

литература / Sharapov_V._Datchiki
.pdfГлава 23. Датчики охранной сигнализации
Фирма CROW Electronic Engineering Ltd. выпускает два типа комбинированных датчиков DXR и SRX-1000. В датчиках используются сдвоенные пироэлементы и микрополосовые антенны, температурная компенсация, защита от электромагнитного и радиочастотного излучения, защита от попадания прямого солнечного света, регулировка чувствительности, быстросъемные пылезащитные высококачественные линзы, датчики вскрытия.
Фирма PYRONIX Ltd. производит серию датчиков, в которых реализованы сдвоенные или счетверенные пироэлементы, герметичная инфракрасная оптика, технология поверхностного монтажа, высокая степень защиты от радиопомех, защита антисаботажной зоны, датчик вскрытия.
Вдатчике EQUINOX-AM дополнительно реализована функция антимаскинга, которая основана на анализе микроволнового рассеяния в ближней зоне.
Фирма C&K Systems, Inc. (США) является одним из основоположников двойной технологии [11] и производит комбинированные датчики (инфракрасные + микроволновые) с 1982 г.
Вдатчиках фирмы C&K используется комбинированная зеркально-линзо- вая оптика с защитой антисаботажной зоны. Фирма C&K использует в своих датчиках волноводные рупорные антенны, реализует автоматическую температурную компенсацию инфракрасного канала, регулировку чувствительности СВЧ канала. В датчиках этой фирмы происходит аналого-цифровое преобразование и цифровая обработка обеих сигналов — и с инфракрасного, и с микроволнового детекторов. Микропроцессор, анализируя различные параметры сигналов, принимает решение о срабатывании каждого детектора комбинированного датчика, определяет время между срабатываниями каждого из детекторов, и если за заданное время произошел определенный набор срабатываний, выдается сообщение о тревоге.
Датчики серии DT-500 рекомендованы для использования в жилых помещениях, их главная особенность — игнорирование мелких и крупных домашних животных массой до 45 кг. Отсутствие срабатывания от животных достигается за счет усовершенствованного алгоритма обработки и использования низкочастотного диапазона — с понижением частоты уровень сигнала, отраженного от объектов малого размера, заметно снижается по сравнению с сигналом от человека.
Датчики серии DT-900 отличаются повышенной надежностью и рекомендуются для профессионального использования. Главная особенность этой серии — наличие схемы антимаскинга, основанной на использовании дополнительного активного инфракрасного канала. В конструкции датчиков этой серии используются три различных датчика вскрытия. Зеркальная оптика формирует 5—6 ярусов инфракрасных лучей, согласованных с диаграммой направленности сверхвысокочастотной антенной системы, обеспечивает полную защиту от зоны непосредственно под датчиком до 15—60 м.
Общим недостатком описанных комбинированных (или дуальных) датчиков являются высокая себестоимость и ограничение поля наблюдения зоной, общей для обоих типов устройств, поэтому в последнее время начинают появляться дуальные датчики на основе ультразвуковых и инфракрасных.

Литература
Литература
1.Кадино Э. Электронные системы охраны: Пер. с фр. — М.: ДМК Пресс, 2001. — 256 с.
2.Домрачев В.Г. и др. Схемотехника цифровых преобразователей перемещений: Справочное пособие. — М.: Энергоатомиздат, 1987. — 392 с.
3.Аналоговые и цифровые интегральные микросхемы: Справочное пособие / Под ред. С.В. Якубовского — 2-е изд., перераб. и доп.— М.: Радио и связь, 1985.— 432 с.
4.Электрические измерения неэлектрических величин / Под ред. П.В.Новицкого. — Л.: Энергия, 1975. — 576 с.
5.Зубчук В.И., Сигорский В.П., Шкуро А.Н. Справочник по цифровой схемотехнике.
— Киев.: Техника, 1990. — 446 c.
6.Кизлюк А.И. Справочник по устройству и ремонту телефонных аппаратов зарубежного и отечественного производства / 3-е изд. испр. и доп. — М.: АНТЕЛКОМ, 1999. — 207 с.
7.Фрайден Дж. Современные датчики: Справочник: Пер. с англ. — М.: Техносфера, 2005. — 592 с.
8.Шелестов И.П. Радиолюбителям: полезные схемы. — М.: Солон-Р, 2001. — 224 с.
9.Шило В.Л. Популярные цифровые микросхемы: Справочник. — 2-е изд., испр. — М.: Радио и связь, 1989. — 350 с.
