

57.Рабочие характеристики.
Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1коэффициента полезного действия ɳ и cosφ1, от полезной мощности Р2= Рmxпри номинальных значениях напряжения U1и частоты f1(рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2= 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cosφ1асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
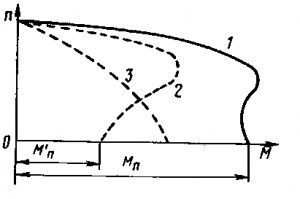 Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
 Рис.
264. Рабочие характеристики асинхронного
двигателя
Рис.
264. Рабочие характеристики асинхронного
двигателя
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
58. Динамическое торможение асинхронного двигателя.
Торможение асинхронного двигателя
При использовании асинхронного двигателя, в качестве составной части какого-либо электропривода, часто возникает потребность в искусственной остановке двигателя. В настоящее время существует множество различных способовторможения асинхронного двигателя, вот один из них.
Динамическое (электродинамическое) торможение

Если отключить двигатель от сети переменного тока и подключить его к источнику постоянного тока, то произойдет динамическое торможение. Обмотка статора, при протекании постоянного тока, создаст неподвижное магнитное поле. При вращении в таком поле, в роторе будет наводиться ЭДС, под действием которой будет протекать ток. Этот ток будет взаимодействовать с неподвижным полем статора и создавать тормозной момент, который будет направлен против направления вращения ротора. В итоге двигатель будет постепенно останавливаться, причем скорость его остановки будет зависеть от силы постоянного тока, протекающего по статору, ну и конечно же от запасенной кинетической энергии электропривода. Эта энергия, преобразовываясь в электрическую, рассеивается в виде тепла на роторе.
В двигателе с фазным ротором, величину тормозного момента, а следовательно, скорость торможения, можно изменять, изменяя величину добавочных сопротивлений в цепи ротора.