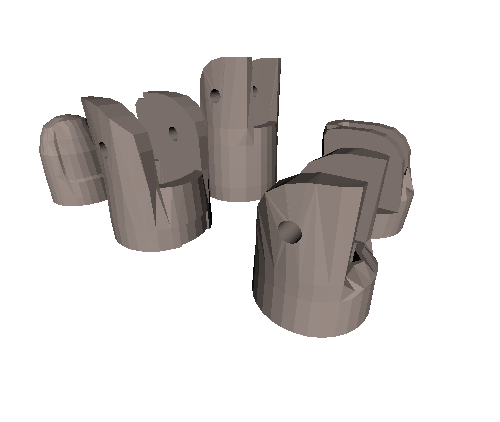

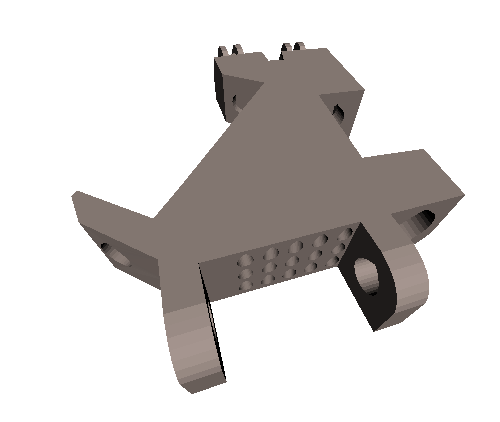
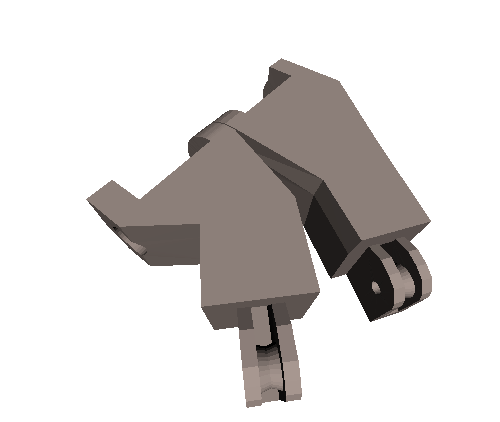
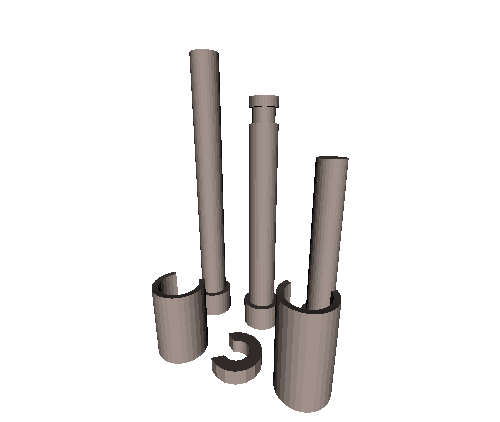
Таблица А.3
|
Наименование |
Изображение 3D модели |
Назначение |
|
Платформа |
|
Крепление платы, сервопривода и подвижной части устройства, основание |
|
Палец |
|
Тестируемый указательный 0палец из набора ладони |
|
Шкив |
|
Два варианта шкивов –для моделей с актюатором и без него |
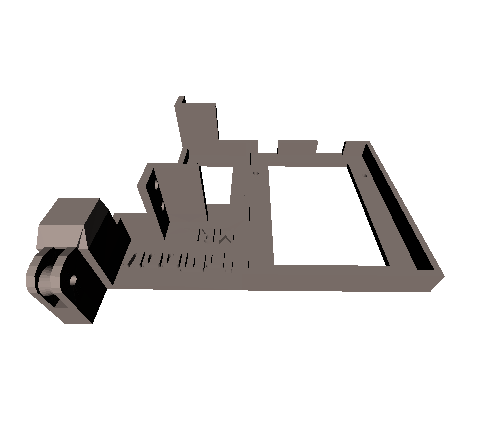
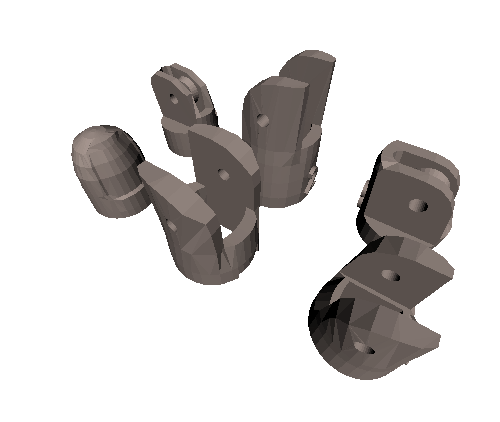
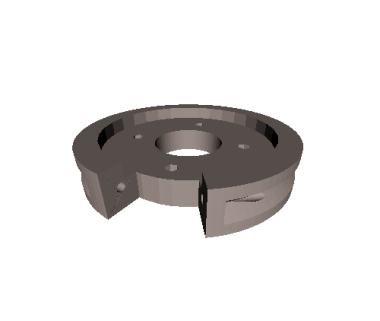
Таблица А.5 – Технические характеристики пластиков
|
Характеристика |
ABS |
PLA |
|
Предел прочности на разрыв |
30 МПа |
57,8 МПа |
|
Плотность |
1,05 г/см3 |
1,25 г/см3 |
|
Коэффициент удлинения |
6% |
30% |
|
Температура размягчения |
100°C |
50°C |
|
Температура плавления |
220°C |
180°C |
|
Прочность на изгиб |
41 МПа |
55,5 МПа |
|
Модуль упругости при растяжении |
1627 Мпа |
3,3 ГПа |