10.http://www.texinvest.ru/alarmsys/alarmsys2006.11.24.htm.
11.http://security-systems.com.ua/support/recommendation/complex_dat.
12.http://bud-inform.com.ua/news/2004/12/08/ik_passivnye_datchik_999.html.
13.http://smi.kuban.info/article/62796/communikacia.
ГЛАВА 24
ДАТЧИКИ И ПРИБОРЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
24.1.Классификация и условия работы авиационных датчиков и приборов
Классификация бортового оборудования позволяет на этапах разработки новой машины подобрать оптимальное количество и состав тех датчиков, приборов и систем, которые должны быть на борту для обеспечения целенаправленного перемещения летательного аппарата (ЛА) в воздушном пространстве [1].
Датчики и приборы летательных аппаратов можно классифицировать по следующим признакам:
—назначение;
—выходной сигнал;
—способ представления информации;
—дистанционность действия.
По назначению их можно разделить на такие группы:
—пилотажно-навигационные приборы и датчики;
—приборы и датчики контроля режимов работы бортовых агрегатов;
—медико-биологические приборы и датчики;
—приборы и датчики для измерения параметров окружающего пространства.
Пилотажно навигационные приборы и датчики определяют линейные и угловые координаты положения ЛА и их производные: географическую широту и долготу, высоту полета, скорость полета, курс, углы тангажа и крена, углы атаки и скольжения, угловые скорости, линейные ускорения и др.
К физическим параметрам, которые определяются приборами и датчиками контроля режимов работы бортовых агрегатов, относятся давление, температура, расход жидкостей и газов, количество (уровень) жидкости, угловая скорость вращения вала двигателя и т.п.
Медико биологические приборы и датчики предназначены для контроля параметров, характеризующих жизнедеятельность организма человека или животного в обитаемых космических ЛА, а именно: частота пульса, частота и глубина дыхания, температура тела, давление крови, биотоки мыщц и др.
Приборы и датчики для измерения параметров окружающего пространства
выдают информацию о составе, концентрации, давлении, плотности и температуре межпланетного вещества, о зарядах частиц этого вещества и корпускулярных потоках Солнца, об энергетическом и химическом спектре космических лучей, о параметрах магнитных, гравитационных и электрических полей, окружающих планеты, и т.д.

24.1. Классификация и условия работы авиационных датчиков и приборов
По выходному сигналу приборы делятся на следующие основные виды:
—визуальные приборы с выходным сигналом, воспринимаемым органами зрения человека (перемещение стрелки, светового луча, электронного луча, цифровая индикация и т.д.);
—акустические приборы с выходным сигналом, воспринимаемым органами слуха человека (сила или тональность звука, смысловое сообщение и т.д.);
—приборы с выходным сигналом, воспринимаемым органами осязания человека (механическое, электрическое или химическое раздражение).
Датчики по выходному сигналу подразделяются на датчики:
—с электрическим выходным сигналом;
—с гидравлическим или пневматическим выходным сигналом;
—с механическим выходным сигналом;
—с оптическим выходным сигналом;
—с акустическим выходным сигналом.
По способу представления информации визуальные приборы делятся на следующие виды:
—приборы со стрелочной индикацией;
—приборы с изобразительной индикацией;
—приборы с цифровой индикацией.
Датчики по способу представления информации можно разделить на два вида:
—датчики с непрерывными сигналами;
—датчики с дискретными сигналами.
По дистанционности действия приборы можно разделить на два вида:
—приборы недистанционного действия;
—дистанционные приборы.
Во многих случаях в состав авиационных приборов входят первичные измерительные преобразователи перемещений, которые классифицируются следующим образом [7, 8]:
—по характеру измеряемых перемещений: линейные и угловые;
—по физическому принципу действия чувствительного элемента (фотоэлектрические, электростатические, пьезоэлектрические, электроакустические, электромагнитные, электромеханические);
—по структуре построения: с последовательным преобразованием, дифференциальные, компенсационные;
—по характеру выходного сигнала: непрерывные и дискретные;
—по параметру выходного сигнала, линейно зависящего от перемещения: непрерывные подразделяются на амплитудные, частотные, фазовые; дискретные — на амплитудно-импульсные, частотно-импульсные, вре- мя-импульсные, число-импульсные, кодоимпульсные.

