

НИРС Андреев / 140600.68_СДМ.Ф.4_Инжиниринг электроприводов и систем автоматизации. ч2
.pdf• преобразователи частоты неустойчивы к воздействию
коррозионно-активных сред.
Лекция №8. Программные средства автоматизированных
электроприводов
1.Библиотека программ стандартных функций управления
2.Программное обеспечение параметрирования, мониторинга и наладки электроприводов
Литература: Учебное пособие, часть 2,стр. 173-178.
1. Библиотека программ стандартных функций управления
Функции систем разомкнутого и замкнутого управления частотой враще-
ния и моментом двигателя и функции обмена данными по сетевым интерфей-
сам, диагностики и оперативного управления электроприводом реализуются в программном обеспечении преобразователей частоты с помощью функциональных блоков. Эти блоки могут параметрироваться и соединяться друг с другом в различных комбинациях посредством связующих цифровых сигналов — битов, I6или 32-разрядных слов. Назначение функциональных блоков определяют исполняемые ими функции. Блоки содержат в своей структуре входы, выходы и параметры. Микропроцессорная система управления привода производит расчет функциональных блоков в заданной последовательности за определенные временные интервалы. Параметры обеспечивают адаптацию блоков к прикладным задачам, служат для построения связей между ними с помощью цифровых сигналов и визуализации внутренних сигналов системы управления привода.
В общем случае параметры бывают изменяемыми (настроечными) и
неизменяемыми (индикационными). Каждый параметр имеет индивидуальный цифровой или буквенный идентификационный код. Некоторые параметры могут содержать индексы для хранения нескольких вариантов настроек.
Обязательными атрибутами параметра являются также значение настройки по умолчанию (заводская установка) и диапазон настройки/индикации.
Примерами настроечных параметров функционального блока являются нормирование входного сигнала, темп разгона/торможения в блоке генератора темпа изменения задания частоты (задатчика интенсивности), коэффициенты пропорциональной и интегральной составляющих ПИ-регулятора частоты и т.д.
Пользовательское меню преобразователя частоты для удобства настройки и диагностики разбивается на функциональные группы — подпункты, в которые входят параметры, относящиеся к взаимосвязанным функциональным блокам. В качестве примера можно назвать группы настройки преобразователя, двигателя, дискретных и аналоговых входов/выходов, технологических функций, формирования задания,
диагностики неисправностей, обмена данными по встроенным сетевым протоколам и т.д.
Производители поставляют преобразователи с исходными (заводскими)
установками параметров, содержащими некоторые базовые настройки.
Изменения, внесенные в настройки параметров, всегда можно отменить,
вернувшись к заводским установкам.
Для быстрого ввода в эксплуатацию преобразователя можно выполнить его упрощенную параметризацию, что допустимо для простых применений,
когда условия работы привода четко определены и не требуется проведения его тестирования под нагрузкой с детальной настройкой параметров.
Процедура быстрой параметризации включает в себя установку параметров,
определяющих номинальные данные двигателя (его тип, частоту и напряжение питания, ток, мощность, cosφ , КПД, частоту вращения вала, ток намагничива-
ния, тип охлаждения), тип нагрузки на валу (с постоянным или переменным
моментом), допустимую перегрузочную способность, источники подачи сиг-
налов задания и команд управления, ограничения выходной частоты преоб-
разователя (минимальное и максимальное значения), темпы разгона и тормо-
жения, выбор алгоритма управления частотой или моментом (скалярное, век-
торное с датчиком скорости или без датчика).
Если условия работы преобразователя заранее не определены и его настройка осуществляется непосредственно при пуске приводного механизма,
требуется выполнение детальной параметризации. Назовем основные ее шаги.
Настройка силовой части — запись в определенный параметр системы управления привода кода, соответствующего конкретному заказному номеру силовой части преобразователя, что необходимо в случае замены платы управления или перестановки ее на другой силовой блок.
Настройка дополнительных плат и опций — осуществление конфигура-
ции и настройки дополнительных плат расширения и обмена данными по стандартным сетевым протоколам.
