

НИРС Андреев / 140600.68_СДМ.Ф.4_Инжиниринг электроприводов и систем автоматизации. ч2
.pdfПриведем количественные результаты анализа гармонического состава тока питающей сети в специализированном программном пакете
Excel/VBA с графиками изменения формы тока и напряжения питающей сети в двигательном и генераторном режимах (рис. 3.11), тока и напряжения на звене постоянного тока ПЧ в двигательном и генераторном режимах (рис.
3.12), а также диаграммы, отражающие гармонический состав тока питающей сети (в % от основной гармоники) в двигательном и генераторном режимах (рис. 3.13).
Двигательный режим: Iс(1) = 145,5 А — амплитудное значение первой гармоники тока питающей сети во вторичной обмотке трансформатора; cosφ(1) = 0,963 — коэффициент мощности первой гармоники; ICΣ= 153,2 А — среднеквадратичное значение тока питающей сети во вторичной обмотке трансформатора; Кф2 = 7,2 — коэффициент искажения формы тока питающей сети во вторичной обмотке трансформатора; Kф = 2 % —
коэффициент искажения формы тока питающей сети в первичной обмотке трансформатора.
Генераторный режим: IС(1)= 152 А — амплитудное значение первой гармоники тока питающей сети во вторичной обмотке трансформатора; cosφ(1)
= 0,796 — коэффициент мощности первой гармоники; IсΣ= 162,5 А — среднеквадратичное значение тока

Рис. 3.12. Изменение тока ( / ) и напряжения (2) звена постоянного тока в двигательном (а) и
генераторном (б) режимах.
Рис. 3.13. Гармоники тока питающей сети в процентах от основной гармоники в двигательном (а) и
генераторном (б) режимах
питающей сети в вторичной обмотке трансформатора; Kф2 = 8,6 —
коэффициент искажения формы тока питающей сети в вторичной обмотке трансформатора; Кф1 = 2,4 % — коэффициент искажения формы тока питающей сети в первичной обмотке трансформатора; α = 141,3° — угол открытия тиристоров модуля выпрямления/рекуперации.
Следует заметить, что ток нагрузки в звене постоянного тока в генераторном режиме ниже, чем в двигательном, вследствие влияния КПД двигателя и инвертора. Однако значение основной гармоники тока питающей сети в генераторном режиме больше, чем в двигательном, так как коэффициент мощности cosφ(1) в генераторном режиме меньше, чем в двигательном (угол открытия тиристоров модуля рекуперации β≠0). Данный

факт обусловлен также применением повышающего автотрансформатора.
Несмотря на большую индуктивность питающей сети Lc в генераторном режиме наблюдаются более высокие гармоники тока из-за неблагоприятного влияния угла β модуля выпрямления рекуперации.
