

-
По полученному графику оценим качество работы системы
1.Запаздывание: 30с
2. Время переходного процесса ( время попадания в зону 5% от 0,3%):
300с
3. Время регулирования : точность ±0,06%: 510с
4. Запас устойчивости: غ = 99% , m= 0.73, колебаний=1 – очень неплохо
5. Перерегулирование: 13% - в пределах нормы
6. Максимальное отклонение: 3,4
7. Статистическая ошибка: 0
-
Рассчитаем переходный процесс при изменении возмущающего действия.
Дискретная модель объекта регулирования
Wo(Z) =
 ,
где
d = e
,
где
d = e![]() = e
= e![]() =
0,63;
=
0,63;
Wo(Z) =
![]() =
=
![]() =
=
![]()
Дискретная модель регулятора
![]()
Дискретная модель датчика
W![]() (Z)
= К
(Z)
= К![]() =1=
=1=
![]()
Значит, сигнал через датчик проходит без изменений
Изменение
регулируемого параметра у(t)
может происходить за счёт изменения
задающего g![]() (t)
и возмущающего f
(t)
и возмущающего f![]() (t)
воздействий.
(t)
воздействий.
Из условия эти воздействия определяются как:
![]() g(t)
= G*1[t]
; G
= 3 кг/см
g(t)
= G*1[t]
; G
= 3 кг/см![]()
![]() f
f![]() (t)
= F*1[t]
; F
= -2,5 кг/см
(t)
= F*1[t]
; F
= -2,5 кг/см![]()
Переходим к системе разностных уравнений при нулевых начальных условиях:
Уравнение объекта регулирования:
Wo(Z)
=
![]()
![]() =
=
![]()
Z∙ С1 (Z)-0,63∙ С1 (Z)=27.75 ∙Z-1∙R(Z)
С1[n+1]-0,63∙ С1[n]=27.75∙R[n-1]
С1[n]=0,63∙ С1[n-1]+27.75∙R[n-2]
Уравнение датчика:
y![]() [n]
= K
[n]
= K![]() ∙y[n]
= 1∙y[n]
∙y[n]
= 1∙y[n]
Уравнение сумматора:
x[n] =
![]() g∙K
g∙K![]() -y
-y![]() [n]
= 3∙1 - y
[n]
= 3∙1 - y![]() [n]
= 3 - y
[n]
= 3 - y![]() [n]
[n]
Уравнение регулирующего блока:
R[n]=R[n-1]+
K![]() ∙x[n]+
K
∙x[n]+
K![]() ∙x[n-1]
∙x[n-1]
R[n]=R[n-1]+0.01∙x[n]-0.005∙x[n-1]
Возмущающее воздействие согласно
заданию задается выражением
 .
.
Математическая модель объекта
регулирования по каналу передачи
возмущения соответствует математической
модели апериодического звена 1 порядка
с запаздыванием. Реакция на ступенчатую
функцию с амплитудой
![]() является типовой и описывается
зависимостью
является типовой и описывается
зависимостью
![]()
Перейдем от непрерывной функции к решетчатой путем формальной замены t на nT. Тогда получаем выражение