Настройка преобразователя — указание реального значения напряжения на входе преобразователя, номинальных данных двигателя и датчика скорости
(при его наличии), алгоритма управления частотой или моментом, частоты коммутации ШИМ инвертора, нормирующих значений для сигналов тока,
напряжения, частоты, частоты вращения и момента. Для режима одновременной работы преобразователя на группу двигателей в параметре,
определяющем номинальный ток двигателя, указывается сумма номинальных токов всех двигателей. Номинальный ток намагничивания двигателя, как правило, неизвестен, и его значение рассчитывается автоматически при введении номинальных данных двигателя. Для точного определения параметров двигателя необходимо выполнить процедуру его идентификации,
т.е. определить параметры эквивалентной схемы замещения асинхронного двигателя (активные составляющие сопротивлений статора и ротора,
индуктивности рассеяния статора и ротора, взаимную индуктивность),
активную составляющую сопротивления кабеля двигателя, падение
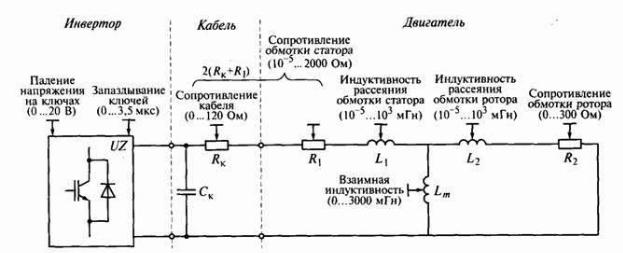
напряжения на IGBT-модулях и время запаздывания при подаче открывающих импульсов на IGBT-модули. Например, точное определение активного сопротивления обмотки статора существенно влияет на устойчивость системы векторного управления с датчиком обратной связи по скорости; также оно необходимо в режиме скалярного управления с увеличением выходного напряжения инвертора в области низких частот. Настраиваемые параметры показаны на эквивалентной схеме замещения системы ПЧ—АД (рис. 3.33).
Рис. 3.33. Настроечные параметры эквивалентной схемы замещения системы ПЧ—
АД
Помимо параметров эквивалентной схемы замещения при идентификации можно определить характеристику намагничивания двигателя,
что позволит улучшить динамику привода. Характеристика должна сниматься при работе
системы ПЧ—АД в области ослабления поля (с выходной частотой более
50 Гц), особенно в режиме векторного управления.
Дальнейшая настройка привода подразумевает адаптацию параметров преобразователя к типу нагрузки на валу двигателя. Для настройки высокоточных приводов, как правило, предусмотрены функциональные
параметры (макро-конфигурации), определяющие в зависимости от типа нагрузки на валу двигателя базовые настройки набора параметров,
отвечающих за динамические свойства привода.
Например, при настройке приводов серии Simovert VC можно выбрать базовые макроконфигурации для следующих стандартных применений:
-стандартные приводы (насосы, вентиляторы);
-механизмы с упругими связями, редукторами и большим моментом инерции (например, бумагоделательные машины);
-механизмы, работающие в режиме резких ускорений/замедлений с постоянным моментом инерции (например, летучие ножницы);
-механизмы, режим работы которых характеризуется резкими набросами нагрузки (для диапазона регулирования частоты не более 1:5);
-механизмы с мягкой рабочей характеристикой в области низких частот
(при регулировании скорости с импульсным датчиком с большим числом импульсов на оборот);
-механизмы с высоким пусковым моментом (тяжелым пуском);
-механизмы с высокой динамикой в области ослабления поля (например,
приводы испытательных стендов).