3. Расчет и выбор электроприводов непрерывного действия без рекуперации энергии торможения в электросеть
Режимы разгона и торможения. Если в режиме работы механизма с большим моментом инерции, требуется выполнение высокодинамичного разгона/торможения, следует учитывать изменение момента,
обусловленного инерционностью механизма, т.е. при разгоне необходимо обеспечивать дополнительный динамический момент. Согласно основному уравнению движения электропривода требуемый суммарный момент складывается из статического и динамического моментов. Режим разгона/торможения механизма определяется типом нагрузки. Если момент нагрузки (сопротивления) приводов насосов и вентиляторов определяется выражением Мс-Мс.maх(n/nmах)2, то при постоянном моменте двигателя (т.е. при разгоне с контролем ограничения тока при постоянном потокосцеплении двигателя) время его разгона от нулевой до максимальной скорости nmах (об/мин) можно рассчитать по формуле
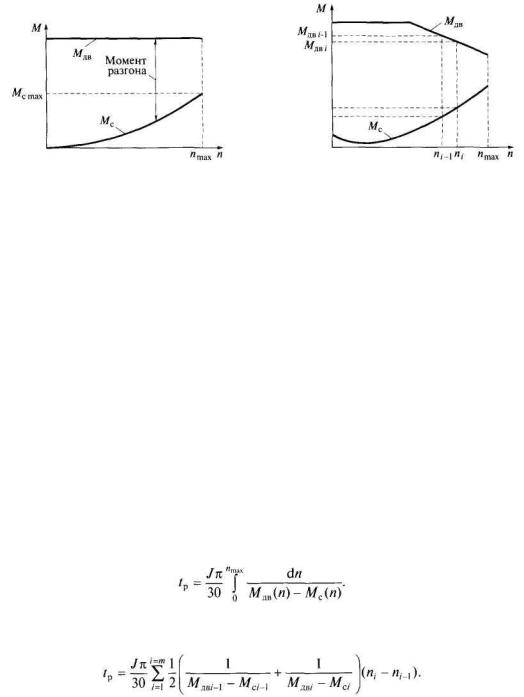
Рис. 3.14. Изменение моментов двига- |
Рис. 3.15. Пример разбиения на отрезки |
теля Mдв и нагрузки Мс при разгоне |
характеристик моментов двигателя Mдв и |
|
нагрузки Mс |
где J — сумма момента инерции нагрузки и механических передач,
приведенных к валу двигателя, и момента инерции ротора двигателя, кгм2.
Момент, требуемый для разгона механизма, определяется разностью моментов двигателя и нагрузки (рис. 3.14). По окончании разгона, т.е. при скорости nmах, моменты двигателя и нагрузки сравниваются. Ускорение при разгоне тем выше, чем больше отношение Мдв/Мс.mах и чем ниже суммарный момент инерции системы.
Если зависимость момента нагрузки от частоты вращения отличается
Разбив данную функцию на т отрезков, можно
от квадратичной или момент двигателя не остается постоянным в период разгона, то время разгона
Для вычисления данного выражения необходимо иметь значения моментов двигателя Мдв и нагрузки Мс, представленные в табличном виде.
Для примера рассчитаем время разгона привода вентилятора.
Пример 3.2. Вентилятор, оснащенный редуктором с коэффициентом передачи i = 1/3, требуется разогнать до скорости nmах=
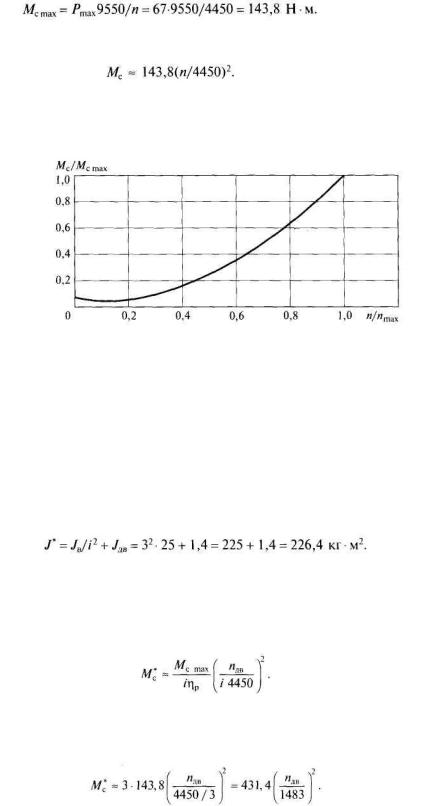
4450 мин"1. Мощность, потребляемая вентилятором на максимальной скорости, Ртax = 67 кВт. Механическая характеристика вентилятора приведена на рис. 3.16, а его момент инерции Jв = 25 кгм2.
Таким образом характеристику момента нагрузки
Максимальный момент нагрузки
Рис. 3.16. Механическая характеристика вентилятора
По известному моменту инерции вентилятора выберем двигатель мощностью 75 кВт, имеющий следующие номинальные данные: MДВ.НОМ = 484Н м ; nдв.ном= 1480 мин-1; Iдв.ном =134 А; Jдв=1,4 кг м2.