![]() ,
,
так как из п.4.3 известно, что
![]() ,
то
,
то
![]()
или с учетом числовых значений параметров
![]()
Y[n]= С1[n]+ С[n]
Выбираем параметры настройки ПИ-регулятора:
К![]() = 0.01 К
= 0.01 К![]() = 0.005
= 0.005
Где:
n-такт
t-время
G[n]-задание
С1[n]-выход системы по заданию
Y1[n]-выход с датчика
X[n]-ошибка системы
R[n]-выход регулятора
C[n]-возмущение
Y[n]- итоговый сигнал
|
t |
n |
F[n] |
G[n] |
C1[n] |
Y1[n] |
X[n] |
R[n] |
C[n] |
Y[n] |
K2 |
K1 |
|
0 |
1 |
-2,5 |
3 |
0 |
0 |
3 |
0,03 |
0 |
0 |
0,005 |
0,01 |
|
30 |
2 |
-2,5 |
3 |
0 |
-0,78299 |
3,78299 |
0,05283 |
-0,78299 |
-0,78299 |
0,005 |
0,01 |
|
60 |
3 |
-2,5 |
3 |
0,8325 |
-0,47534 |
3,475344 |
0,068668 |
-1,30784 |
-0,47534 |
0,005 |
0,01 |
|
90 |
4 |
-2,5 |
3 |
1,990505 |
0,330841 |
2,669159 |
0,077983 |
-1,65966 |
0,330841 |
0,005 |
0,01 |
|
120 |
5 |
-2,5 |
3 |
3,159566 |
1,26407 |
1,73593 |
0,081997 |
-1,8955 |
1,26407 |
0,005 |
0,01 |
|
150 |
6 |
-2,5 |
3 |
4,154562 |
2,100983 |
0,899017 |
0,082307 |
-2,05358 |
2,100983 |
0,005 |
0,01 |
|
180 |
7 |
-2,5 |
3 |
4,892784 |
2,733239 |
0,266761 |
0,08048 |
-2,15954 |
2,733239 |
0,005 |
0,01 |
|
210 |
8 |
-2,5 |
3 |
5,366481 |
3,135905 |
-0,13591 |
0,077787 |
-2,23058 |
3,135905 |
0,005 |
0,01 |
|
240 |
9 |
-2,5 |
3 |
5,614198 |
3,336008 |
-0,33601 |
0,075106 |
-2,27819 |
3,336008 |
0,005 |
0,01 |
|
270 |
10 |
-2,5 |
3 |
5,695532 |
3,385426 |
-0,38543 |
0,072932 |
-2,31011 |
3,385426 |
0,005 |
0,01 |
|
300 |
11 |
-2,5 |
3 |
5,672388 |
3,340888 |
-0,34089 |
0,07145 |
-2,3315 |
3,340888 |
0,005 |
0,01 |
|
330 |
12 |
-2,5 |
3 |
5,597472 |
3,251631 |
-0,25163 |
0,070639 |
-2,34584 |
3,251631 |
0,005 |
0,01 |
|
360 |
13 |
-2,5 |
3 |
5,509157 |
3,153703 |
-0,1537 |
0,07036 |
-2,35545 |
3,153703 |
0,005 |
0,01 |
|
390 |
14 |
-2,5 |
3 |
5,430989 |
3,069091 |
-0,06909 |
0,070437 |
-2,3619 |
3,069091 |
0,005 |
0,01 |
|
420 |
15 |
-2,5 |
3 |
5,374004 |
3,007787 |
-0,00779 |
0,070705 |
-2,36622 |
3,007787 |
0,005 |
0,01 |
|
450 |
16 |
-2,5 |
3 |
5,340258 |
2,971145 |
0,028855 |
0,071032 |
-2,36911 |
2,971145 |
0,005 |
0,01 |
|
480 |
17 |