Приведенные макроконфигурации определяют настройки ряда парамет-
ров, существенно влияющих на динамические характеристики привода:
коэффициента (βp регулятора скорости, зависящего от суммарного момента инерции привода;
постоянной времени интегрирования τр регулятора скорости,
определяющей точность поддержания заданной скорости и перерегулирование переходного процесса по скорости;
фильтрации сигнала измеренной скорости, используемой только в замкнутых системах регулирования скорости или момента привода при наличии импульсных помех в сигнале скорости;
оптимизации поддержания момента, компенсирующей влияние дискретности цифровой замкнутой системы регулирования скорости и
повышающей точность поддержания момента при разгоне. При этом сигнал измеренной скорости подвергается дифференцированию. Для использования этой функции в сигнале датчика скорости не должно быть помех,
обусловливающих возникновение колебаний в замкнутой системе;
темпа нарастания сигнала задания активной составляющей тока статора i1β, снижение значения которого приводит к повышению динамики контура регулирования тока статора в области ослабления потокосцепления (при работе на частотах выше 50 Гц), а увеличение — снижает перерегулирование активной составляющей тока статора при резких бросках момента;
динамического момента — настройкой этого параметра обеспечивается дополнительный динамический момент в области низких частот при работе без датчика обратной связи, который задействуется в режимах ускорения/замедления;
фильтрации сигнала измеренного напряжения звена постоянного тока,
снижение значения которого приводит к повышению динамики контура регулирования напряжения на звене постоянного тока;
задания потокосцепления двигателя относительно номинального значения в диапазоне частот от 0 до 50 Гц;
оптимизации работы при неполной нагрузке привода, позволяющей сни-
зить потери в стали статора двигателя за счет задания снижения потокосцеп-
ления пропорционально снижению нагрузки на валу;
фильтрации сигнала задания потокосцепления двигателя,
обеспечивающей устойчивость контура регулирования потокосцепления в режиме оптимизации при частичной загрузке и в области частот выше номинальной;
компенсации запаздывания срабатывания ключей инвертора,
позволяющей компенсировать колебания момента в диапазоне частот выше 10
Гц.
Оптимизация настроек привода проводится вручную с использованием дальнейшей подстройки этих и ряда других параметров в соответствии с
индивидуальными требованиями в каждом конкретном случае.
Современные автоматизированные электроприводы на базе преобразователей частоты обладают дополнительными функциями,
расширяющими возможности настройки системы. Назовем наиболее распространенные из них.
Автоматический перезапуск — используется для автоматического сброса возникшей неисправности (пропадания питания) и перезапуска преобразователя.
Кинетическое буферирование — позволяет осуществлять управление двигателем при кратковременном пропадании питания за счет кинетической энергии вращения высокоинерционной нагрузки. При активации этой функции выходная частота преобразователя снижается до определенного уровня, т.е.
привод работает в генераторном режиме, принимая энергию от нагрузки. При возобновлении питания преобразователь выводит двигатель на прежнюю час-
тоту вращения.
Работа при пониженном напряжении — обеспечивает работу привода при просадках напряжения до 50 % от номинального значения. При этом соответственно ограничивается максимальный выходной ток преобразователя.
Поддержание максимального напряжения звена постоянного тока
UBmax— обеспечивает безостановочную работу привода при возникновении генераторных режимов в течение определенного времени. При этом регулирование выходной частоты преобразователя не позволяет двигателю перейти на надсинхронную частоту вращения.
Динамическое торможение — позволяет останавливать двигатель с нагрузкой за минимально возможное время, т.е. подаваемый в статорные обмотки вращающегося двигателя постоянный ток создает тормозной момент.
Однако при этом энергия торможения выделяется в обмотках двигателя, что создает опасность их перегрева при длительном процессе торможения.
Подхват на ходу — позволяет подключать к выходу преобразователя вращающийся двигатель, с которого до этого было снято силовое питание. При
этом преобразователь осуществляет поиск текущей частоты вращения двига-
теля и обеспечивает его плавный вывод на заданную частоту.
Температурная адаптация — служит для компенсации ошибки регулирования частоты вращения или момента двигателя в замкнутой системе управления, возникающей при температурных изменениях сопротивлений обмоток статора и ротора. При отсутствии встроенного датчика температуры обмоток статора расчет сопротивлений осуществляется по заложенным в преобразователь тепловой и электрической моделям двигателя.