Глава 24. Датчики и приборы летательных аппаратов
Датчики с частотным выходом, в свою очередь, классифицируются следующим образом [2, 8]:
—по физической природе: механические, акустические, корпускулярные и др.;
—по принципу действия: резонаторные, частотно-зависимые, развертывающие и интеграторные;
—по режиму работы: работающие в режиме свободных и вынужденных колебаний;
—по типу используемых элементов (с сосредоточенными и распределенными параметрами).
Установленные на борту самолета приборы и датчики работают в условиях, значительно отличающихся от наземных. Эти условия можно разделить на внутренние и внешние [6]. Внешние условия зависят от окружающей воздушной среды, метеорологической обстановки, электромагнитных и световых излучений, возмущенности магнитного поля Земли, электростатических полей и т.п. Внешние условия изменяются от различных случайных величин и учесть их влияние на работу приборов и датчиков достаточно сложно. Большинство единиц оборудования, как правило, размещается внутри воздушного судна, и его функционирование зависит от физических условий внутри кабин и отсеков. Внутренние условия задаются при проектировании и выборе состава бортового оборудования и поддерживаются в полете с помощью автоматических устройств в заданных пределах.
Если же не предпринимать специальные меры, то климатические условия окружающей среды внутри воздушного корабля могут изменяться в таких пределах:
—температура воздуха — от —60 до +60 °С, вблизи источников тепла она может достигать более 250 °С;
—давление воздуха — от 700…800 мм рт. ст. у поверхности Земли (760 мм рт. ст. = 101,32 кПа) до 40 мм рт. ст. на высоте 20000 м;
—плотность воздуха от 1,2255 до 0,0879 кг/м3 при изменении высоты от 0 до 20000 м;
—относительная влажность — от 0 до 100%.
Кроме климатических воздействий на работу приборов и датчиков существенно влияют вибрации и перегрузки (механические воздействия). Так, линейные ускорения центра масс (ц.м.) самолета достигают 5…10 g, вибрационные линейные ускорения в местах крепления приборов — от единиц до нескольких тысяч герц по частоте и от единиц до нескольких десятков g по ускорению. Угловые ускорения, вызванные колебаниями самолета относительно ц.м., могут достигать нескольких десятков 1 / c 2 ; а угловые ускорения, вызванные изгибными и крутильными колебаниями конструкции самолета, — до нескольких герц по частоте и нескольких десятков 1 / c 2 по амплитуде.
В связи с этим при проектировании и изготовлении авиационных датчиков и приборов необходимо обеспечить выполнение ряда общих и специальных требований, основные из которых сводятся к следующим:
— минимальные масса, габариты и стоимость;

24.2.Пилотажно-навигационные датчики и приборы летательных аппаратов
—высокая надежность функционирования элементов и систем в пределах установленного для них ресурса времени работы и температуры окружающей среды от — 60 до + 60…80 °С при влажности до 100%;
—работоспособность оборудования независимо от положения самолета в пространстве и возможных вибрационных и ударных воздействий;
—отсутствие влияния отдельных видов оборудования на работу соседних агрегатов и систем;
—высокая точность измерения, стандартизация отдельных элементов и всего оборудования в целом.
К авиационным приборам и датчикам предъявляют многочисленные требования, которые условно можно разбить на четыре группы:
—технические — точность, надежность, ресурс, время подготовки к работе
ит.д.;
—эксплуатационные — контролеспособность, возможность замены при отказах, наличие предохранительной блокировки и сигнализации, безопасность работы с устройствами, невозможность неправильного подключения и др.;
—производственно технологические требования, которые должны обеспечивать следующие характеристики оборудования:
• минимальные масса и габаритные размеры;
• унификация элементов и систем;
• минимальное потребление энергии;
• помехоустойчивость;
• простота изготовления.
—экономические требования, определяющие минимальную стоимость раз-
работок, изготовления и эксплуатации.
24.2.Пилотажно-навигационные датчики и приборы летательных аппаратов
Угловое положение самолета относительно плоскости горизонта характеризуется углами крена г и тангажа 4, а в плоскости горизонта — углом рыскания ш. Изменение этого положения оценивается угловыми скоростями и ускорениями, которые являются первой и второй производными угловых координат во времени.
Для измерения угловых положений, скоростей и ускорений используют ги роскопические приборы и датчики, которые позволяют экипажу визуально контролировать пространственное положение ЛА, а также вводить эти данные в виде электрических сигналов в автоматические или директорные системы управления и навигации [3, 4, 6, 8].
