

Diss / 3
.pdfMUSIC, G-MUSIC, and
Maximum-Likelihood Performance
Breakdown
B.A. Johnson, Y.I. Abramovich, X. Mestre
Publication: |
IEEE Transactions on Signal Processing |
Vol.: |
56 |
No.: |
2 |
Date: |
Aug. 2008 |
|
|
This publication has been included here just to facilitate downloads to those people asking for personal use copies. This material may be published at copyrighted journals or conference proceedings, so personal use of the download is required. In particular, publications from IEEE have to be downloaded according to the following IEEE note:
°c 2008 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.

3944 |
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 56, NO. 8, AUGUST 2008 |
MUSIC, G-MUSIC, and Maximum-Likelihood
Performance Breakdown
Ben A. Johnson, Student Member, IEEE, Yuri I. Abramovich, Senior Member, IEEE, and
Xavier Mestre, Member, IEEE
Abstract—Direction-of-arrival estimation performance of MUSIC and maximum-likelihood estimation in the so-called “threshold” area is analyzed by means of general statistical analysis (GSA) (also known as random matrix theory). Both analytic predictions and direct Monte Carlo simulations demonstrate that the well-known MUSIC-specific “performance breakdown” is associated with the loss of resolution capability in the MUSIC pseudo-spectrum, while the sample signal subspace is still reliably separated from the actual noise subspace. Significant distinctions between (MUSIC/G-MUSIC)-specific and MLE-intrinsic causes of “performance breakdown,” as well as the role of “subspace swap” phenomena, are specified analytically and supported by simulation.
Index Terms—Array signal processing, generalized likelihoodratio tests, signal detection and estimation, G-estimation.
I. INTRODUCTION
I T has been known for a long time that when the sample support  and/or signal-to-noise ratio (SNR) on an
and/or signal-to-noise ratio (SNR) on an  -variate antenna array is insufficient, MUSIC performance “breaks down” and rapidly departs from the CRB [1], [2]. In most studies, the phenomenon blamed for such performance breakdown in subspace-based methods is the so-called subspace swap when the “measured data is better approximated by some components of the orthogonal (“noise”) subspace than by the
-variate antenna array is insufficient, MUSIC performance “breaks down” and rapidly departs from the CRB [1], [2]. In most studies, the phenomenon blamed for such performance breakdown in subspace-based methods is the so-called subspace swap when the “measured data is better approximated by some components of the orthogonal (“noise”) subspace than by the
components of the signal subspace” [3].
Analytical studies of this phenomenon usually rely upon the traditional asymptotic assumptions 










and associated perturbation analysis of a sample covariance matrix eigendecomposition (see [4] for example). While max- imum-likelihood estimation (MLE) does not require signal eigenspace to be split into “signal” and “noise” subspaces, it has been known for a long time that under certain “threshold” conditions, MLE may also experience “performance breakdown” and generate severely erroneous estimates (“outliers”) not consistent with the CRB predictions (see [5, pp. 278–286]).
Manuscript received November 16, 2006; revised January 8, 2008. The associate editor coordinating the review of this manuscript and approving it for publication was Dr. Sven Nordebo. This work was funded under DSTO/RLM R&D Collaborative Agreement 290905.
B. A. Johnson is with RLM, Pty., Ltd., Edinburgh, SA, 5111, Australia, and also with the Institute for Telecommunications Research, University of South Australia, Mawson Lakes, SA, 5095 (e-mail: ben.a.johnson@ieee.org).
Y. I. Abramovich is with the Defence Science and Technology Organisation (DSTO), ISR Division, Edinburgh SA 5111, Australia (e-mail: yuri.abramovich@dsto.defence.gov.au).
X. Mestre is with the Centre Tecnològic de Telecomunicacions de Catalunya (CTTC), Castelldefels, 08860 Barcelona, Spain (e-mail: xavier.mestre@cttc. cat).
Digital Object Identifier 10.1109/TSP.2008.921729
Historically, analytical studies of MLE “breakdown” have been performed for a single signal in noise [6]–[9], or occasionally for multiple sources [10]–[12]), but almost always relying on traditional asymptotic 









 perturbation analysis (with some notable exceptions, such as [13]). Since for a single source, MLE may be implemented via one-dimensional search (similar to MUSIC) over the traditional matched filter (beamformer) output, comparison with the MUSIC threshold condition is straightforward. For multiple sources, analysis of MLE threshold conditions is not as simple, primarily because the globally optimal ML solution often cannot be easily identified.
perturbation analysis (with some notable exceptions, such as [13]). Since for a single source, MLE may be implemented via one-dimensional search (similar to MUSIC) over the traditional matched filter (beamformer) output, comparison with the MUSIC threshold condition is straightforward. For multiple sources, analysis of MLE threshold conditions is not as simple, primarily because the globally optimal ML solution often cannot be easily identified.
Yet, recent investigations for multiple source scenarios, conducted primarily by Monte Carlo simulations [14], demonstrated a “gap” in the minimum sample support and/or SNR between the MUSIC-specific and ML-intrinsic threshold conditions. In fact, it was demonstrated that for the considered multisource scenarios, MLE breakdown occurs at a significantly lower SNR than for MUSIC. It is therefore clear that for multiple-source scenarios, different mechanisms are responsible for MLE and MUSIC “breakdowns” which have not been thoroughly investigated.
In [15] and [16], an improvement in MUSIC “threshold performance” has been derived by X. Mestre, based on recent findings of the general statistical analysis (GSA) approach (also known as random matrix theory) that considers different asymptotic conditions
constant |
(1) |
i.e., where both the array dimension  and the number of snapshots
and the number of snapshots  grow without bound, but at the same rate.
grow without bound, but at the same rate.
While it was long known that for a finite  , sample eigenvectors in the covariance matrix eigendecomposition
, sample eigenvectors in the covariance matrix eigendecomposition
(2)
are biased estimates of the true eigenvectors  , GSA methodology allowed Mestre to specify the (
, GSA methodology allowed Mestre to specify the (


 consistent) G-MUSIC function
consistent) G-MUSIC function 



 such that (under certain conditions)
such that (under certain conditions)
(3)
where 



 is the MUSIC pseudospectrum of the true covariance matrix. Specifically
is the MUSIC pseudospectrum of the true covariance matrix. Specifically
(4)
1053-587X/$25.00 © 2008 IEEE
JOHNSON et al.: MUSIC, G-MUSIC, AND ML PERFORMANCE BREAKDOWN |
3945 |
where 


 is the
is the  -variate (unity norm) array steering vector in the direction
-variate (unity norm) array steering vector in the direction  and
and 
 are the eigenvectors of the sample covariance matrix
are the eigenvectors of the sample covariance matrix  , associated with eigenvalues
, associated with eigenvalues 














