НИРС Андреев / 140600.68_СДМ.Ф.4_Инжиниринг электроприводов и систем автоматизации. ч2
.pdfне менее 3 м;
кабели связи прокладываются в заземленной с обоих концов трубе;
шина РЕ должна быть соединена с арматурой, корпус трансформатора должен быть заземлен;
трубы и кабели заземляются с обеих сторон;
корпус каждого двигателя постоянного тока должен быть заземлен недалеко от двигателя, возможно также заземление корпуса на шину РЕ в шкафу электропривода;
каждый двигатель переменного тока должен быть заземлен на расстоянии не более 6 м от двигателя, обязательно заземление корпуса на шину РЕ в шкафу электропривода;
корпусы оборудования системы управления должны быть соединены с петлей цехового заземления на расстоянии не более 6 м;
для получения наименьшего сопротивления рекомендуется прокладывать одну шину ТЕ в нескольких соединенных щитах;
кабель между датчиком скорости и преобразователем прокладывается в за-
земленной с обеих сторон трубе, экран кабеля подключается к шине ТЕ только со стороны преобразователя;
в случае большого числа щитов рекомендуется соединять все шины РЕ.
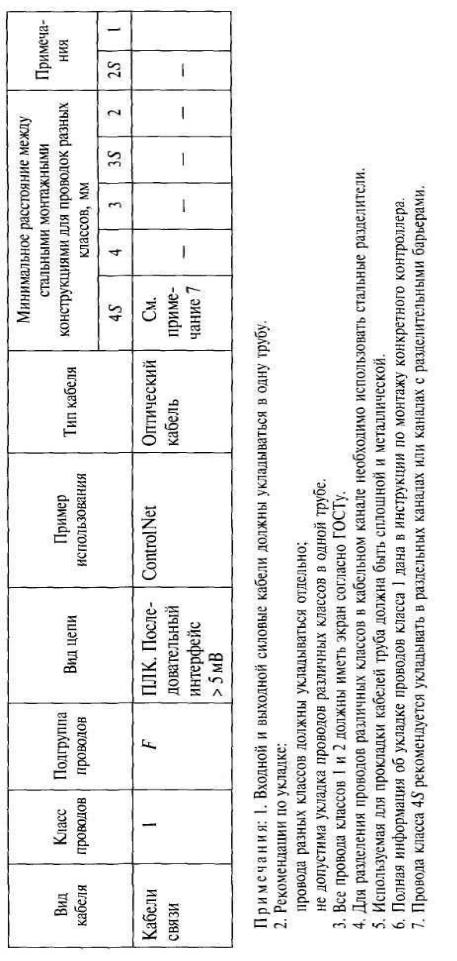
Классификация проводок, используемых в схемах силовых цепей и цепей управления комплектных электроприводов, приведена в табл. 4.1.
Общие требования:
стальные трубы, входящие в шкаф, должны быть надежно изолированы для предотвращения попадания в него воздуха и воды;
для алюминиевых труб применимы те же рекомендации по укладке, что и для стальных;
экраны кабелей класса 2, идущих от шкафа управления к внешним устрой-
ствам, соединяются только со стороны этих устройств, а экраны кабелей, идущих из одного шкафа в другой, соединяются с обеих сторон. Кабельные разъемы должны иметь хороший электрический контакт с экраном кабеля по всей его длине;
подключение силового питания асинхронного двигателя от преобразователя частоты рекомендуется выполнять экранированным кабелем. Рекомендуемая металлическая оплѐтка – рифлѐный алюминий (наилучший вариант), сплетѐнный алюминий или сплетѐнная сталь.