Наиболее распространены гироскопические приборы, в основу работы которых положены свойства трехстепенных (авиагоризонты, гировертикали, гирополукомпасы) или двухстепенных гироскопов (указатели поворота, выключатели коррекции и др.).

Глава 24. Датчики и приборы летательных аппаратов
|
Гироскоп представляет собой быст- |
||||||
|
ровращающееся |
твердое |
тело |
(ротор), |
|||
|
имеющее одну неподвижную точку и |
||||||
|
две или три степени свободы в про- |
||||||
|
странстве. На рис. 24.1 показано схе- |
||||||
|
матическое |
устройство |
гироскопа |
с |
|||
|
тремя степенями свободы. Ось ОZ, от- |
||||||
|
носительно которой совершается вра- |
||||||
|
щение ротора 3, называется главной |
||||||
|
осью гироскопа. Для создания степе- |
||||||
|
ней свободы относительно осей OX и |
||||||
|
OY ротор устанавливается в рамках |
||||||
|
карданова подвеса. Его оси внешней 1 |
||||||
|
и внутренней 2 рамок подвеса взаимно |
||||||
|
перпендикулярны и пересекаются |
с |
|||||
|
главной осью гироскопа в центре под- |
||||||
Рис. 24.1. Схема гироскопа с тремя сте- веса — в точке О. |
|
|
|
||||
пенями свободы: 1 — внешняя рамка; |
Устойчивость |
положения |
ротора |
||||
2 — внутренняя рамка; 3 — ротор |
|||||||
свободного |
(гироскоп, |
на |
котором |
||||
|
|||||||
|
не сказывается |
воздействие |
момента |
||||
внешних сил) астатического гироскопа в пространстве характеризуется кинетическим моментом гироскопа (считаем, что векторы угловой скорости движения элементов гироскопа и моментов сил направлены на наблюдателя, если их движение происходит против стрелки часов):
H ΒI Z , |
(24.1) |
где Β — угловая скорость ротора; ІZ — полярный момент инерции ротора. Предположим, что на внутреннюю рамку воздействует сила F1, которая на
плече l1 создает момент внешних сил MX, стремящийся повернуть рамку вокруг оси ОХ с угловой скоростью X. В результате возникновения поворотного (кориолисового) ускорения в роторе образуется момент MГY, называемый гироскопическим моментом. Его величина определяется из выражения
M ГY ΒI Z X H X . |
(24.2) |
Под воздействием этого момента гироскоп поворачивается относительно оси OY — возникает прецессия гироскопа. Угловая скорость прецессии ПРY зависит от кинетического момента H ротора гироскопа и приложенного момента M X внешних сил:
ПРY |
|
M X |
. |
(24.3) |
|
||||
|
|
H |
|
|
Аналогичное явление прецессии относительно оси ОХ возникает при наложении момента MY F2 l2 в результате возникновения гироскопического момента
M ГХ H Y . |
(24.4) |
Угловая скорость прецессии в этом случае определится из выражения
ПРХ |
|
MY |
. |
(24.5) |
|
||||
|
|
H |
|
|

Глава 24. Датчики и приборы летательных аппаратов
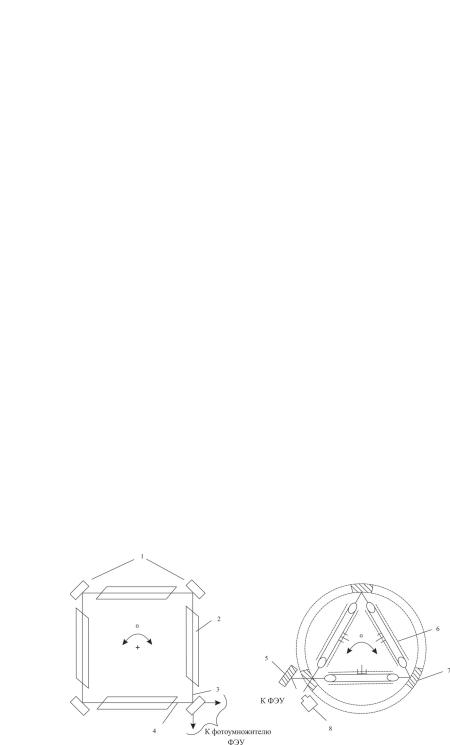
(рис. 24.2, а) или равностороннего треугольника (рис. 24.2, б). Как и в обычном линейном лазере, между смежными зеркалами резонатора помещаются трубки, заполненные активным возбужденным газом (гелиево-неоновой смесью при давлении 2…5 мм рт. ст.). Возбужденный газ усиливает возникающую в нем (или проходящую через него) радиацию в результате стимулированного излучения. В принципе кольцевой лазер может содержать только одну трубку с активным газом, если усиление, которое оно дает, достаточно для поддержания стационарного автоколебательного процесса.
