На сортировку / 2102172 / Sau-2_lab
.docx
Коммерциялық
емес
акционерлік
қоғам
АЛМАТЫ
ЭНЕРГЕТИКА ЖӘНЕ
БАЙЛАНЫС
УНИВЕРСИТЕТІ
ӨҚЭжА кафедрасы
«Автоматты басқару жүйесі» пәнінен
Зертханалық жұмыс №2
Орындаған: Эук-15-12 тобының
Құрманбай Д.Б
Тексерген: Жаркымбекова М.Б
Алматы 2017
Тұйықталған АРЖ орнықтылығын зерттеу
Жұмыстың мақсаты:
2.1.1 Тұйықталған АРЖ орнықтылығын зерттеу әдістерін үйрену.
2.1.2 ЭЕМда сызықты АРЖ орнықтылығын зерттеу.
2.2 Қысқаша теориялық кіріспе
Жобаланған АРЖ қасиеттерін бағалау кезінде оның орнықтылығын түсіндіріледі. Динамикалық жүйенің АРЖ орнықтылығы туралы түсінік оның сыртқы әсерлерінен кейінгі қозғалысымен (әрекетімен) байланысты, яғни оның бастапқы шарттарының әсерінен кейінгі еркін қозғалысы. Жүйе орнықты, егер сыртқы әсер тоқтағаннан соң, ол біраз уақыт өткеннен кейін бастапқы күйіне келеді. Болмаса, сызықты жүйенің орнықтылығы – бұл оның өтпелі процестерінің өшу қасиеті.
Орнықтылықты бағалау реттеуді (басқаруды) жүзеге асырудың принципиалды қабілеті болып табылады, сондықтан орнықтылықты бағалаумен және кез келген АРЖ зерттеуді бастайды.
Сызықты АБЖ орнықтылығы сызықты емес АБЖ қарағанда сыртқы әсерлерге тәуелді емес және жүйенің өзінің параметрлерімен анықталады. Егер сызықты жүйе тұрақты болса, яғни ол кез келген орнықтылық режімде орнықты және кез келген процестің өтпелі құраушылары әрқашан шығатыня болады.
Сызықты стационарлы жүйенің орнықтылығы (асимптотикалық орнықтылығы) үшін оның сипаттамалық теңдеуінің түбірлері кері нақты бөлікке ие болуы жеткілікті. Бір ғана оң нақты бөлікке ие болса, жүйе орнықсыз болады. Жүйе орнықтылық шегінде деп айтылады, егер нөлдік түбір немесе жорамал бөліктер болған жағдайда.
Жүйеде жорамал түбірлер болған кезде тұрақты амплитудалы өшпейтін гармоникалық тербеліске орны алады.
Практакада АРЖ орнықтылығын орнықтылық критерийлері көмегісен анықтайды, яғни жүйенің орнықтылығын сипаттамалық теңдеудің түбірлерін есептемей-ақ түсіндіруге мүмкіндік береді. Орнықтылық критерийін екіге бөледі: алгебралық және жиіліктік.
Алгебралыққа Гурвиц және Раус критерийі, ал жиіліктікке Михайлов және Найквист критерийлері жатады.
Гурвиц критерийі (буындарсыз кешігу) жүйенің параметрлері белгілі болған жағдайда, 3 және 4 ретті жүйені зерттеуге қолайлы. Сондай-ақ, ол орнықтылыққа қандай да бір параметрдің әсер ету тәуелділігіның аналитикалық өрнегін алуға және критикалық күшейту коэффициентін табу үшін мүмкіндік береді.
Раус критерийі жоғары ретті жүйенің орнықтылығын анықтау кезінде пайдаланылады.
Михайлов критерийі тұйықталған жүйенің сипаттамалық векторын соңын сипаттайтын, жүйенің орнықтылығын годограф бойынша түсіндіруге мүмкіндік береді.
Кез келген орнықтылық критерийін пайдалана отыра, орнықтылықтың шегін анықтауға болады.
Найквист критерийі көп қолданылады. Мұның себебі төменде:
Тұйықталған күйдегі жүйенің орнықтылығын зерттеу оның ашық (тұйықталмаған) тізбектерінің жиіліктік беріліс функциялары бойынша зерттеуге болады, ал бұл - көбінесе қарапайым көбейткіштерден құралады.Жүйенің нақты параметрлері коэффициенттер болып табылады, оларды орнықтылық шартынан таңдап алуға мүмкін болады.
Орнықтылықты зерттеу үшін алынған нәтижелердің нақтылығын жоғарылататын жүйенің күрделі элементтерінің жиіліктік сипаттамамын пайдалануға болады.
Орнықтылықты зерттеуді логарифмдік жиіліктік сипаттамалар арқылы зерттеуге болады, ал оларды тұрғызу аса қиынға соқпайды.
Орнықтылық қорын анықтау, коррекциялау құрылғыларының синтезін өткізу ыңғайлы болып келеді.
Найквист критерии және оның логарифмдік жиіліктік сипаттамасы жүйенің құрылымдық жағынан орнықсыздығы жайлы түсіндереді.
Сурет
2.1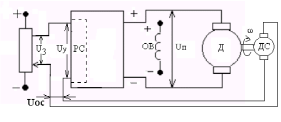
Құрылымдық жағынан орнықсыз жүйе парамертлері кез келген мәнде болса да орнықсыз болады. Тек құрылымдық сұлбаны өзгерте отыра, орнықты жасауға болады. Мысалы, бірконтурлы және бір инерциялы және екі интегралданатын буыннан құралған жүйе құрылымдық жағынан орнықсыз.
