

Из произвольной точки О, выбранной на оси х, под углом ϕо, равным начальной фазе коле-
бания, откладывается вектор А, модуль которого равен амплитуде рассматриваемого колебания. Этот вектор вращают относительно оси, проходящей через точку О с угловой скоростью ωо, равной циклической частоте колебаний.
S = Прнаосьх А= Smax cos(ω0t +ϕ0 ) . |
(2.7) |
Проекция конца вектора А будет перемещаться по оси х и принимать значения от + А до
–А, а колеблющаяся величина S будет изменятся с течением времени по закону:
S = Acos(ω0t +ϕ0 ) .
Т.е. гармоническое колебание можно представить проекцией на некоторую произвольно выбранную ось вектора амплитуды А, отложенного из некоторой произвольной точки О под углом ϕо, и вращающегося со скоростью ωо вокруг этой оси.
Другой способ – представим колеблющуюся величину комплексным числом, по формуле Эйлера:
eiα = cosα +i sinα , |
(2.8) |
где i =  −1 – мнимая единица/
−1 – мнимая единица/
Любое комплексное число z = p eiα ; p = x2 + y2 ; tg α = y / x , где ρ – модуль комплексного
числа. |
|
Тогда уравнение (1.1) запишем в комплексном виде: |
|
S = Ae i( ω0 t + ϕ0 ) . |
(2.9) |
В декартовой системе координат действительная часть комплексного числа откладывается по оси абсцисс, а мнимая по оси ординат.
Вещественная часть выражения (2.7)
Re(S ) = Acos(ω0t +ϕ0 ) = S ' .
или |
|
|
|
|
|
|
~ |
i( ω |
0 |
t + ϕ |
0 |
) |
. |
S = Ae |
|
|
|
(2.10)
(2.9)
В теории колебаний принимается, что колеблющаяся величина S равна вещественной части комплексного выражения, стоящего в этом равенстве (2.8) справа.
Вопросы для повторения
1.Что такое: колебания, свободные колебания, гармонические колебания?
2.Дайте определения: амплитуды, фазы, начальной фазы, периода, частоты, циклической частоты колебания.
3.Какова связь амплитуды и фазы смещения, скорости и ускорения при гармонических прямолинейных колебаниях?
4.От чего зависят амплитуда и начальная фаза гармонических колебаний?
§3. Энергия механических гармонических колебаний
Пусть материальная точка совершает прямолинейные гармонические колебания вдоль оси координат х около положения равновесия, принятого за начало координат.
Тогда
6
x = Acos(ω0t +ϕ0 ) .
По определению
V = dxdt = −Aω0 sin(ω0t +ϕ0 ) ,
a = dV |
= d 2 x |
= −Aω02 cos(ω0t +ϕ0 ) = −ω02 x . |
dt |
dt 2 |
|
А по второму закону Ньютона:
F = ma , и Fmax= mamax, тогда с учетом (3.3) получаем:
F = −mAω02 cos(ω0t +ϕ0 ) = −mω02 x .
(3.1)
(3.2)
(3.3)
(3.4)
Сила пропорциональна смещению материальной точки из положения равновесия и направлена в противоположную сторону (к положению равновесия ).
Fmax = −mAω02 . |
(3.5) |
Запишем выражения для кинетической, потенциальной и полной энергии материальной точ-
ки.
По определению |
|
|
|
|
|
|
|
|
|||
|
|
|
W = |
mV 2 |
= |
mA2ω2 sin 2 |
(ω |
t +ϕ |
) |
. |
(3.6) |
|
|
|
|
0 |
0 |
0 |
|
||||
|
|
|
|
|
|
||||||
|
|
|
к |
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Т.к. F |
= |
dWp |
, то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x |
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
W =−x Fdx=−x |
−mω2 xdx= |
mω02 x2 |
= |
mA2ω02 x2 cos2 (ω02t +ϕ0) |
. |
(3.7) |
||
|
|
|||||||
p |
∫ |
∫ |
0 |
2 |
2 |
|
||
0 |
0 |
|
|
|
||||
Но W = Wк + Wp , тогда
W = |
mA2 |
ω2 |
|
|
|
0 |
, |
(3.8) |
|
2 |
|
|||
|
|
|
|
т. к. m = const, ωо = const, A = const, то следует вывод:
Вывод: Полная энергия остаётся постоянной, так как при гармоническом колебании справедлив закон сохранении механической энергии и упругая сила консервативна.
§4. Гармонический осциллятор. Колебания пружинного, физического и ма- тематического маятников
Система, совершающая колебания, описываемые уравнением вида:
|
2 |
S = 0 |
(4.1) |
S |
+ω0 |
называется гармоническим осциллятором.