 . Note that for
. Note that for 

 , the last
, the last 

 eigenvalues are zero. For the known number
eigenvalues are zero. For the known number 

 of point sources, the G-weighting function
of point sources, the G-weighting function 









 , is [16]
, is [16]
(5)
with 










 denoting the
denoting the  real valued solutions of
real valued solutions of
(6)
The weighting 


 in (4) allows the parenthesized term to be treated as the consistent (under G-asymptotics) estimate of the noise subspace
in (4) allows the parenthesized term to be treated as the consistent (under G-asymptotics) estimate of the noise subspace 

 of the actual covariance matrix
of the actual covariance matrix  (where the subspace
(where the subspace  is an
is an 





 eigenvector matrix of the individual eigenvectors
eigenvector matrix of the individual eigenvectors 









 ).
).
While Mestre demonstrated some improvement in threshold conditions with respect to conventional MUSIC, he noted that “it was rather disappointing to observe that the use of 
 -consistent estimates does not cure the breakdown effect of subspace-based techniques (in MUSIC) and it merely moves to a lower SNR” [17], indicating that G-MUSIC is not able to avoid the fundamental phenomena that separates MUSIC breakdown conditions from MLE ones. This was surprising given that the G-MUSIC derivations (3)–(6) and actual Monte Carlo simulations were conducted under conditions which “guarantee separation of the noise and first signal eigenvalue cluster of the asymptotic eigenvalue distribution of
-consistent estimates does not cure the breakdown effect of subspace-based techniques (in MUSIC) and it merely moves to a lower SNR” [17], indicating that G-MUSIC is not able to avoid the fundamental phenomena that separates MUSIC breakdown conditions from MLE ones. This was surprising given that the G-MUSIC derivations (3)–(6) and actual Monte Carlo simulations were conducted under conditions which “guarantee separation of the noise and first signal eigenvalue cluster of the asymptotic eigenvalue distribution of  ” [15]. Therefore, G-asymptotically the “subspace swap” phenomenon is precluded by these conditions, and yet MUSIC and G-MUSIC breakdown was regularly observed in the conducted Monte Carlo trials under these conditions.
” [15]. Therefore, G-asymptotically the “subspace swap” phenomenon is precluded by these conditions, and yet MUSIC and G-MUSIC breakdown was regularly observed in the conducted Monte Carlo trials under these conditions.
Clearly, the connections between “subspace swap” in MUSIC, G-MUSIC, and MLE “performance breakdown,” as well as the relevance of the GSA methodology for practically limited  and
and  values, needs to be clarified. In this paper, we introduce results of our attempts to do so. To this purpose, the paper is organized in a slightly unusual way, starting with simulation results and then examining some underlying theoretical considerations.
values, needs to be clarified. In this paper, we introduce results of our attempts to do so. To this purpose, the paper is organized in a slightly unusual way, starting with simulation results and then examining some underlying theoretical considerations.
We start in Section II with the results of Monte Carlo trials for a typical multisource scenario that on one hand illustrates significantly better MLE performance in the “threshold” area compared with MUSIC and G-MUSIC, but more importantly serves as a test-case for GSA prediction accuracy assessment.
In Section III, we derive G-asymptotic “subspace swap” conditions and compare them with results of direct Monte Carlo trials. We demonstrate that for the considered scenarios, MUSIC-specific breakdown is associated with intersubspace “leakage” (rather than full subspace swap) whereby a small portion of the true signal eigenvector resides in the sample
noise subspace (and visa-versa). In Section IV, we show that this leakage is sufficient for loss of source resolution and associated MUSIC breakdown, and demonstrate a G-asymptotic prediction of the loss of resolution.
In Section V, we demonstrate that unlike MUSIC, the MLEintrinsic breakdown is directly associated with severe “subspace swap” in the sample covariance matrix, and therefore can be quite accurately predicted (in terms of SNR and sample support) for a given scenario. This is shown with both multisource and more traditional single source scenarios. In Section VI, we summarize and conclude the paper.
II. “PERFORMANCE BREAKDOWN” IN DOA ESTIMATION:
SIMULATION RESULTS
In this section, we illustrate MUSIC, G-MUSIC and MLE performance in the threshold region (of parameters) that spans the range from “proper” MUSIC behavior (no outliers) to MLE complete “performance breakdown.” For this reason, we once again consider the scenario used in [15], [18], and [19], with a 


 -element uniform linear array (ULA),
-element uniform linear array (ULA), 


 training samples, array element spacing of
training samples, array element spacing of 





 and
and 

 independent equal power Gaussian sources (stochastic source model) located at azimuth angles
independent equal power Gaussian sources (stochastic source model) located at azimuth angles




 20
20
 10
10 35
35 37
37
 (7)
(7)
immersed in white noise, with various per-element source SNRs (ranging from 15 to  25 dB, or set to specific SNRs for more detailed investigation).
25 dB, or set to specific SNRs for more detailed investigation).
The covariance matrix  for this mixture is
for this mixture is
(8)
where the noise power is 


 ; source SNR is given by
; source SNR is given by




 , and
, and 


 is the DOA
is the DOA  -dependent
-dependent  -variate “steering” (antenna manifold) vector.
-variate “steering” (antenna manifold) vector.
The number of sources 



 in our Monte Carlo simulations are assumed to be known a priori. MUSIC and G-MUSIC algorithms are implemented as usual by selecting the
in our Monte Carlo simulations are assumed to be known a priori. MUSIC and G-MUSIC algorithms are implemented as usual by selecting the  largest maxima of the MUSIC and G-MUSIC pseudo-spectra:
largest maxima of the MUSIC and G-MUSIC pseudo-spectra:
(9)
(10)
respectively, with 


 as specified in (5)–(6).
as specified in (5)–(6).
In the Gaussian case, MLE is theoretically obtained by the selection of the single largest maxima of the multivariate likelihood function (LF) [20]
(11)
3946 |
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 56, NO. 8, AUGUST 2008 |
where  represents the parameters power
represents the parameters power 


 and angle of arrival
and angle of arrival 


 for the
for the  sources. However, since the actual global extremum of the LF cannot be guaranteed in practice, MLE performance is assessed using an MLE-proxy algorithm [14]. The essence of this algorithm is to first find a local extremum
sources. However, since the actual global extremum of the LF cannot be guaranteed in practice, MLE performance is assessed using an MLE-proxy algorithm [14]. The essence of this algorithm is to first find a local extremum  of the likelihood function
of the likelihood function 