Қозғалтқыштың жылдамдығын тұрақтандыратын жүйенің АРЖ орнықтылығын қарастыралық (сурет 2.1).
Жылдамдық датчикы (ЖД) ретінде тахогенератор не тахомертлік көпір қолданылуы мүмкін. Жалпы жағдайда, түрлендіргіштің Т кірік каскадының қызметін аралық күшейткіш – жылдамдықты реттегіш (ЖР) атқарады.
2.2)
Осы құрылымдық сұлбаны ескергенде алынған түрі (сурет 2.3):
Сурет
2.3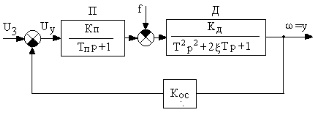
Мұндағы КП – жалпы ЖР және Т күшейту коэффициенті.
2.3 Жұмысты орындау тәртібі
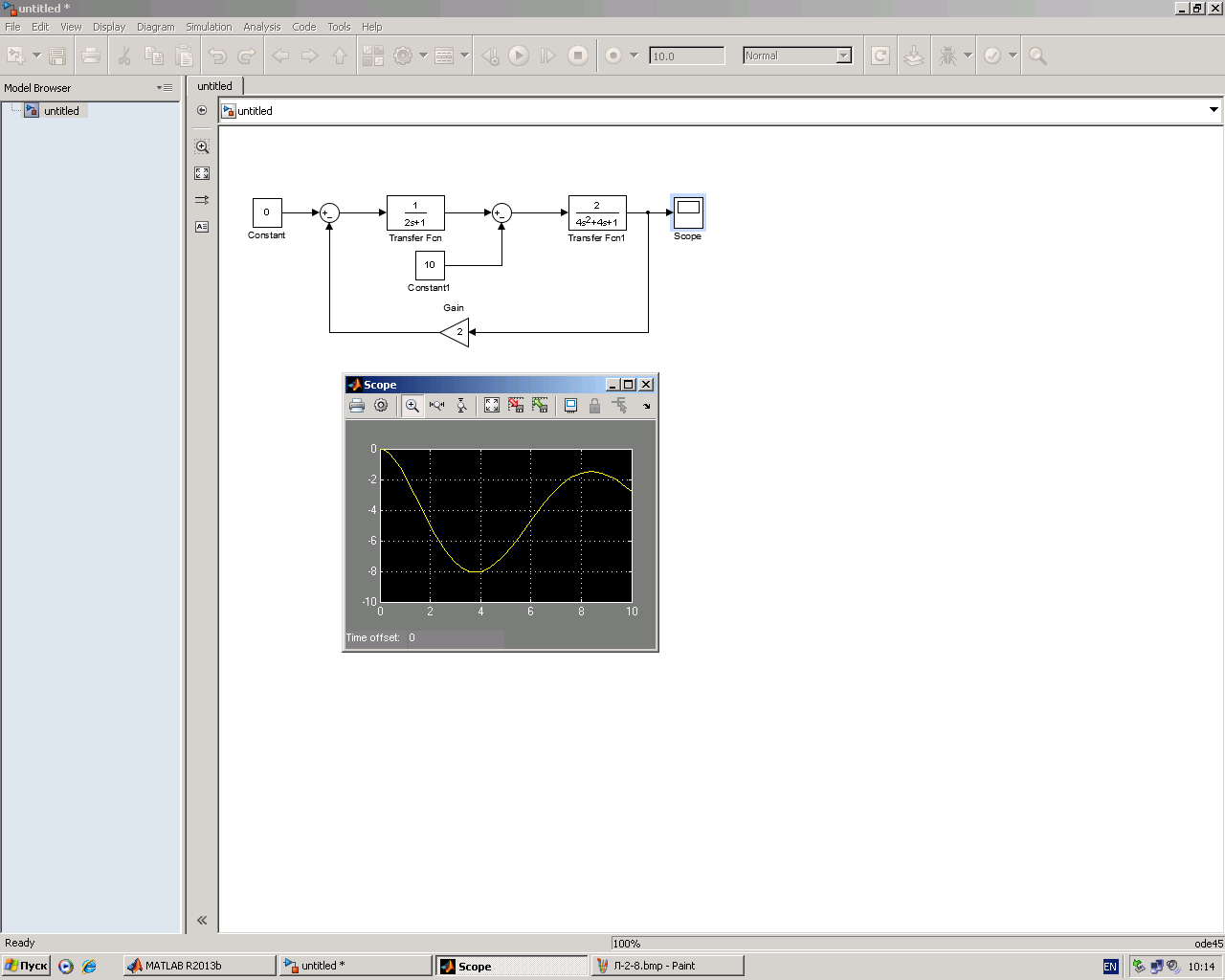
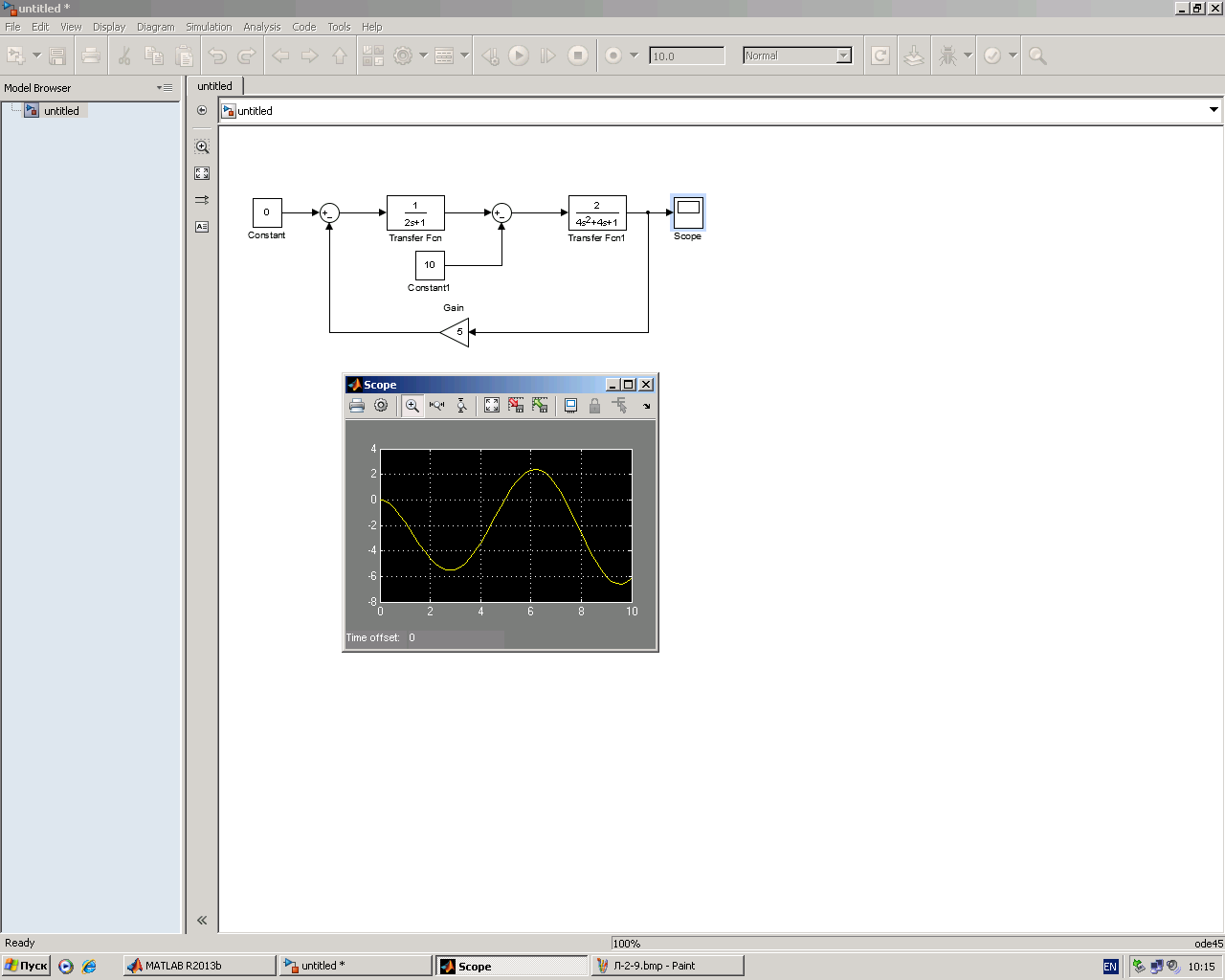
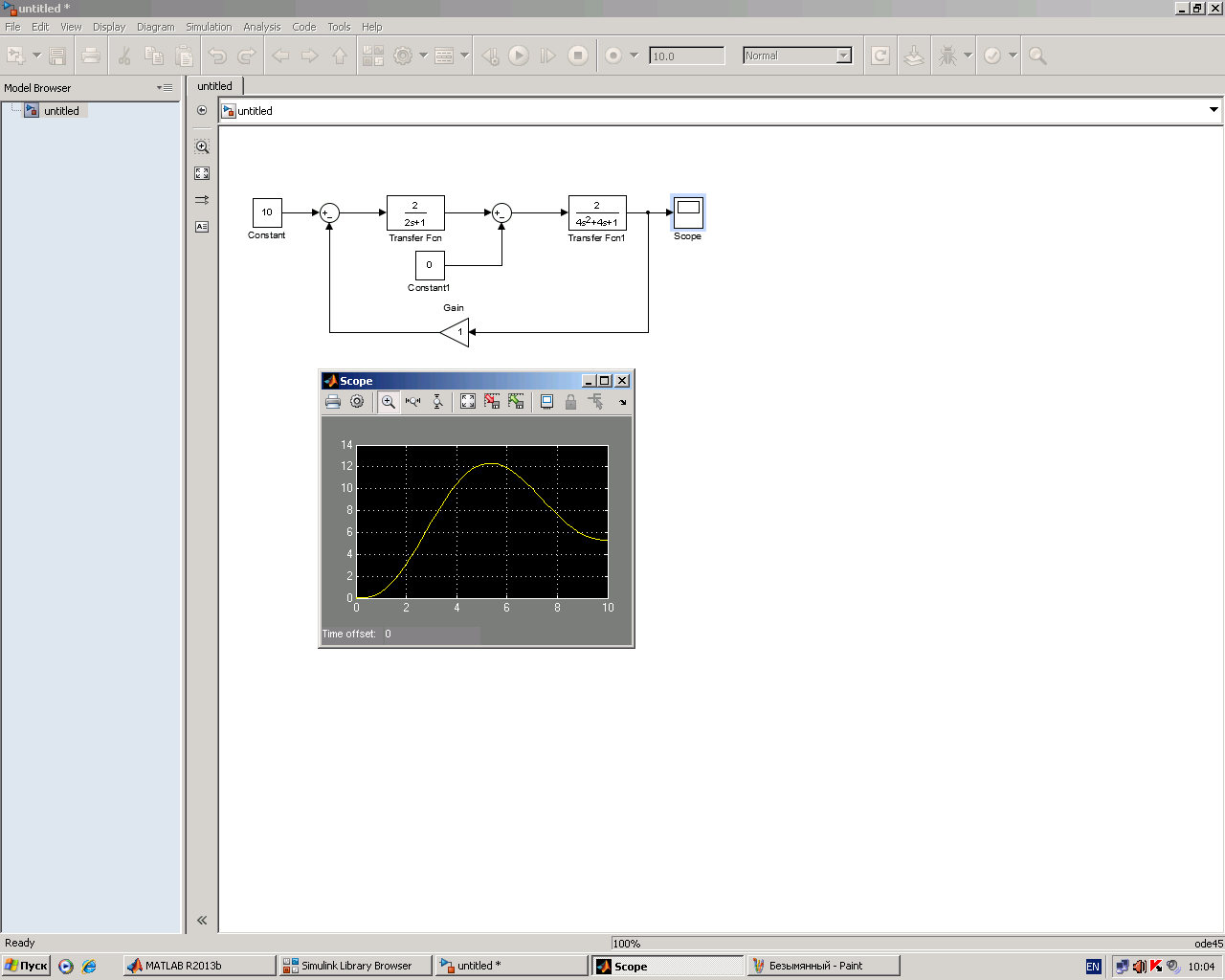
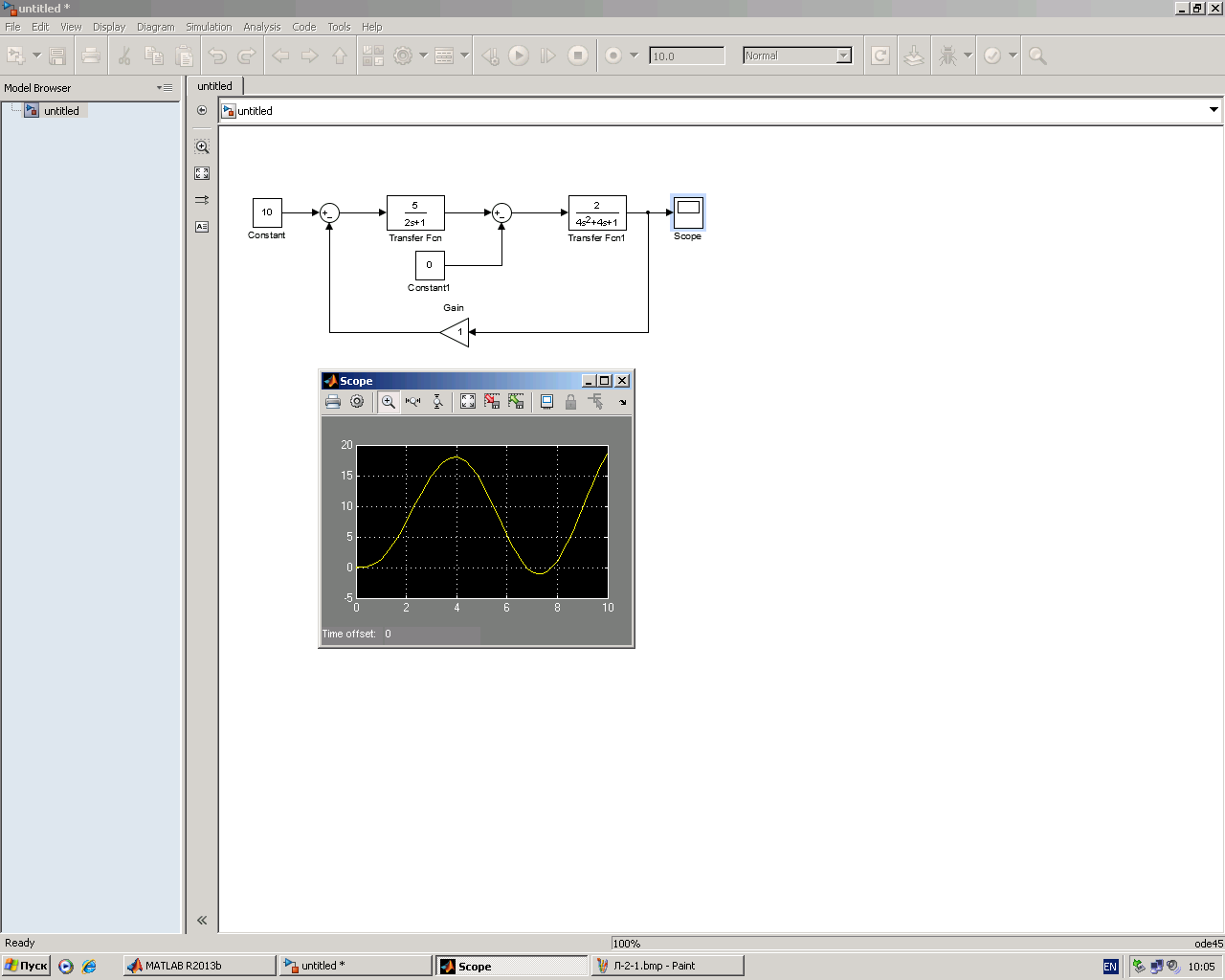
