

Работа блока бгмк-2.
При работе обоих гироагрегатов комплектации ТКС-П2 в режиме ГПК сигналы гиромагнитного курса выдает блок гиромагнитного курса БГМК-2. Блок, получая сигналы магнитного курса от индукционного датчика ИД-3 через коррекционный механизм КМ-5 и сигналы гироскопического курса от одного из гироагрегатов, производит осреднение значений магнитного курса по сигналам гироскопического курса.
В случае работы одного из гироагрегатов в режиме МК блок БГМК-2 работает как повторитель значений курса этого гироагрегата.
При работе системы в режиме ГПК и положении переключателя «Потребители» пульта управления на отметке «Осн.», обмотка статора сельсина-приемника Ml блока БГМК-2 через контакты блока реле РБ-2 подключены к статорной обмотке сельсина-датчика основного гироагрегата.
При включении режима магнитной коррекции основного гироагрегата (на ПУ-11 переключатель «Коррекция» установлен в положение «Осн.», а переключатель — в положение «МК»).
При включении магнитной коррекции контрольного гироагрегата потребители сигналов гиромагнитного курса остаются подключенными к статорной обмотке сельсина-датчика блока БГМК-2 и во время коррекции контрольного гироагрегата получают сигналы гиромагнитного курса относительно «запомненного» магнитного меридиана (так как коррекция сельсина от коррекционного механизма не производится).
Блок дистанционной коррекции БДК-1
Блок БДК-1 предназначен для ручного ввода поправок в сигнал текущего курса, поступающий от основного или контрольного гироагрегата (в зависимости от положения переключателя «Потребители» на ПУ-11) на навигационное вычислительное устройство НВУ-Б3.
Поправка к курсу на БДК-1 вводится только в случае отсутствия возможности коррекции НВУ-Б3 по данным системы РСБН-2СА.
Поправка устанавливается кремальерой двумя стрелками: малой стрелкой по шкале грубого отсчета от 0 до 170 через 10, большой стрелкой по шкале точного отсчета от 0 до 10 через 2 угловые минуты.
Принцип действия устройств агрегатов курсовой системы
Агрегаты курсовой системы соединяются между собой электрически в соответствии с электрической схемой кабельных разводок. Монтаж и размещение агрегатов системы осуществляется в соответствии с требованиями, изложенными в разделе «Требования к монтажу и размещению агрегатов курсовой системы на самолёте», и требованиями, указанными в паспортах на отдельные приборы и систему в целом.
Принцип действия и конструктивное устройство отдельных агрегатов системы приводятся ниже.
1. Индукционный датчик ид-3. Основные технические данные.
Погрешность датчика в рабочем диапазоне температур при горизонтальной
составляющей напряжённости магнитного поля Земли 0,17э . . . . . . . . . . . . . . . . .не более ± 20
Питание переменным током:
напряжение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1,5В ± 0,1В
частота. . . . . . . . …... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400Гц ± 2%
Индукционный датчик, внешний вид, которого приведён на рис. 10, служит для измерения направления горизонтальной составляющей магнитного поля Земли и, следовательно определения магнитного курса самолёта, необходимого для коррекции показаний гироагрегата курсовой системы в азимуте.
Чувствительным элементом датчика ИД-3 служат три магнитных зонда (рис. 8), закреплённых на основании и расположенных друг относительно друга под углом 600.
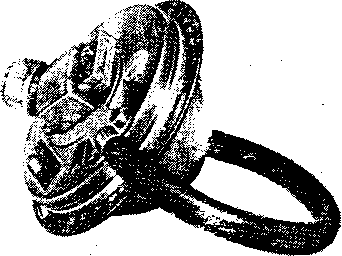
Рис. 10. Индукционный датчик ИД-3.
Применение индукционного чувствительного элемента для измерения магнитного курса взамен ранее применявшегося в компасах постоянного магнита позволяет избавиться от моментов трения, возникающих в опорах магнитной системы из-за наличия в конструкции токопроводов (коллекторов со щётками) и, следовательно, позволяет получать высокую чувствительность при малых величинах горизонтальной составляющей магнитного поля Земли (до Н=0,06 Э).