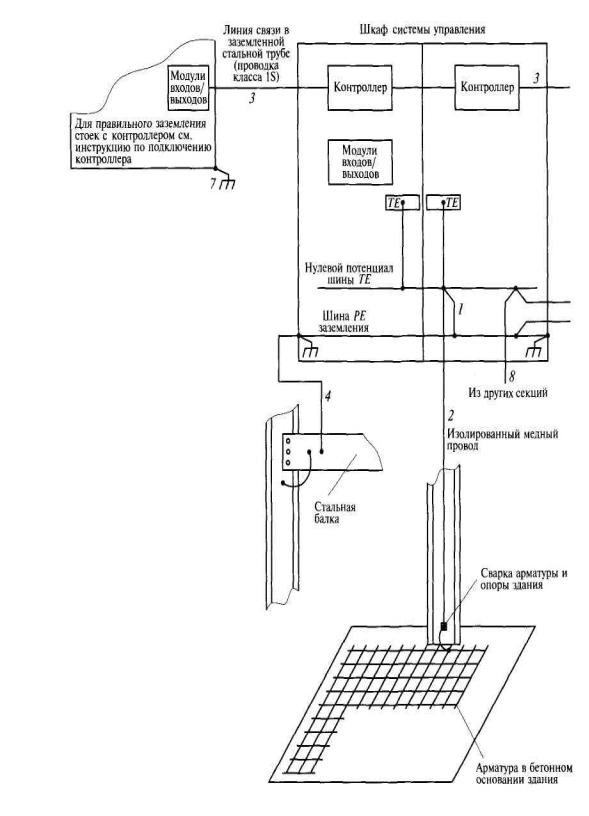
Рис. 4.1. Общая схема подключения силовых и слаботочных проводников в системе
электропривода.

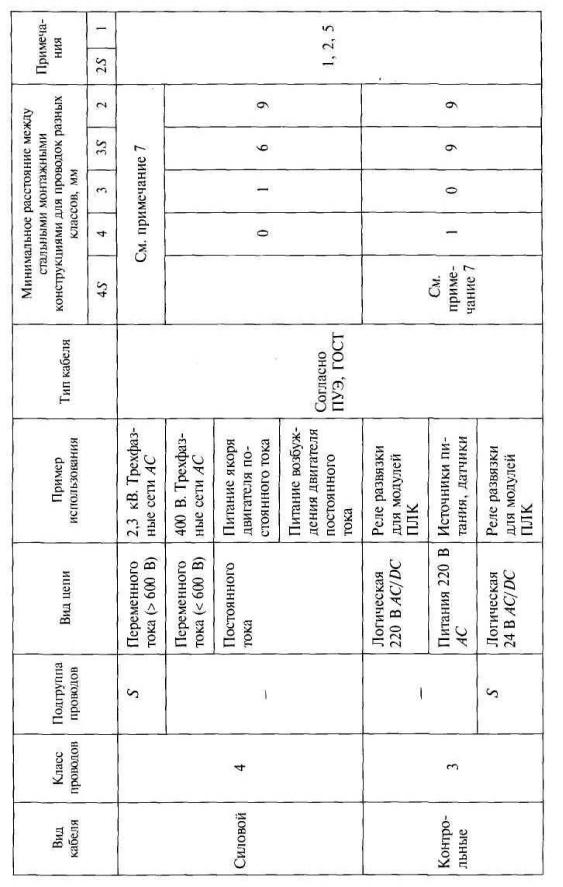
Таблица 4.1
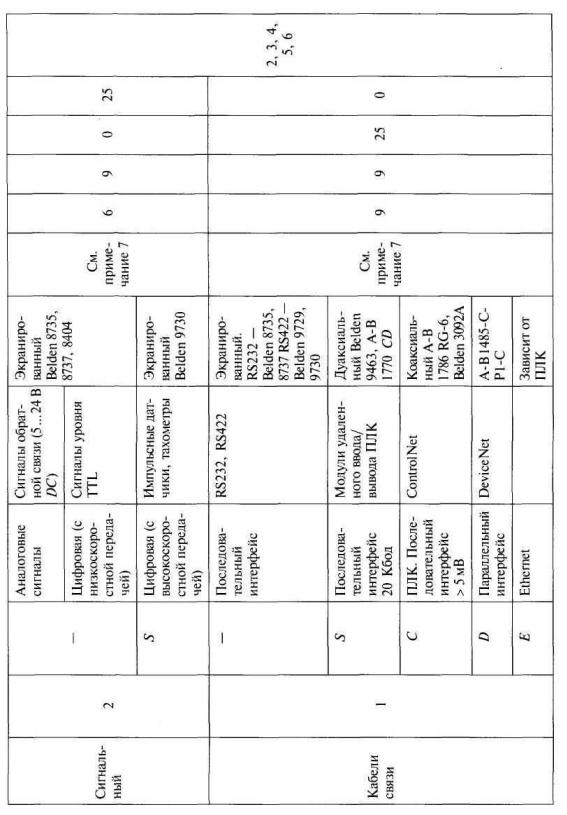
Окончание табл. 4.1
Лекция 5. Технические средства систем автоматизированных ЭП.