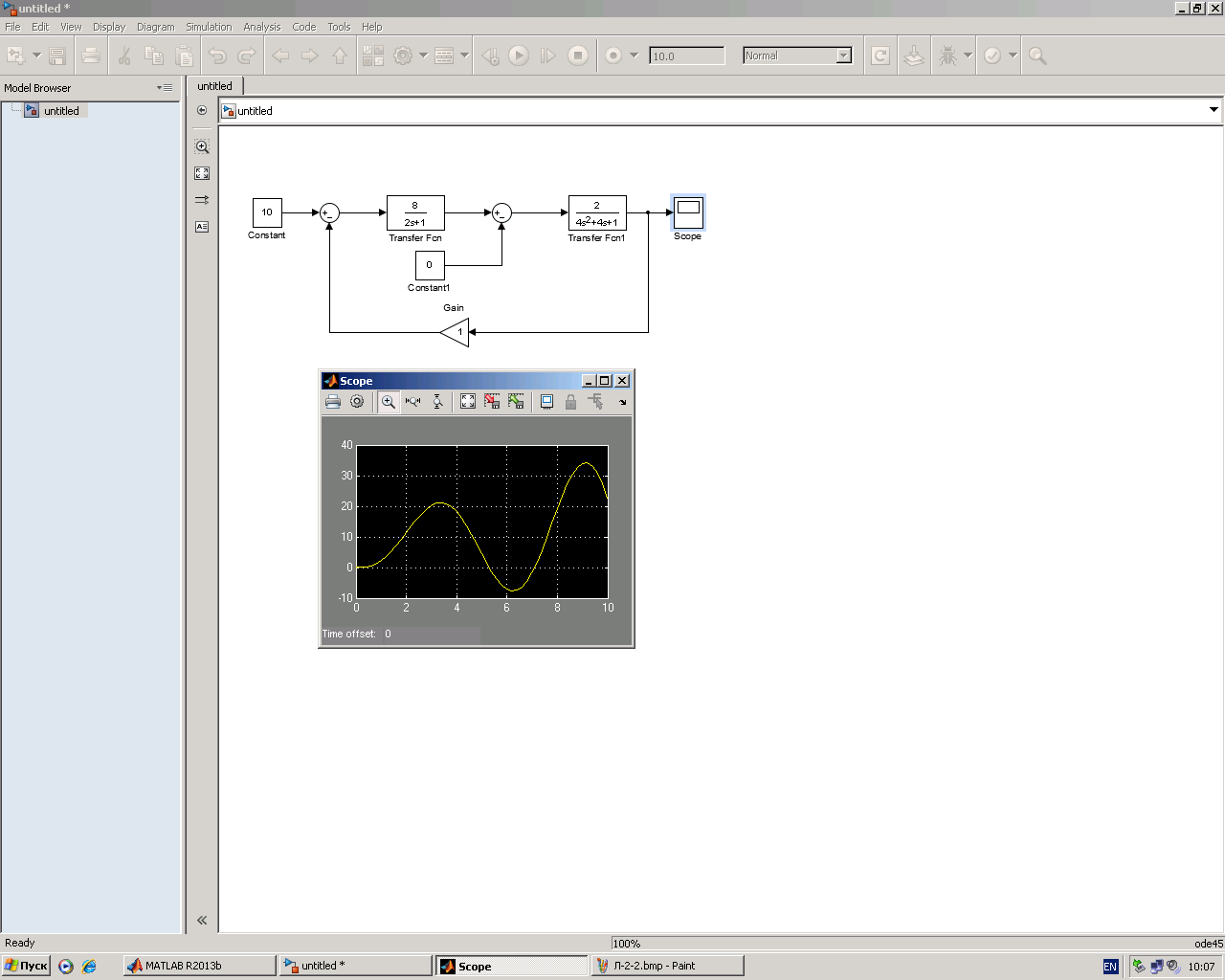
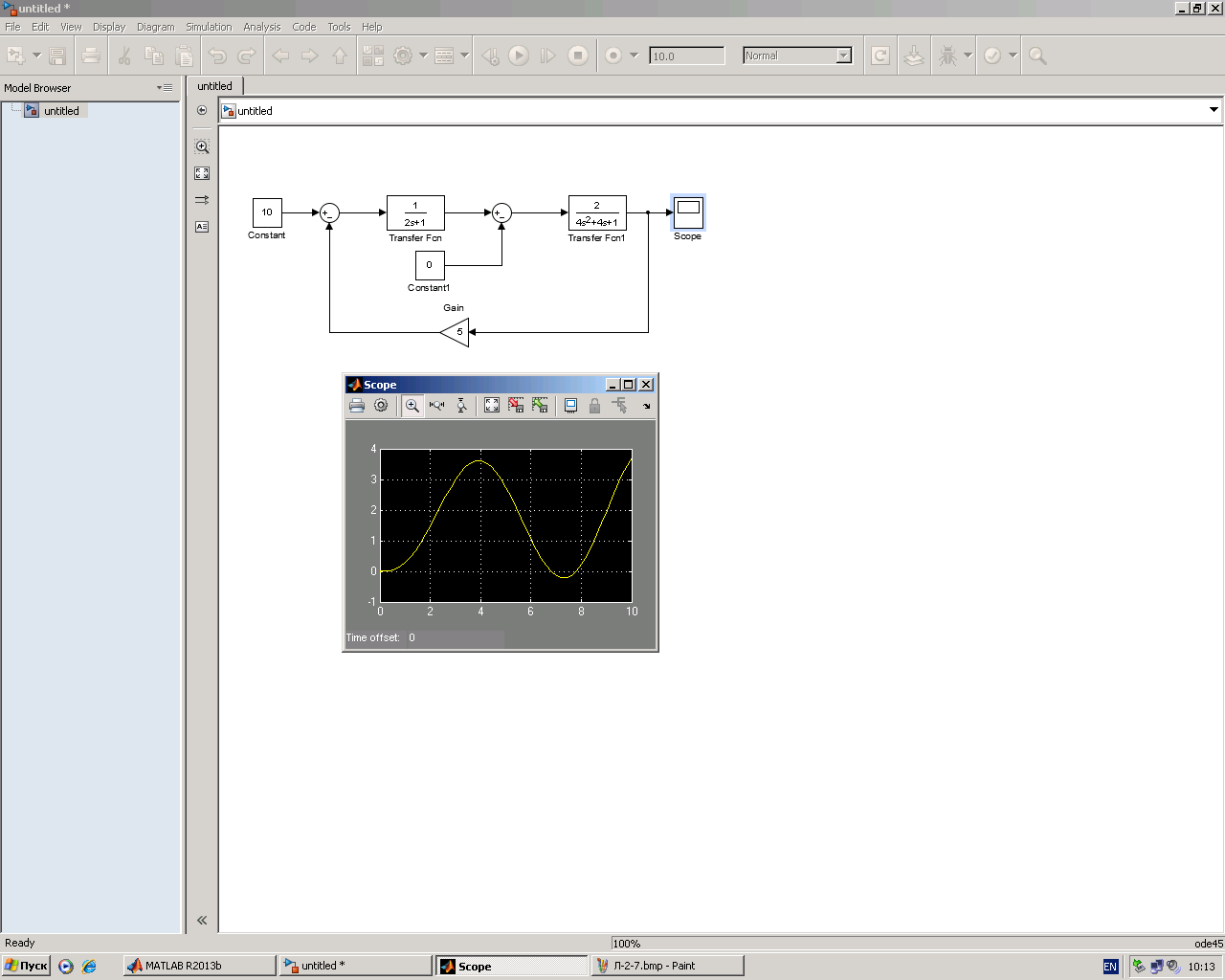
2.3.1 2.5 сурет бойынша Simulink/Matlab бағдарламасында сұлбаны жинау(№1 зертханалық жұмысқа қараңыз).
Кос=1;
Iс=0
кезінде Кп=2;
5; 8 мәндерінде