 in the vicinity of the actual parameters
in the vicinity of the actual parameters  for every Monte Carlo trial. We then make an initial “seed” estimate of the actual parameters using MUSIC or G-MUSIC to derive the DOAs and power estimation such as in [21]. This set of DOA estimates
for every Monte Carlo trial. We then make an initial “seed” estimate of the actual parameters using MUSIC or G-MUSIC to derive the DOAs and power estimation such as in [21]. This set of DOA estimates 
 for a given trial is treated as representative of MLE performance if
for a given trial is treated as representative of MLE performance if
(12)
In the event that the likelihood threshold is not exceeded, we use an iterative process to replace the MUSIC or G-MUSIC DOA estimates one by one with univariate LF searches. As opposed to approaches that are looking only for a local extremum in vicinity of the a priori known source location, this approach may initialize the ML search with a solution that is “far away” from the true one (when a “improper” MUSIC or G-MUSIC solution is used as the initial point). It is thus able to uncover “far away” maxima with a sufficient LF value to pass the threshold in (12) (i.e., MLE breakdown). If, however, the ML search results fail to meet the threshold condition (12) via whatever ML optimization approach we have chosen, then we treat this case as a failure of the optimization search routine to find a global maxima rather than an MLE failure and discard this result. Finally, the solutions are then evaluated for DOA estimation error. This ensures that, to the extent possible, even in the presence of MLE breakdown we are evaluating the underlying MLE performance.
While use of the threshold in (12) is not a practical approach, it adopts the same clairvoyant knowledge of the true solution as does the Cramér–Rao lower bound for MLE performance assessment. Also, while outside the scope of this paper, it should be noted that there are practical versions of this MLE-proxy algorithm [22], [23] which rely on statistical invariance of a modified likelihood ratio and have a quite reasonable threshold performance compared with the “clairvoyant” MLE-proxy algorithm used here.
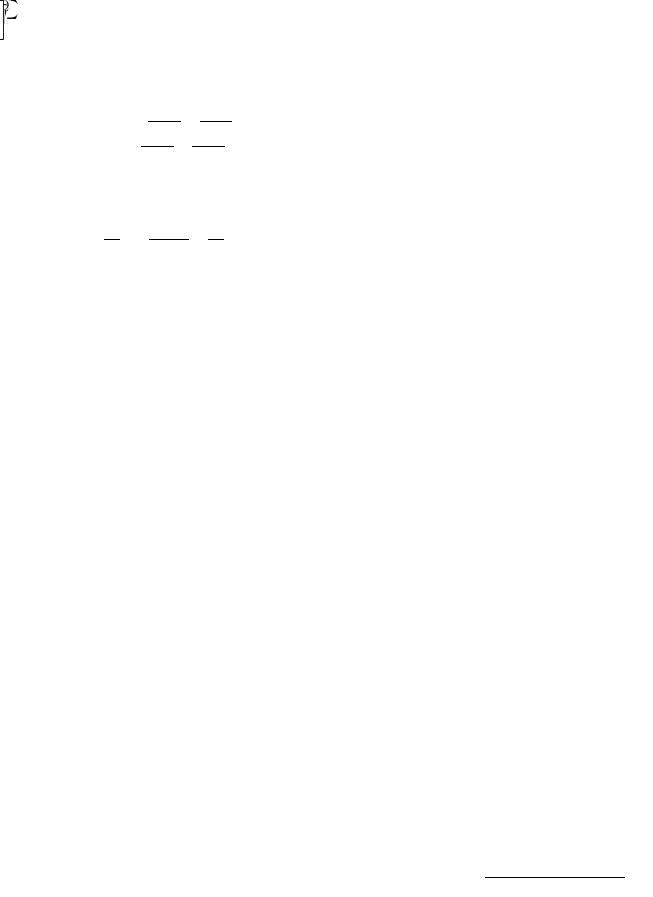
Fig. 1(a) shows the mean-square error (MSE), averaged over 300 trials, for DOA estimates of the two closely spaced sources (at 35 and 37
and 37 ). The figure demonstrates the familiar “threshold effect” in MSE for the DOA estimation process, with the sudden degradation in DOA accuracy (due to outliers) as the SNR is decreased. The MLE breakdown is demonstrated with the MLE-proxy algorithm discussed above, using two different “seeding” solutions produced by MUSIC and G-MUSIC correspondingly. Also shown is the stochastic Cramér-Rao bound (CRB) for the two sources at 35
). The figure demonstrates the familiar “threshold effect” in MSE for the DOA estimation process, with the sudden degradation in DOA accuracy (due to outliers) as the SNR is decreased. The MLE breakdown is demonstrated with the MLE-proxy algorithm discussed above, using two different “seeding” solutions produced by MUSIC and G-MUSIC correspondingly. Also shown is the stochastic Cramér-Rao bound (CRB) for the two sources at 35 and 37
and 37 (averaged together). One can observe the improvement in threshold performance delivered by G-MUSIC compared with MUSIC, as demonstrated in [15]. The improvement is more dramatic when examining the percentage of solutions that contain an outlier [Fig. 1(b)], as MUSIC deteriorates much more rapidly than G-MUSIC with decreasing SNR, but both algorithms are still outperformed by the MLE-proxy in this scenario.
(averaged together). One can observe the improvement in threshold performance delivered by G-MUSIC compared with MUSIC, as demonstrated in [15]. The improvement is more dramatic when examining the percentage of solutions that contain an outlier [Fig. 1(b)], as MUSIC deteriorates much more rapidly than G-MUSIC with decreasing SNR, but both algorithms are still outperformed by the MLE-proxy in this scenario.
Based on these introduced results, one has to conclude that for the considered multisource scenario, completely different
Fig. 1. Multiple-source estimation on a 20-element uniform linear array with training samples for MUSIC, G-MUSIC, and MLE. The SNR breakpoint (the “threshold”) decreases from around 20 dB for MUSIC to 17 dB for G-MUSIC, but is still dramatically greater than the MLE-proxy (LF-PAC) threshold observed at around 0 dB. Note that the invariance of the MLE-proxy results with respect to the “seeding” solution (MUSIC or G-MUSIC) indicates the reliable association of the results with true MLE performance in the threshold area. (a) Mean-square error. (b) Outlier production rate.
mechanisms drive (MUSIC/G-MUSIC)-specific and MLE-in- trinsic breakdown. This difference is the primary topic of our paper.
III. “SUBSPACE SWAP” AND MUSIC
“PERFORMANCE BREAKDOWN”
The subspace swap phenomenon has often been treated as the sole apparent mechanism “responsible” for performance breakdown in subspace-based techniques. This phenomenon is specified [3] as a case when the estimates of the noise subspace eigenvalues 

















 with increasing probability become larger than the estimates of the signal subspace eigenvalues
with increasing probability become larger than the estimates of the signal subspace eigenvalues 












