

2. Разработка требований к аср
2.1 Разработка требований к качеству управления и функциям аср
Основное требование к системе управления - поддержание заданного диапазона уровня щепы в загрузочном бункере.
Также система должна обеспечивать:
- вывод на экран текущего значения уровня щепы, оборотов ленточного конвейера, состояния электродвигателя (включен/отключен);
- регистрация, хранение данных об изменениях параметра по времени;
- автоматическое регулирование;
- ручное управление исполнительным механизмом;
- все необходимые данные при авариях, потере питания должны сохраняться на информационные носители;
- средняя наработка на отказ технических средств АСР должна быть не менее 50 000 часов.
3. Разработка структурной схемы аср
3.1 Разработка и описание структурной схемы
Автоматическая система контроля сводится к защите от переполнения приемного бункера. Автоматическая система регулирования (АСР) выполняет поддержание данного параметра технологического процесса в диапазоне заданных значений.
 Рисунок
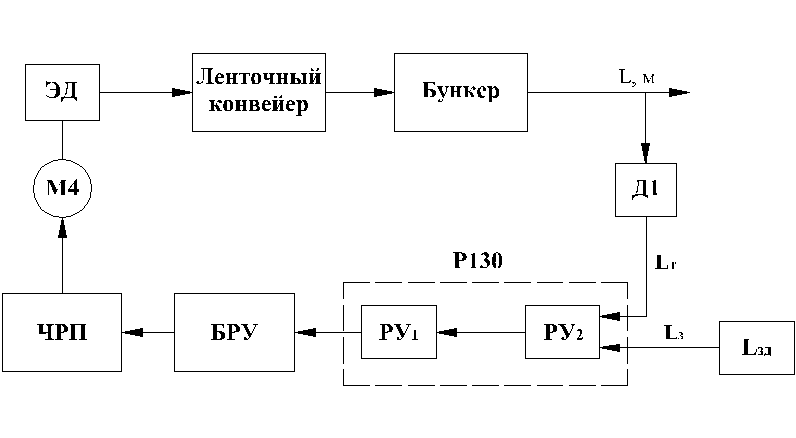
2 - Структурная схема АСР, где
Рисунок
2 - Структурная схема АСР, где
L – параметр уровня щепы в бункере;
LT, LЗ – текущее и заданное значение параметра уровня;
Д1 – датчик уровня, OPTIWAVE 6300C;
РУ1, РУ2 – регулирующее устройство (контроллер Ремиконт Р130);
Lзд – задатчик уровня (контроллер Ремиконт Р130);
БРУ – блок ручного управления;
ЧРП – частотно-регулируемый преобразователь;
ЭД – электродвигатель.
Описание структурной схемы АСР
Объект управления воздействует на датчик уровня (Д1), датчик тем самым передает сигнал на регулирующее устройство (РУ2), имеющий второй вход, куда подаётся заданное значение уровня (Lзд). В регуляторе сравниваются два воздействия. Образуется разностная величина, которая с помощью блока ручного управления (БРУ) и частотно-регулируемого преобразователя (ЧРП) воздействует на исполнительный механизм, (ЭД) ленточного конвейера. Исполнительный механизм через регулирующий орган воздействует снова на объект, тем самым, изменяя регулируемый параметр.
4. Разработка технической структуры аср
4.1 Разработка и описание технической структуры аср
Технические средства автоматизации (ТСА) выбираются по следующим показателям.
Требуемая точность измерения параметра.
Характеристики измеряемо среды.
Область применения и рекомендации производителя.
Стоимость ТСА.
Основной принцип выбора средств автоматизации заключается в следующем: точность измерительного средства должна быть достаточно высокой по сравнению с требуемой точностью измерения параметра, а трудоемкость измерения и стоимость должны быть, возможно, более низкими.
Выбор технических средств разрабатываемой сау
Выбор уровнемера
В качестве уровнемера щепы в бункере используем бесконтактный радарный уровнемер (FMCW) для сыпучих веществ OPTIWAVE 6300C. Излучаемый сигнал отражается от поверхности измеряемого продукта и с небольшой задержкой принимается антенной. Выходной сигнал 4-20мА, диапазон измерения до 80 м, стандартный класс точности ±10 м.
Выбор частотного преобразователя
Частотные преобразователислужат для плавного регулирования скорости асинхронного двигателя за счет создания на выходе преобразователя трехфазного напряжения переменной частоты. В простейших случаях регулирование частоты и напряжения происходит в соответствии с заданной характеристикой V/f, в наиболее совершенных преобразователях реализовано так называемое векторное управление.
Принцип работы частотного преобразователяили как его часто называют - инвертора: переменное напряжение промышленной сети выпрямляется блоком выпрямительных диодов и фильтруется батареей конденсаторов большой емкости для минимизации пульсаций полученного напряжения. Это напряжение подается на мостовую схему, включающую шесть управляемых IGBT или MOSFET транзисторов с диодами, включенными анти параллельно для защиты транзисторов от пробоя напряжением обратной полярности, возникающей при работе с обмотками двигателя. Кроме того, в схему иногда включают цепь "слива" энергии - транзистор с резистором большой мощности рассеивания. Эту схему используют в режиме торможения, чтобы гасить генерируемое напряжение двигателем и обезопасить конденсаторы от перезарядки и выхода из строя
Используя специальный алгоритм управления - открывая и закрывая перекрестные пары транзисторов формируют направление и ШИМ напряжение в фазах двигателя и создают необходимую величину и форму тока в фазных обмотках при разных частотах вращения поля.
Преобразователь частоты ABB ACS800 предназначены для использования в промышленности. Номенклатура полнофункциональных преобразователей частоты ABB ACS800 и их модулей охватывает широкий диапазон мощностей от 0,55 – 5600 кВт и напряжений 220 – 690 В.
“Сердцем” привода ABB ACS800 является алгоритм управления двигателем DTC (Direct Torque Control) – прямое управление моментом, который обеспечивает высокие эксплуатационные характеристики и дает существенные преимущества: точное статическое и динамическое управление скоростью и крутящим моментом, большой пусковой момент и возможность использования длинных кабелей двигателя (до нескольких километров).
Техническая структура разрабатываемой АСР приведена в Приложении А.
Таблица 1. Краткие технические характеристики частотного преобразователя ABB ACS800.
|
Номинальная мощность двигателя |
75kW |
|
Диапазон выходной частоты |
0-300 Hz |
|
Номинальный ток |
202 A |
|
Точность задания частоты |
±0.2% от максимальной частоты |
|
Аналоговое управление заданием тока двигателя |
Есть, 4-20 мА |
|
Обратная связь по току двигателя |
Есть, 4-20 мА |
|
Частота шим |
0,7-14,5 кHz |
|
Напряжение питающей сети |
380-480 V |
Задание тока двигателя мельницы будем заводить в частотный преобразователь через аналоговый вход (0 (4) – 20 мА).
Выбор блока ручного управления
Блок ручного управления (БРУ-32) предназначен для переключения режимов управления на ручной и обратно, для световой индикации режимов управления исполнительными устройствами, для определения положения регулирующего органа. Блок ручного управления этой серии изготавливают в соответствии с ТУ 4218-004-54079067-2004.
Спецификация оборудования приведена в Приложении Г.