 өтпелі процесті алу. U3=10В
(түрлендіргіш, қозғалтқыш, жылдамдық
датчикін №1лабораториялық жұмыыстағы
1.2 кестеден алыныз) қою керек..
өтпелі процесті алу. U3=10В
(түрлендіргіш, қозғалтқыш, жылдамдық
датчикін №1лабораториялық жұмыыстағы
1.2 кестеден алыныз) қою керек..
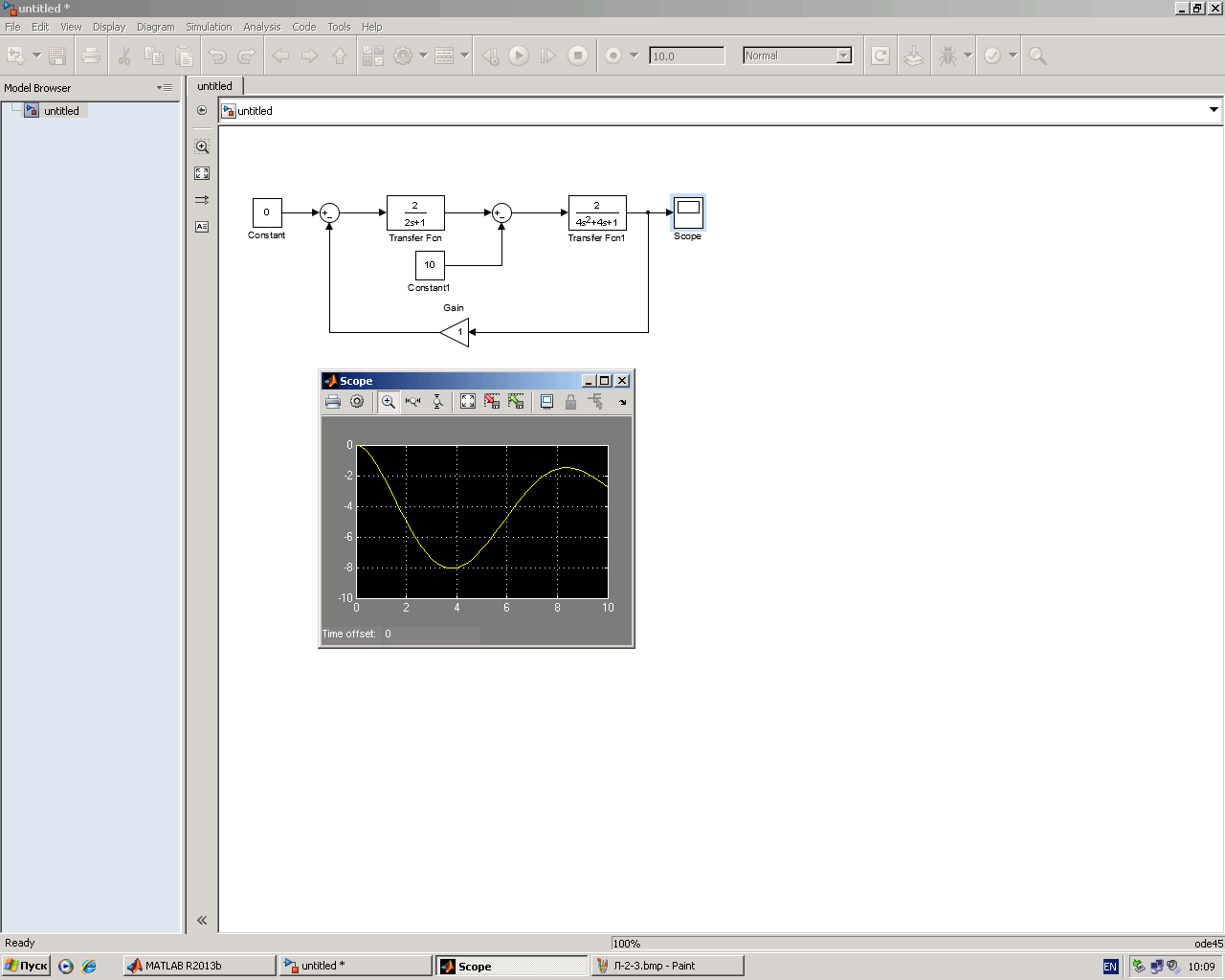
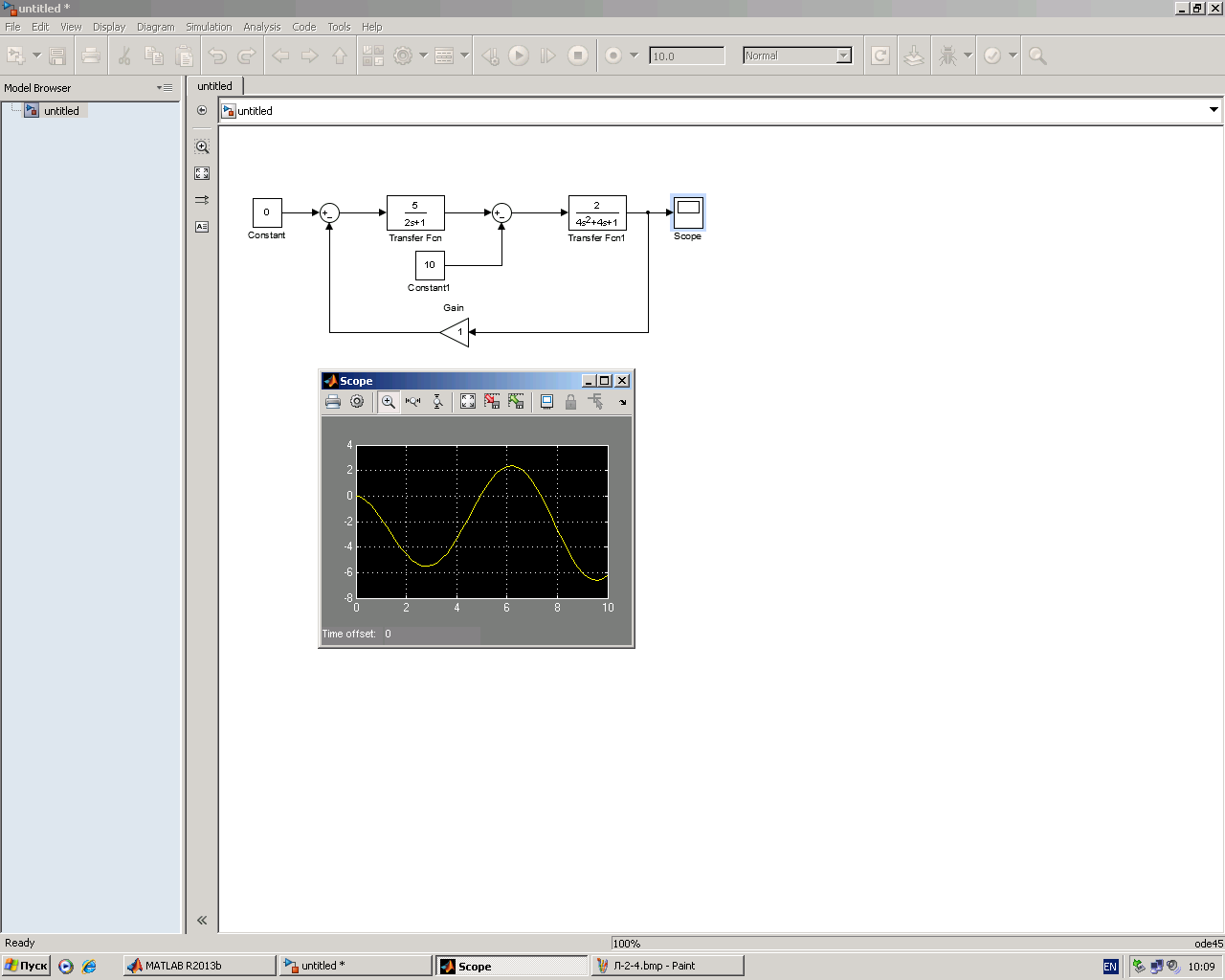
U3=0; Iс=10 кезінде Кп=2; 5; 8 үшін возмущающего әсер ету (жүктеме) қатысты өтпелі процесті алу.