2. Программное обеспечение параметрирования, мониторинга и
наладки электроприводов
Для параметрирования, мониторинга и наладки современных приводов переменного тока производители оборудования предлагают специальное про-
граммное обеспечение, позволяющее упростить и ускорить эти процедуры. В
качестве примера можно привести программные продукты компании Schneider
Electric.
Для всей гаммы приводной техники, выпускаемой данной компанией преобразователей частоты, устройств плавного пуска и интеллектуальных пус-
кателей — предлагаются постоянно совершенствуемые диалоговые программ-
ные средства PowerSuite. Их использование в стандартных промышленных компьютерах или миникомпьютерах позволяет осуществлять подготовку файлов данных, которые можно загружать в ПЧ или устройства плавного пуска. Программное обеспечение PowerSuite создает файлы данных,
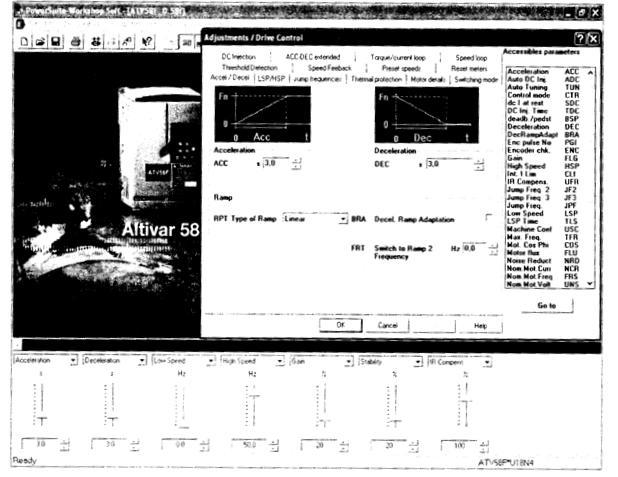
обеспечивая необходимое взаимодействие между функциями конфигурации и настройки изделия. Программное обеспечение содержит все функции встроенного или выносного терминала управления (конфигурирование или настройку приводных устройств, управление, сигнализацию и т.д.) с
пользовательским интерфейсом в среде Windows (рис. 3.34).
Связь между ПЧ и компьютером осуществляется по последовательному интерфейсу.
Программное обеспечение PowerSuite может использоваться:
автономно для подготовки и сохранения исходных файлов
конфигурации
и настройки на дискетах, CD или жестком диске;
Рис. 3.34. Диалоговое окно программного обеспечения PoworSuite для настройки
параметров преобразователи частоты
подключенным к ПЧ или пусковому устройству для конфигурирования,
настройки и управления ими;
• для пересылки файлов конфигурирования и файлов настройки от ПК к устройству, и наоборот.
PowerSuite предоставляет возможность оперативного управления приводом и осциллографирования переходных процессов при наладке.
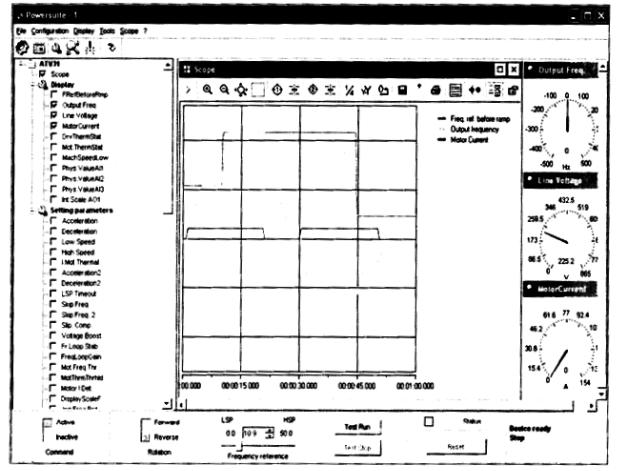
Диалоговое окно PowerSuite для управления приводом с компьютера и
осциллографирования
переходных процессов показано на рис. 3.35.
Рис. 3.35. Диалоговое окно программного обеспечения PowerSuite для управления
приводом и осцилографирования переходных процессов.
Лекция №9. Технические средства систем автоматизации