 . “More precisely, in such a case one or more pairs in the set
. “More precisely, in such a case one or more pairs in the set 










 actually estimate noise (subspace) eigenelements instead of signal elements,” Hawkes, Nehorai and Stoica note in [24]. The fact that subspace swap is associated with MUSIC breakdown has
actually estimate noise (subspace) eigenelements instead of signal elements,” Hawkes, Nehorai and Stoica note in [24]. The fact that subspace swap is associated with MUSIC breakdown has

JOHNSON et al.: MUSIC, G-MUSIC, AND ML PERFORMANCE BREAKDOWN |
3947 |
been well demonstrated in the literature, with several (only par- |
with the noise subspace eigenvalue |
|
|
|
|
|
|
|
is sepa- |
||||||||||||||||||||||||||||||
tially) successful attempts undertaken to analytically specify the |
rated from the rest of the eigenvalue distribution (the “subspace |
||||||||||||||||||||||||||||||||||||||
threshold conditions for a given scenario. In [24], for example, |
splitting condition”) is given by |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
it was admitted that analytical predictions “grossly underesti- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
mate probability of subspace swap in and below the threshold |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(16) |
||||||||||||||
region.” This lack of complete success may be attributed to the |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
traditional |
|
constant |
|
asymptotic perturbation |
where |
denotes the minimum real-valued solution to the |
|||||||||||||||||||||||||||||||||
eigendecomposition analysis adopted for these derivations. Ac- |
|||||||||||||||||||||||||||||||||||||||
(15), considering multiplicity. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
tual breakdown is of course observed in finite |
conditions |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
If the number of samples per antenna element |
is greater |
||||||||||||||||||||||||||||||||||||||
and the scenario in (7) with |
|
is quite far from classical |
|||||||||||||||||||||||||||||||||||||
|
than the right-hand side of (16), one can ensure that signal and |
||||||||||||||||||||||||||||||||||||||
asymptotic assumptions. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
noise sample eigenvalues will be separated in the asymptotic |
||||||||||||||||||||||||||||||
Alternatives to the traditional asymptotic assumptions for the |
|||||||||||||||||||||||||||||||||||||||
sample |
eigenvalue |
distribution, |
and |
a subspace |
swap will |
||||||||||||||||||||||||||||||||||
considered type of scenarios with a limited |
|
ratio may be |
|||||||||||||||||||||||||||||||||||||
|
occur with probability zero. It turns out that whenever there is |
||||||||||||||||||||||||||||||||||||||
served by the G-asymptotic assumption (1). Yet, it could well be |
|||||||||||||||||||||||||||||||||||||||
asymptotic separation between signal and noise subspaces, one |
|||||||||||||||||||||||||||||||||||||||
that for practical (finite) |
and |
values, analytic derivations |
|||||||||||||||||||||||||||||||||||||
can effectively describe the behavior of the sample eigenvalues |
|||||||||||||||||||||||||||||||||||||||
based on this asymptotic assumption also lead to erroneous re- |
|||||||||||||||||||||||||||||||||||||||
and eigenvectors using the following |
result |
from |
[15]: Let |
||||||||||||||||||||||||||||||||||||
sults. In order to investigate this matter further, let us briefly |
|||||||||||||||||||||||||||||||||||||||
|
be independent and identically distributed (i.i.d.) |
||||||||||||||||||||||||||||||||||||||
introduce some asymptotic convergence results for the eigen- |
|
||||||||||||||||||||||||||||||||||||||
complex-valued column vectors |
from the |
-variate distri- |
|||||||||||||||||||||||||||||||||||||
values and eigenvectors of the sample covariance matrix. |
|||||||||||||||||||||||||||||||||||||||
bution with circularly symmetric complex random variables |
|||||||||||||||||||||||||||||||||||||||
The first nonobvious |
property of the |
eigenvalues |
of the |
||||||||||||||||||||||||||||||||||||
having zero mean and covariance matrix |
, that has the |
||||||||||||||||||||||||||||||||||||||
sample covariance matrix is the fact that their empirical distri- |
|||||||||||||||||||||||||||||||||||||||
following eigendecomposition |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
bution tends almost surely to a deterministic probability density |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
G-asymptotically. It turns out that this |
asymptotic |
density |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(17) |
||||||||||||
of sample eigenvalues becomes organized in clusters located |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(18) |
|||||||||||||||
around the positions of the true eigenvalues. For the covariance |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
matrix model considered here (8), one can easily identify a |
where |
|
|
|
|
|
|
|
|
|
|
|
|
are the true signal eigenvalues |
|||||||||||||||||||||||||
cluster associated with the single noise eigenvalue, and a cluster |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
and |
is the corresponding eigenvector matrix. Let the sample |
||||||||||||||||||||||||||||||||||||||
(or a set of clusters) associated with the signal subspace. The |
|||||||||||||||||||||||||||||||||||||||
matrix |
be specified as |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
number and position of these clusters depends strongly on the |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
asymptotic number of samples per antenna element that are |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(19) |
||||||||||||||
available in order to construct the sample covariance matrix. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
If the number of samples per antenna element is too low, the |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
asymptotic sample eigenvalue distribution remains in a single |
Consider the |
th signal sample eigenvector |
(assumed to be |
||||||||||||||||||||||||||||||||||||
cluster. As the number of samples per antenna is increased, |
|||||||||||||||||||||||||||||||||||||||
associated with a sample eigenvalue with multiplicity one) and |
|||||||||||||||||||||||||||||||||||||||
the asymptotic sample eigenvalue distribution breaks off into |
|||||||||||||||||||||||||||||||||||||||
a deterministic column vector . One can try to analyze the be- |
|||||||||||||||||||||||||||||||||||||||
distinct clusters, each one potentially associated with a single |
|||||||||||||||||||||||||||||||||||||||
havior of the sample eigenvector |
by studying the behavior of |
||||||||||||||||||||||||||||||||||||||
(possibly repeated) true eigenvalue. It has been shown [25] that |
|||||||||||||||||||||||||||||||||||||||
the scalar product |
|
|
|
|
|
, and relate it somehow to the deter- |
|||||||||||||||||||||||||||||||||
for the th eigenvalue |
|
|
|
|
|
|
of the |
distinct |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
ministic quantity |
|
|
|
|
|
. It turns out that, as |
|
|
at the |
||||||||||||||||||||||||
true eigenvalues |
(which |
occur |
with multiplicity |
|
) to be |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
same rate under a satisfied “eigenvalue splitting condition” (14) |
||||||||||||||||||||||||||||||||||||||
estimated (i.e., for the cluster of |
|
to be well separated from |
|||||||||||||||||||||||||||||||||||||
|
for all eigenvalues, we get |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
the neighboring |
|
|
|
|
|
clusters), that |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
where |
|
|
|
|
|
(13) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(20) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
almost surely, where the weights |
|
|
are defined as [26, The- |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(14) |
orem 2] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
for |
|
|
|
|
|
|
|
(the “eigenvalue splitting |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
condition”). The factor |
|
|
|
|
|
|
denotes the |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(21) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
real-valued solutions of |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
and where |
are the real-valued solutions to |
|
|
|
|||||||||||||||||||||
ordered as |
|
|
|
|
|
|
|
|
|
|
|
(15) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(22) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
. Specifically, the ratio of |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
the number of training samples |
to the dimension of the array |
repeated according to the multiplicity |
|
of the corresponding |
|||||||||||||||||||||||||||||||||||
necessary to guarantee that the eigenvalue cluster associated |
. This result is powerful, but allows for little interpretation. In |
||||||||||||||||||||||||||||||||||||||
3948 |
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 56, NO. 8, AUGUST 2008 |
order to simplify the analysis it is common practice to consider the particular case of the so-called “spiked population covariance matrix model.” This class of covariance matrix was introduced by Johnstone [27], and it describes the asymptotic behavior of a class of covariance matrices obtained from plane waves in noise (8). This model is essentially a particularization of the general one, based on the simplifying assumption that the contribution of the signal subspace is negligible in the asymptotic regime, in the sense that only the dimension of the noise subspace scales up with the number of antenna elements, whereas the dimension of the signal subspace remains fixed. Under this simplification of the original model (which implies letting 