В кольцевом лазере свет излучается с обоих концов трубки с активным газом. Благодаря отражательным зеркалам два вышедших из трубки луча света распространяются навстречу друг другу (по часовой стрелке и против нее) по замкнутым траекториям. Часть энергии обоих лучей выводится из системы посредством полупрозрачного зеркала и подается на регистрирующий прибор. В качестве последнего обычно используется фотоэлектронный умножитель или фотодиод.
Генерация в кольцевом лазере, как и в обычном линейном, возникает тогда, когда усиление в активной среде трубок превышает потери вследствие поглощения, рассеяния и дифракции на краях зеркала. Частоты генерируемых колебаний определяются собственными резонансными частотами кольцевого оптического резонатора (которые зависят от длины замкнутого оптического пути в нем, приблизительно равного его периметру L), частотами в полосе атомного перехода активного газа, соотношением усиления и потерь для каждой из резонансных частот, а также параметрами движения резонатора в инерциальном пространстве. Так, если кольцевой резонатор вращается в своей плоскости (см. рис. 24.2), то пути, которые должны пройти в нем две встречные волны, чтобы попасть в точку активной среды, откуда они вышли, будут разными.
Для волны, распространяющейся по направлению вращения, длина пути будет больше параметра резонатора L на некоторую величину L (точка, из которой луч вышел, уходит от него) и составит L L. Для встречной волны длина замкнутой траектории равна L L. Очевидно, что значение L пропорционально скорости вращения.
а) |
б) |
Рис. 24.2. Кинематическая схема лазерного гироскопа: 1, 7 — зеркала; 2, 6 — трубка с активным газом; 3 — луч, распространяющийся по часовой стрелке; 4 — луч, распространяющийся против часовой стрелки; 5 — полупрозрачное зеркало; 8 — детектор (ФЭУ)

24.2. Пилотажно-навигационные датчики и приборы летательных аппаратов
Изменение длины замкнутой траектории луча приводит к изменению резонансной частоты резонатора, а, следовательно, и частоты генерируемых колебаний. Частоты колебаний двух встречных волн становятся разными и зависят от скорости вращения резонатора. Между ними возникают биения с разностной частотой FP , которые, воздействуя на фотоэлектронный умножитель (ФЭУ), вызывают появление в его цепи тока такой же частоты.
Частота биения FP , пропорциональна угловой скорости вращения кольцевого лазера и позволяет измерить его величину. Выходной сигнал (ток ФЭУ) имеет форму, близкую к синусоидальной, и значение можно получить в цифровой форме. Для этого выходную синусоиду ограничивают, дифференцируют и подсчитывают число импульсов (число нулей синусоиды) в единицу времени. Это удобно при совместной работе гироскопа с цифровыми вычислительными машинами.
По существу описанное выше устройство — не гироскоп, сохраняющий неизменно определенное направление в пространстве, а гирометр, т.е. измеритель скорости вращения. Однако известно, что информацию об угловом смещении (повороте) можно использовать для стабилизации исходного положения.
Лазерные гироскопы широко используют для инерциальных навигационных систем (например, ЛГК-200 системы НСИ — 2000/НСИ — 2000 МТ). Лазерные гироскопы установлены на пассажирских самолетах «Боинг 737/747/757», аэробусах А-310/330/340 (фирмы Litton, Honeywell, США) и других самолетах.
В перспективных бесплатформенных навигационных системах используются лазерные гироскопы «Грант-1» и ГЛ-2 [4].
Измерители углов атаки и скольжения
Направление вектора воздушной скорости в системе координат, жестко связанной с осями самолета, определяется углами атаки и скольжения % (рис. 24.3).
Рис. 24.3. Углы атаки и скольжения
Для измерения углов атаки и скольжения применяют аэродинамический ме тод, на основе которого создаются бортовые приборы. Метод реализуется в двух вариантах.
В первом варианте чувствительным элементом является флюгер, т.е. обтекаемый элемент симметричного профиля, который может вращаться вокруг оси. Если направление потока изменяется, то флюгер устанавливается по потоку.