1.Управляющие и сетевые средства электроприводов.
2.Датчики в системах электропривода.
3.Низковольтные комплектные устройства.
Литература: Учебное пособие, часть 2, стр. 137-146.
1.Управляющие и сетевые средства электроприводов
Алгоритмы управления электромагнитными и механическими переменными в системах комплектных электроприводов реализуются на базе как встроенных в электропривод, так и внешних модулей и блоков управления — про-
граммируемых контроллеров, средств приема и передачи информации.
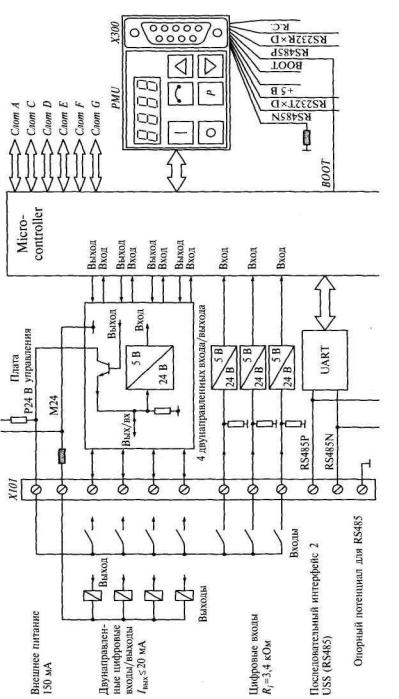
Модули контроля и управления в составе комплектных электроприводов представлены базовыми платами управления электроприводов с встроенным программным обеспечением, позволяющим конфигурировать различные структуры управления электромагнитными и механическими переменными в зависимости от прикладных задач, решаемых комплектным электроприводом.
Платы управления электроприводов содержат определенный набор дискретных и аналоговых входов/выходов, интерфейсов для связи с другими приводами,
датчиками и системами автоматизации верхнего уровня. Базовые функции плат управления могут быть расширены за счет установки дополнительных прикладных карт связи и управления, а также использования внешних программируемых контроллеров. Функциональность базового программного обеспечения и производительность микропроцессорной системы управления электропривода зависят от сферы его применения, которая определяется фирмой-
производителем при выпуске определенной серии преобразователей. Например,
преобразователи частоты Simovert VC используются при требовании высоких
точности и динамики регулирования. Базовая плата управления преобразователя
CUVC содержит разъем для подключения импульсного датчика скорости, четыре двунаправленных цифровых входа/ выхода, три цифровых входа, два аналоговых входа и два аналоговых выхода (рис. 5.1).
Предусмотрена установка в преобразователе до шести дополнительных карт расширения, в том числе технологических плат Т100, ТЗОО, Т400 с модулями программного обеспечения, адаптированного для решения конкретных задач. В
базовом программном обеспечении платы управления предусмотрены блоки,
которые могут быть запрограммированы пользователем с помощью системы
BICO-параметрирования (Binector/Connector). Таким образом увеличивается адаптивность преобразователя к требованиям пользователя. Информация между функциональными блоками системы управления передается с помощью коннекторов, которые представляют собой 16 и 32-битные сигналы, или бинекторов, по сути являющихся теми же коннекторами, но для передачи логических сигналов. Возможно написание программ обработки данных сигналов с помощью библиотеки из 240 свободных функциональных блоков, доступных в базовом программном обеспечении. В качестве свободных блоков доступны следующие:
общего назначения (фиксированные задания, блоки индикации,
преобразовательные и диагностические блоки);
арифметические и управляющие блоки (сумматоры, умножители, делители,
генераторы абсолютного значения, фильтры, инверторы знака, ограничители,
сигнализаторы предельных значений, выбор