 for
for  fixed in the above formulas), we see that the asymptotic subspace splitting condition in (16) becomes
fixed in the above formulas), we see that the asymptotic subspace splitting condition in (16) becomes
(23)
or, equivalently, as
we see that (using |
) |
|
|
|
|
|
|
|
|
|
|
(29)
(30)
(31)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
With all this, we are now able to investigate the behavior of |
||||||||||||||||||||
which can also be expressed as |
|
|
|
|
|
|
|
|
|
|
the weights in (21) under the spiked population model simpli- |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
fication. Indeed, let us first concentrate on the case |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(24) |
(this corresponds to the convergence of a particular signal |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sample eigenvector). Expressing the weights |
as in (32), |
|||||||||||||||||||
where |
. |
|
|
|
|
|
|
|
|
|
|
|
|
shown at the bottom of the page, and using the above limits on |
||||||||||||||||||||||
Let us now investigate the behavior of the solutions to (22) |
the |
, we obtain |
|
|||||||||||||||||||||||||||||||||
under the spiked population covariance model. Note first that |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
(22) can equivalently be written as |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(25) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(33) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Hence, one can ensure that, under the spiked population covari- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Now, let us first consider |
. By definition, we have |
ance matrix, and assuming |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, one has |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
. Hence, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
can never go to zero for any |
|
|
|
|
. Consequently, the first |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(34) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
term of (25) will go to zero as |
|
|
|
|
for a fixed , and |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
will converge to the solution of |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
where |
is a deterministic |
column vector |
with uniformly |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
(26) |
bounded norm regardless of the number of antenna elements. |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
This is precisely the result introduced by Paul [28] for the |
||||||||||||||||||||
namely, |
|
|
|
|
|
|
|
|
|
|
|
|
|
specific class of spiked population covariance matrices, where |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
again a fixed limited number of eigenvalues is greater than |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
(27) |
the smallest one, whose multiplicity grows with the number |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
of antennas. If we replace |
with an eigenvector of the true |
|||||||||||||||||||
Let us now consider the convergence of |
|
|
|
. We observe |
covariance matrix , we observe that (under the spiked pop- |
|||||||||||||||||||||||||||||||
that |
|
, so that, by examining the first term in |
ulation covariance matrix model, and assuming asymptotic |
|||||||||||||||||||||||||||||||||
(25), the only possibility is that |
|
|
|
|
|
|
|
|
|
|
subspace separation) the projection of a sample eigenvector |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
(28) |
onto the linear space spanned by an eigenvector associated with |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
a different eigenvalue converges to zero, i.e., |
|
|||||||||||||||||||||||||
(otherwise, the first term of (25) would go to zero, and we would |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
end up with the solution to (26), which is not in the interval of |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(35) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
interest). Furthermore, by expressing (25) in the following way: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
(32)
JOHNSON et al.: MUSIC, G-MUSIC, AND ML PERFORMANCE BREAKDOWN |
3949 |
In addition, Paul also studied the convergence of the sample eigenvector 
 when there is no asymptotic separation between signal and noise subspaces, namely
when there is no asymptotic separation between signal and noise subspaces, namely 








 . In particular, he established that, under the spiked population covariance matrix model
. In particular, he established that, under the spiked population covariance matrix model
(36)
almost surely as 


 at the same rate (in fact, Paul proved this for real-valued Gaussian observations with a diagonal covariance matrix, but we conjecture that the result is also valid for the observation model considered here).
at the same rate (in fact, Paul proved this for real-valued Gaussian observations with a diagonal covariance matrix, but we conjecture that the result is also valid for the observation model considered here).
In [28], Paul admitted that a “crucial aspect of the work [29], [30] is the discovery of a phase transition phenomenon,” which is clearly analogous to the subspace swap phenomena known in the signal processing literature for 20 years [31]. Here, we have shown that the condition (16), or the simplified one for the spiked population matrix (24), which asymptotically prevents the phase transition phenomenon from occurring, is in fact the condition which guarantees the separability of the signal and noise subspaces in the asymptotic sample eigenvalue distribution. Note that the subspace splitting condition (16) may be satisfied, preventing “inter-subspace” swap, while for some signal subspace eigenvalues, the similar eigenvalue splitting condition (14) may not be met. In that latter case, those sample signal subspace eigenvalues collapse into a single cluster, and the expressions (20)–(21) must be modified. Yet, this “intra-subspace” swap is not important for subspace techniques, where only intersubspace swap matters.
Tufts et al. [1] stated that the threshold effect was associated with the probability that the measured data is better approximated by some components of the orthogonal subspace than by some components of the signal subspace. A narrow investigation of the relationship between these G-asymptotic phase transitions and subspace swap would therefore pinpoint the conditions under which the norm of the scalar product between the true and estimated eigenvectors in the signal subspace fall below 0.5, in which case Tufts description of the subspace swap becomes clearly equivalent. Condition (24), obtained under the spiked population covariance model, implies that in our 

 source scenario, when the eigenvalue
source scenario, when the eigenvalue 
 is below the threshold
is below the threshold 