Колебания гармонического осциллятора являются важным примером периодического движения и служат точкой или приближенной моделью во многих задачах классической и квантовой физики.
Примером гармонического осциллятора являются: пружинный, физический, математический маятники, колебательный контур (для токов и напряжений столь малых, что элементы контура можно считать линейными).
7

1. Колебания пружинного маятника
Пружинный маятник – груз массой m, подвешенный на абсолютно упругой пружине и совершающий гармонические колебания под действием упругой силы : F = – kx, где k – жесткость пружины, х – смещение груза от положения равновесия.
Получим дифференциальное уравнение гармонического колебания пружинного маятника:
F = ma = mx
и
|
F = – kx , |
|
||
тогда |
|
|
|
|
mx + kx = 0 |
(4.2) |
|||
x + kx |
= 0 |
(4.2′) |
||
|
|
m |
|
|
Сравнив (4.2’) и (4.1) |
|
|
|
|
|
k |
=ω02 , |
(4.3) |
|
|
m |
|||
|
|
|
|
|
тогда |
|
|
|
|
ω |
= |
k , |
(4.4) |
|
0 |
|
m |
|
|
|
|
|
|
|
отсюда, учитывая, что ωо=2π/Т, получим: |
|
|
|
|
T = 2π |
m |
(4.5) |
||
|
|
|
k |
|
период колебаний пружинного маятника.
Формула (4.5) выполняется для упругих колебаний, когда справедлив закон Гука, т.е. когда
mпр << mтела.
Wp = |
kx |
2 |
2 |
(4.6) |
|
|
|
потенциальная энергия пружинного маятника.
Fупр=-dWp/dx; -Wp= -kxdx => Wp=kx2/2
Fт.упр консервативная сила, тогда
dA = - dWp;
dW |
=−x |
(−kx)dx,W |
= x |
(−kx)dx = kx2 |
. |
p |
∫ |
p |
∫ |
2 |
|
|
0 |
|
0 |
|
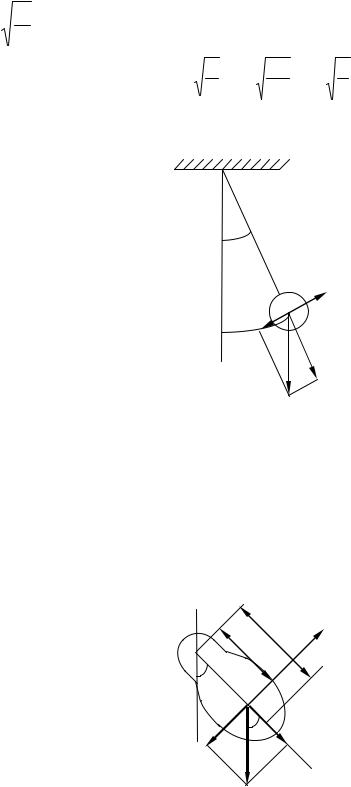
2. Колебания математического маятника
Идеализированная система, состоящая из математической точки массы m подвешенной на нерастяжимой невесомой нити и колеблющаяся под действием силы тяжести.
Пример: небольшой тяжелый шарик, подвешенный на тонкой длинной нити. mgG = N + FB , где N - сила реакции нити на натяжении.
угол ϕ - мал.
х- путь, пройденный шариком.
х= l ϕ или ϕ = х / l ; тогда Fв = - mgx / l
8
Но ωо = |
k |
, а Fупр = – kx , тогда mgx / l = kx k = mg / l |
|||||
|
m |
|
|
|
|
|
|
|
|
T = 2π |
m |
= 2π |
ml |
= 2π |
l |
|
|
|
k |
|
mg |
|
g |
x +ω02 x = 0 ,
дифференциальное уравнение г.к. математического маятника.
ϕ l
х
_
Fв
_
mg
(4.6)
(4.7)
Рис. 4.1. Колебания математического маятника
3. Колебания физического маятника
Физическим маятником называется твердое тело, совершающее колебания под действием силы тяжести вокруг неподвижной горизонтальной оси, не проходящей через центр масс С тела.
OC = l, OO′= L
|
1 |
L |
х |
0 |
|
||
|
|
|
|
α |
|
|
|
_ |
α |
|
_ |
Fr |
|
||
|
|
|
Fn |
_
mg
Рис.4.2. Колебания физического маятника
Если маятник отклонен из положения равновесия на угол α, то уравнение динамики вращательного движения твердого тела можно записать так:
М = Jε; ε = α; M = Fr l
Вектор возвращающей силы Fr противонаправлен с положительным направлением оси x.
9