Суммарный момент инерции, приведенный к валу двигателя,
Характеристика момента нагрузки вентилятора, приведенного к двигателю, имеет следующий вид:
Полагая КПД редуктора ηр = 1, получим

Для управления вентилятором требуется преобразователь частоты с следующими номинальными данными: Pпчном = 90 кВт; Iпчном= 186 А.
Ток двигателя во время разгона должен соответствовать номинальному длительному току преобразователя частоты. Таким образом,
максимальный допустимый момент двигателя
где IДВmах= Iпчном= 186 А, а ток намагничивания двигателя Iμдв = 0,35Iдв.ном.
Следовательно,
Время разгона вентилятора до nmах = 4450 мин-1
Расчет и выбор тормозных резисторов в системах без
рекуперации энергии в электросеть. Для осуществления остановки или
снижения скорости приводов в генераторном режиме используются блоки
рекуперации тормозной энергии в питающую сеть либо блоки торможения
свстроенными или внешними тормозными резисторами. Использование модулей рекуперации энергии в сеть экономически оправдано для индивидуальных или многодвигательных приводов общей мощностью свыше 150...200 кВт, работающих в генераторном режиме с определенной цикличностью. При малых значениях времени цикла — общей мощностью свыше 200 кВт. В большинстве же случаев применяются блоки торможения
свстроенными или внешними тормозными резисторами.
Тормозные резисторы предлагаются производителями преобразовательной техники в качестве дополнительной комплектации к преобразователям частоты и выбираются исходя из конкретных параметров режима торможения по каталожным данным. Основными параметрами,
служащими для выбора тормозных резисторов, являются: номинальное сопротивление, продолжительность включения в процентах от общего времени рабочего цикла Т, пиковая мощность торможения Рт mах в течение определенного времени, мощность торможения в продолжительном режиме
РТ.ДЛИТ и температура окружающей среды. Некоторые производители указывают нагрузочную способность тормозного резистора в процентах от номинального момента конкретного привода при определенных параметрах рабочего цикла.
В общем случае пиковая мощность тормозного резистора рассчитывается по формуле PTmax= U2в max/R, где U2в max — порог срабатывания тормозного прерывателя преобразователя частоты (либо прерывателя внешнего тормозного модуля); R — сопротивление резистора. Как правило,
табличные данные пиковой, номинальной или продолжительной мощности тормозного резистора указываются производителями для конкретных преобразователей частоты с учетом порога срабатывания тормозного прерывателя, настроенного по умолчанию. Однако в некоторых случаях значение порога срабатывания может настраиваться пользователем.
Соответственно снижение данного порога влечет за собой уменьшение допустимой пиковой мощности торможения.
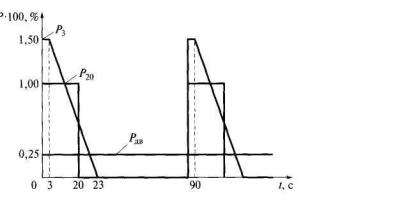
Например, параметры тормозных резисторов для приводов серии
Simovert VC указываются из расчета цикличности торможения 90 с (рис.
Рис. 3.17. Диаграммы изменения нагрузки при торможении привода с использованием внешнего
тормозного резистора
3.17). Величина Р20 характеризует допустимую (номинальную) мощность торможения в течение 20 с с цикличностью 90 с, Р3 - максимальную
(пиковую) мощность торможения в течение 3 с с последующим ее линейным снижением в
течение 20 с, а Рдв — это максимально допустимая длительная мощность торможения. При этом Р20 = 4Рдв; Р3 = 6РДВ.
При выборе тормозного резистора необходимо учитывать цикличность и параметры режима торможения привода. Порядок действий при выборе тормозного резистора следующий.
1.Построить диаграмму изменения мощности торможения в течение рабо
чего цикла привода PT=f(t).