 , the projection of the fourth eigenvector onto the sample signal subspace
, the projection of the fourth eigenvector onto the sample signal subspace 
(37)
Furthermore, the “signal processing” subspace swap definition implies
(38)
or, equivalently
(39)
i.e., the last signal eigenvector is better represented by the noise subspace than the signal subspace. Therefore, the behavior of the projection 





 is of prime importance for our analysis. In order to explore and validate these GSA analytic predictions with respect to MUSIC breakdown, let us analyze the
is of prime importance for our analysis. In order to explore and validate these GSA analytic predictions with respect to MUSIC breakdown, let us analyze the
scenario (7) considered in Section II for the following four SNR values:
•Input SNR  25 dB
25 dB  no MUSIC outliers;
no MUSIC outliers;
•Input SNR  14 dB
14 dB 
 50% MUSIC outliers;
50% MUSIC outliers;
•Input SNR  9 dB
9 dB  almost100% MUSIC outliers;
almost100% MUSIC outliers;
•Input SNR  0 dB
0 dB  onset of ML breakdown.
onset of ML breakdown.
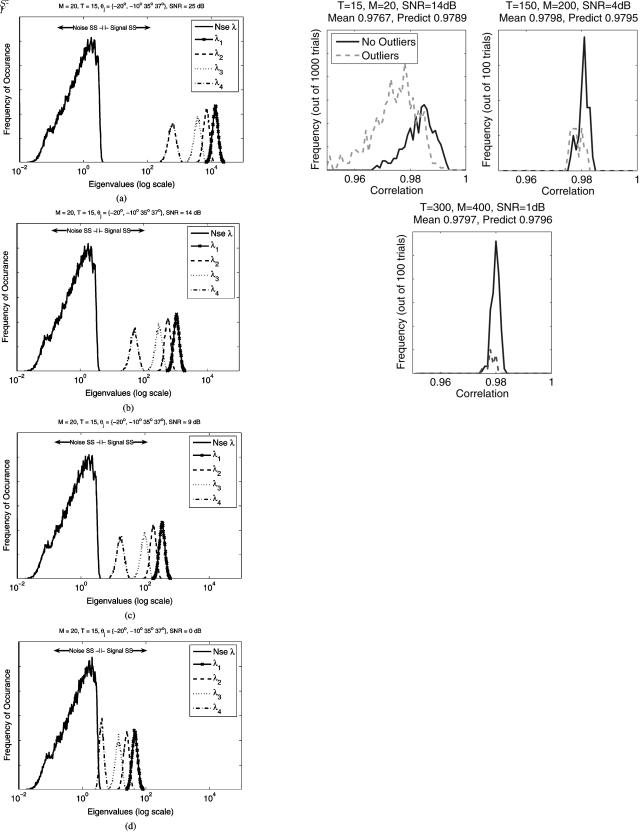
First, at Fig. 2 for each of these four SNR values we separately show the sample distributions of the four eigenvalues 





 in the signal subspace, along with the distribution of all nonzero eigenvalues in the noise subspace. As expected, the separation between the noise and signal subspace eigenvalues decrease as the source SNR decreases, but one can see that even for the SNR of 9 dB with practically 100% MUSIC breakdown, the cluster of nonzero noise subspace eigenvalues is still well separated from the minimal signal subspace eigenvalue
in the signal subspace, along with the distribution of all nonzero eigenvalues in the noise subspace. As expected, the separation between the noise and signal subspace eigenvalues decrease as the source SNR decreases, but one can see that even for the SNR of 9 dB with practically 100% MUSIC breakdown, the cluster of nonzero noise subspace eigenvalues is still well separated from the minimal signal subspace eigenvalue 
 . It is only at the lowest plotted SNR of 0 dB that we see significant overlap between the noise and signal subspace eigenvalues. The eigenvalues for the underlying true covariance matrices (denoted Eig
. It is only at the lowest plotted SNR of 0 dB that we see significant overlap between the noise and signal subspace eigenvalues. The eigenvalues for the underlying true covariance matrices (denoted Eig
 SNR
SNR are
are
Eig |
(40) |
Eig |
(41) |
Eig |
(42) |
Eig |
(43) |
which means that the subspace splitting condition 








 from (24)
from (24)
(44)
is satisfied for all four SNR values (although the 0 dB SNR case is marginal). The subspace splitting condition given in (16) can be computed for the transition from the signal subspace to the noise subspace which is the splitting condition between the 4th and 5th eigenvalues. This gives a value of 0.21, 0.24, 0.29, and 1.08 for 25, 14, 9, and 0 dB, respectively. This value is clearly less than 






 for all but the last SNR value. Based on these GSA metrics only, one would conclude that the noise and signal subspace eigenvalues are distinct for all but the last case at 0 dB SNR, and therefore subspace techniques should operate robustly at the higher SNRs. Yet significant MUSIC breakdown occurs in the 9- and 14-dB SNR case. It is also important to establish that the finite
for all but the last SNR value. Based on these GSA metrics only, one would conclude that the noise and signal subspace eigenvalues are distinct for all but the last case at 0 dB SNR, and therefore subspace techniques should operate robustly at the higher SNRs. Yet significant MUSIC breakdown occurs in the 9- and 14-dB SNR case. It is also important to establish that the finite 
 conditions examined here do not change dramatically asymptotically (in the GSA sense (1)), so in addition to the
conditions examined here do not change dramatically asymptotically (in the GSA sense (1)), so in addition to the 






 scenario considered above, let us examine the following three scenarios with an increased
scenario considered above, let us examine the following three scenarios with an increased  and
and  dimension, but with the ratio
dimension, but with the ratio 

 held constant.
held constant.
The original scenario:



 SNR
SNR  14 dB
14 dB
Eig |
(45) |
A 200-element array:





 SNR
SNR  4 dB
4 dB
Eig |
(46) |
3950 |
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 56, NO. 8, AUGUST 2008 |
Fig. 2. Eigenvalue Distributions for Scenario (7). Even in the presence of significant MUSIC breakdown for scenario SNR of 9 and 14 dB, the signal subspace eigenvalues remain well separated from the noise subspace eigenvalues.
(a) 25-dB SNR—No MUSIC Breakdown; (b) 14-dB SNR— 50% MUSIC outliers; (c) 9-dB SNR— 100 % MUSIC outliers; and (d) 0-dB SNR—Start of ML breakdown.
Fig. 3. Projection of 4th true eigenvector onto the sample signal subspace (scenario (45)–(47)). All scenarios show significant MUSIC breakdown ( 60 % 30 %, and 15 %, respectively), but the mean projection is converging to the predicted value in (56), whose high value indicates little subspace “leakage.”
A 400-element array with:


 20
20
 10
10 35
35 35.1
35.1
 SNR
SNR  1 dB
1 dB
Eig |
(47) |
Inter-source separations and SNR in the increased array size scenarios (46) and (47) have been chosen to produce essentially the same signal eigenvalues as per the original scenario (45) with 


 . All three eigenspectra have minimal signal subspace eigenvalues in the range of 64–66, which would allow us to expect the same G-asymptotic behavior under the spiked population covariance model. At Fig. 3, we introduce sample distributions of the projection
. All three eigenspectra have minimal signal subspace eigenvalues in the range of 64–66, which would allow us to expect the same G-asymptotic behavior under the spiked population covariance model. At Fig. 3, we introduce sample distributions of the projection 





 , calculated for all three scenarios (45), (46), (47) (with
, calculated for all three scenarios (45), (46), (47) (with 






 in all cases). First of all, we can clearly observe that in full agreement with GSA, the projection is converging as
in all cases). First of all, we can clearly observe that in full agreement with GSA, the projection is converging as 







 constant) to a non-statistical deterministic value. Indeed, one can observe quite a consistent convergence of the sample distributions for
constant) to a non-statistical deterministic value. Indeed, one can observe quite a consistent convergence of the sample distributions for 





 to a delta-function, whether the scenario contains a MUSIC outlier or not. Furthermore, while the results are converging asymptotically, the mean values observed at our modest array dimension of 20 elements are already quite accurate (to within 0.5% of the mean observed with 400 elements).
to a delta-function, whether the scenario contains a MUSIC outlier or not. Furthermore, while the results are converging asymptotically, the mean values observed at our modest array dimension of 20 elements are already quite accurate (to within 0.5% of the mean observed with 400 elements).
In order to predict these asymptotic deterministic values, let us consider the following Theorem 2 of Mestre [26].
JOHNSON et al.: MUSIC, G-MUSIC, AND ML PERFORMANCE BREAKDOWN
Theorem 2: If the splitting condition (16) for the smallest signal subspace eigenvalue 
 is satisfied, the random value
is satisfied, the random value
(48)
where  is a deterministic (unity norm) column vector, asymptotically
is a deterministic (unity norm) column vector, asymptotically 









 tends to the nonrandom value
tends to the nonrandom value 
 , i.e.,
, i.e.,
as |
(49) |
where
(50)
and 







 are the eigenvectors of the matrix
are the eigenvectors of the matrix  arranged in descending order and
arranged in descending order and
(51)
where 


 is the minimal (potentially negative) real-valued solution to
is the minimal (potentially negative) real-valued solution to
assuming that |
|
|
|
|
|
(52) |
. |
|
|
||||
|
|
|
|
|||
This theorem allows us to find the asymptotic MUSIC pseu-
dospectrum (9) if |
is an antenna steering vector. If |
|
instead |
(the |
th eigenvector of the actual covariance ma- |
trix |
), from (20), we get |
|
|
|
(53) |
where 


 is specified by (51). Therefore, we get (for
is specified by (51). Therefore, we get (for 

 )
)
(54)
For the “spiked population covariance matrix”, when 








 (27) (and
(27) (and 


 ), we finally get
), we finally get
(55)
and for our specific scenario with the minimal signal subspace eigenvalue associated with 

(56)
One can see that we get the same asymptotic expression as in (35), but now for the projection onto the entire sample subspace. This means that when the “intra-subspace swap” is precluded by
3951
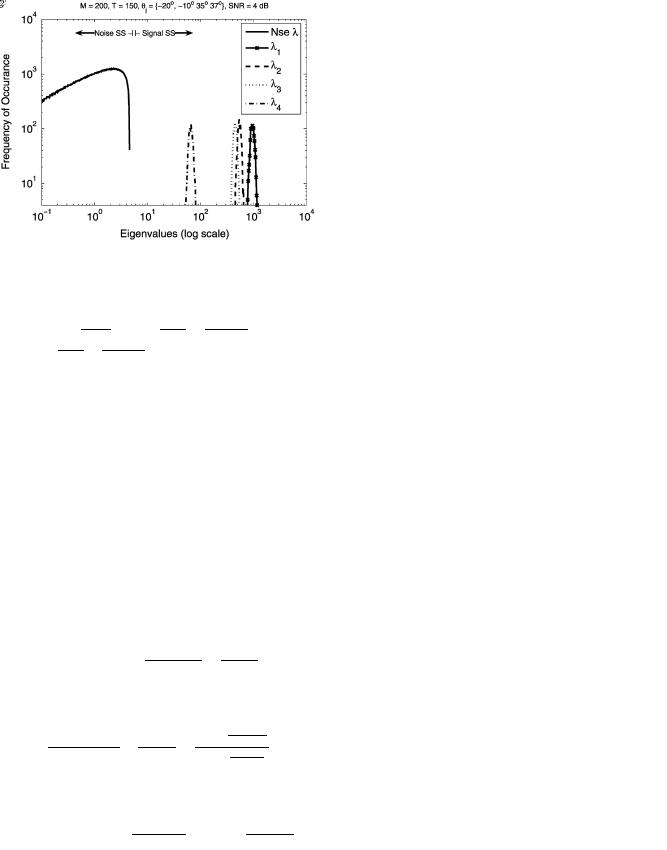
Fig. 4. Eigenvalue distributions for first 4 eigenvalues and noise eigenvalues for scenario (46), SNR 4 dB. Note significant overlap between second and third eigenvalue distribution.
having the eigenvalue splitting condition (14) satisfied for all signal subspace eigenvectors, the power (35) of the true eigenvector 
 asymptotically resides in the fourth sample subspace eigenvector
asymptotically resides in the fourth sample subspace eigenvector 
 , while the remaining power resides in the sample noise subspace. If instead only the subspace splitting condition (16) is satisfied , then the same power (56) is distributed across multiple sample signal subspace eigenvectors.
, while the remaining power resides in the sample noise subspace. If instead only the subspace splitting condition (16) is satisfied , then the same power (56) is distributed across multiple sample signal subspace eigenvectors.
As can be observed in Fig. 3, the discrepancy between the estimated mean values for 





 and the prediction (56) is within the fourth decimal point for a set of
and the prediction (56) is within the fourth decimal point for a set of 