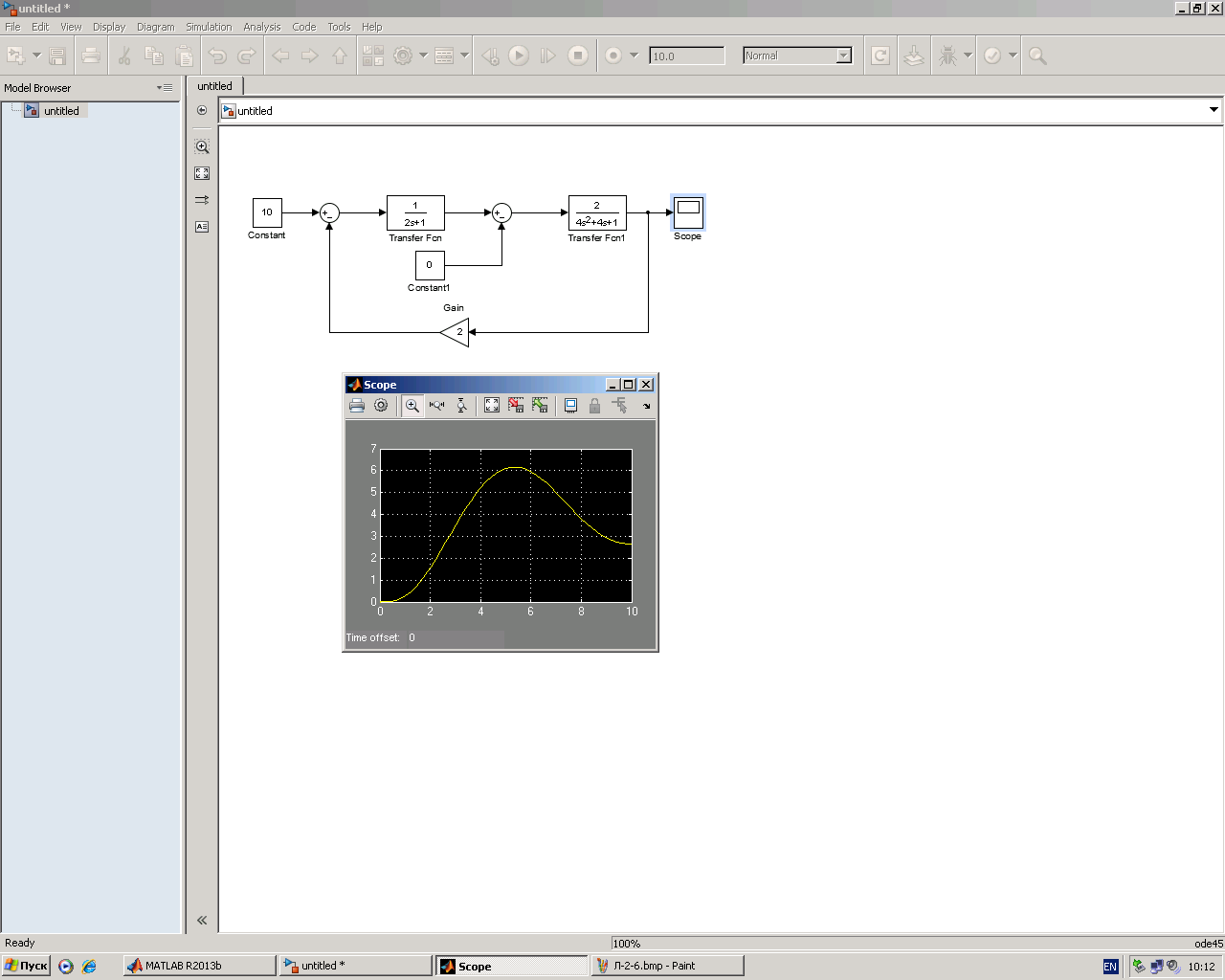
2.3.3, 2.3.4 пункттерін Кп=1 қоя отыра, Кос (мысалы Кос=2;5) мәндерін өзгертеміз.
2.3.3 пунктін қайталаймыз және фазалы жазықтықтағы қозғалысын қараймыз.
Жұмысты орындау үшін әдістемелік нұсқау
Matlab
бағдарламасын пайдалану бой\ынша
әдістемелік нұсқау алдыңғы зертханалық
жұмыстан қараңыз. Блок сұлба 2.5 суретте
көрсетілген. 
Сурет 2.5
2.5 Зертханалық жұмыс бойынша есеп беруге талаптар
Зертханалық жұмыс бойынша жұмыс тақырыбы, мақсаты, буындардың сұлбасы, жұмыс бағдарламасына сай алынған тәжңрибе нәтижелері, қорытынды болу керек.
1-Бөлім
2-Бөлім

3-Бөлім
4-Бөлім