2.Рассчитать среднее значение мощности торможения РT ср в
течение рабо чего цикла.
3.Выбрать тормозное сопротивление из условия P20 > 4РТ ср.
4.Определить максимальную (пиковую) мощность торможения Рт.mах
ипроверить выполнение условия РT тах< 1,5 Р20- Если условие не выполняется,
необходимо выбрать тормозной резистор большей мощности.
Если реальное время цикла не равно 90 с, процедура выбора тормозного резистора сводится к построению диаграммы изменения мощности торможения в течение рабочего цикла и выбору на ней отрезка времени T= 90 с, где значение РТ.ср максимально. Дальнейшие действия в соответствии с пунктами 3 и 4 описанной методики.
Для определения максимальной мощности торможения при проверке условия Рт мах< 1,5 Р20 необходимо рассматривать всю область построенной диаграммы. Если торможение привода происходит нерегулярно и случается при остановке привода, методика выбора тормозного резистора аналогична методике, применяемой для времени цикла, отличного от 90 с.
Для определения мощности торможения при остановке необходимо
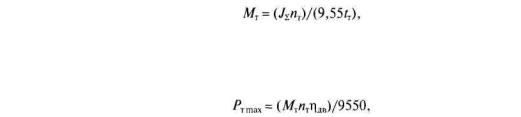
рассчитать:
где JΣ — суммарный момент инерции вала двигателя и нагрузки, приведенной к валу двигателя, кгм2; пТ — скорость
момент торможения привода, Н м,
где ηдв — КПД двигателя;
среднее значение мощности торможения, кВт,
Pт.ср =Pтmах/2.
Мощность тормозного резистора можно определить на основе
полученных значений средней и максимальной мощностей торможения.
Для примера рассмотрим расчет режима торможения привода
вентилятора.
Пример 3.3. Привод вентилятора должен тормозиться с максимальной частоты вращения nmax= 1500 мин-1 до полной остановки с помощью существующего тормозного резистора. Предполагается, что нагрузка имеет
квадратичную зависимость момента от частоты вращения.
Данные системы электропривода следующие: номинальная мощность четырехполюсного двигателя Рдв.ном = 250 кВт; номинальный ток двигателя
Iдв.ном = 430 А; номинальный момент двигателя Мдв.ном = 1600 Н • м;
максимальная частота вращения вентилятора nmах = 1500 мин-1; потребляемая нагрузкой при nmах мощность Ртaх = 198 кВт; момент инерции вентилятора Jв = 223 кгм2; момент инерции вала двигателя Jдв = = 3,6 кгм2; КПД двигателя ηдв = 0,962; номинальная мощность преобразователя частоты Рпчном = 250 кВт; номинальная мощность внешнего тормозного резистора Р20 = 100 кВт; пиковая мощность торможения Ртmах = 1,5Р20 = 150 кВт;
длительная мощность торможения Рт.длит = 25 кВт. |
|
|
||
Для |
оптимального |
использования |
тормозного |
резистора |
целесообразно осуществлять |
торможение |
с постоянным |
темпом |
|
замедления, так как в случае торможения с постоянным тормозным моментом в течение одного и того же времени будет генерироваться большая пиковая мощность торможения. При оптимизации использования тормозного резистора необходимо учитывать пиковую мощность и энергию торможения, т.е. их значения должны оставаться в пределах допустимых.
1. Расчет режима торможения с постоянным темпом замедления.
Найдем пиковую мощность торможения для тормозного резистора. Момент двигателя при торможении
Таким образом,
Соответственно мощность двигателя в тормозном режиме
Максимальная мощность двигателя в тормозном режиме достигается
при
и определяется выражением
Минимально возможное время торможения определяется заданной пиковой мощностью торможения Рт.mах с учетом Pдв.т.mаx=Рт.mах/η дв т.е. минимальное время торможения
2. Расчет энергии, выделяемой при торможении. Целью расчета