-2,5 |
3 |
5,326423 |
2,955369 |
0,044631 |
0,071334 |
-2,37105 |
2,955369 |
0,005 |
0,01 |
|
510 |
18 |
-2,5 |
3 |
5,326794 |
2,95444 |
0,04556 |
0,071567 |
-2,37235 |
2,95444 |
0,005 |
0,01 |
|
540 |
19 |
-2,5 |
3 |
5,33541 |
2,962183 |
0,037817 |
0,071717 |
-2,37323 |
2,962183 |
0,005 |
0,01 |
|
570 |
20 |
-2,5 |
3 |
5,347288 |
2,973477 |
0,026523 |
0,071793 |
-2,37381 |
2,973477 |
0,005 |
0,01 |
|
600 |
21 |
-2,5 |
3 |
5,358944 |
2,984741 |
0,015259 |
0,071813 |
-2,3742 |
2,984741 |
0,005 |
0,01 |
|
630 |
22 |
-2,5 |
3 |
5,368401 |
2,993935 |
0,006065 |
0,071798 |
-2,37447 |
2,993935 |
0,005 |
0,01 |
|
660 |
23 |
-2,5 |
3 |
5,374912 |
3,00027 |
-0,00027 |
0,071765 |
-2,37464 |
3,00027 |
0,005 |
0,01 |
|
690 |
24 |
-2,5 |
3 |
5,378581 |
3,003821 |
-0,00382 |
0,071728 |
-2,37476 |
3,003821 |
0,005 |
0,01 |
|
720 |
25 |
-2,5 |
3 |
5,379975 |
3,005136 |
-0,00514 |
0,071696 |
-2,37484 |
3,005136 |
0,005 |
0,01 |
|
750 |
26 |
-2,5 |
3 |
5,379831 |
3,004939 |
-0,00494 |
0,071672 |
-2,37489 |
3,004939 |
0,005 |
0,01 |
|
780 |
27 |
-2,5 |
3 |
5,378845 |
3,003917 |
-0,00392 |
0,071657 |
-2,37493 |
3,003917 |
0,005 |
0,01 |
|
810 |
28 |
-2,5 |
3 |
5,377566 |
3,002614 |
-0,00261 |
0,071651 |
-2,37495 |
3,002614 |
0,005 |
0,01 |
|
840 |
29 |
-2,5 |
3 |
5,376358 |
3,001391 |
-0,00139 |
0,07165 |
-2,37497 |
3,001391 |
0,005 |
0,01 |
|
870 |
30 |
-2,5 |
3 |
5,375416 |
3,000437 |
-0,00044 |
0,071653 |
-2,37498 |
3,000437 |
0,005 |
0,01 |
|
900 |
31 |
-2,5 |
3 |
5,374798 |
2,999813 |
0,000187 |
0,071657 |
-2,37499 |
2,999813 |
0,005 |
0,01 |
|
930 |
32 |
-2,5 |
3 |
5,374481 |
2,999491 |
0,000509 |
0,071661 |
-2,37499 |
2,999491 |
0,005 |
0,01 |
|
960 |
33 |
-2,5 |
3 |
5,374394 |
2,999401 |
0,000599 |
0,071664 |
-2,37499 |
2,999401 |
0,005 |
0,01 |
|
990 |
34 |
-2,5 |
3 |
5,374454 |
2,999459 |
0,000541 |
0,071667 |
-2,375 |
2,999459 |
0,005 |
0,01 |
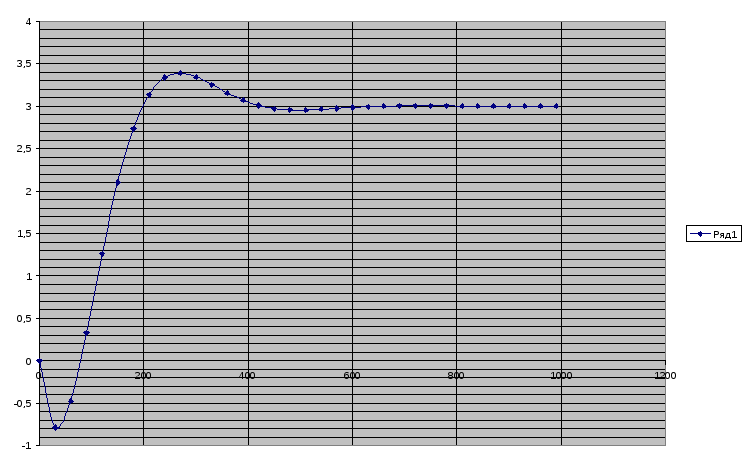
Как видно по графику система очень хорошо справляется с воздействием вомущения
Время регулирование увеличилось на 60с итого 360с
Статическая ошибка не изменилась =0
Динамическая ошибка также не изменилась =3,4