 Monte Carlo trials and an array of
Monte Carlo trials and an array of 



 elements. While the match for (56) is quite good even for small arrays, we separately observe that the projections of the sample eigenvectors onto the individual true signal subspace eigenvectors,
elements. While the match for (56) is quite good even for small arrays, we separately observe that the projections of the sample eigenvectors onto the individual true signal subspace eigenvectors, 






 can deviate significantly from (35) for even large arrays, under some circumstances. The problem occurs when the eigenvalue splitting condition (14) is not met for all signal subspace eigenvalues and “intra-subspace” swap within the signal subspace precludes individual projections from presenting values close to those predicted by (35). This difference between observation and prediction persists for large arrays if as
can deviate significantly from (35) for even large arrays, under some circumstances. The problem occurs when the eigenvalue splitting condition (14) is not met for all signal subspace eigenvalues and “intra-subspace” swap within the signal subspace precludes individual projections from presenting values close to those predicted by (35). This difference between observation and prediction persists for large arrays if as 
 grow, source separation is decreased, as we have done in (45)–(47). For the scenario (46) with
grow, source separation is decreased, as we have done in (45)–(47). For the scenario (46) with 



 elements,
elements, 



 samples, and a very small difference between the second
samples, and a very small difference between the second 






 and third
and third 






 eigenvalue (see Fig. 4), intra-subspace swap for eigenvectors 2 and 3 was frequently observed with
eigenvalue (see Fig. 4), intra-subspace swap for eigenvectors 2 and 3 was frequently observed with 



















 and the sample distribution of
and the sample distribution of 






 distributed widely over the [0 1] interval, as seen in Fig. 5. While this intra-subspace swap phenomena will not persist G-asymptotically
distributed widely over the [0 1] interval, as seen in Fig. 5. While this intra-subspace swap phenomena will not persist G-asymptotically 









 as the relative dimension of the signal subspace vanishes, it still indicates that for breakdown analysis on finite arrays, the projection onto the entire subspace rather than individual eigenvectors is the appropriate metric.
as the relative dimension of the signal subspace vanishes, it still indicates that for breakdown analysis on finite arrays, the projection onto the entire subspace rather than individual eigenvectors is the appropriate metric.
Finally, the most important observation from the MUSIC breakdown standpoint is that for both “proper” trials with no outliers and “improper” MUSIC trials with at least one outlier, the minimal signal subspace eigenvector still resides in the sample signal subspace with more than 95% of its power, converging asymptotically to 98%. This convergence is accurately
3952 |
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 56, NO. 8, AUGUST 2008 |
Fig. 5. Inner product of sample and true eigenvectors for element array and scenario (46). Correlation of the second and third sample eigenvectors with their associated true eigenvectors 
 is poor because of frequent eigenvector swap, as is the match between the observed mean and the prediction from (35). Such “intra-subspace” swap should not affect MUSIC or any other subspace-based technique.
is poor because of frequent eigenvector swap, as is the match between the observed mean and the prediction from (35). Such “intra-subspace” swap should not affect MUSIC or any other subspace-based technique.
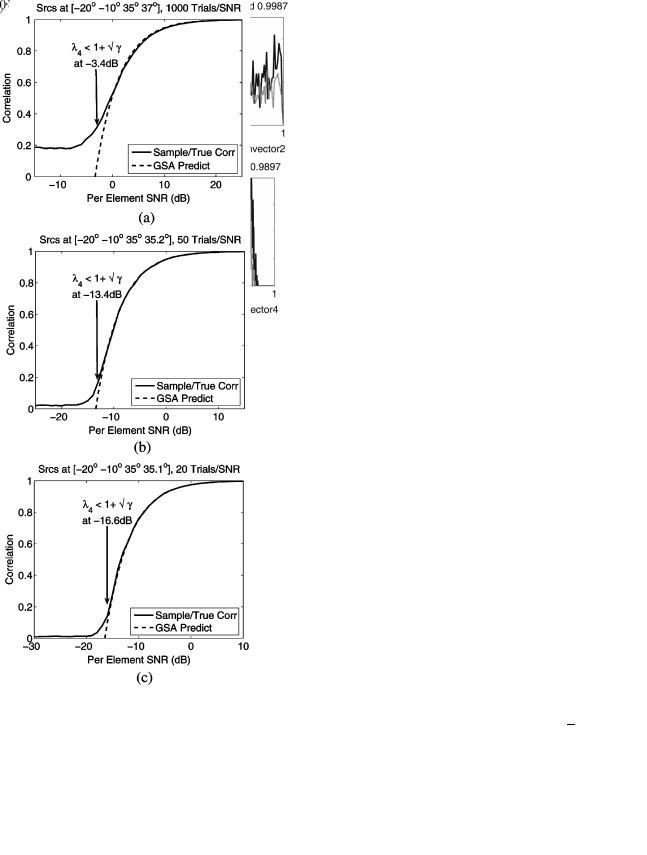
predicted by (56) for multiple SNR values, as indicated in Fig. 6.
The main conclusion that is now supported both by GSA theory and direct Monte Carlo simulations is that for the considered scenario, subspace swap is not responsible for the MUSIC breakdown phenomenon observed, and the underlying mechanism requires further exploration.
IV. SOURCE RESOLUTION AND MUSIC
“PERFORMANCE BREAKDOWN”
Careful examination of the pseudospectrum produced during trials with MUSIC outliers, such as in our scenario (7) with SNR 

 dB, show that in many trials, the MUSIC algorithm selected an erroneous peak at
dB, show that in many trials, the MUSIC algorithm selected an erroneous peak at 

 despite the fact that the pseudo-spectrum value at that peak was significantly smaller than the pseudo-spectrum values at any true source direction
despite the fact that the pseudo-spectrum value at that peak was significantly smaller than the pseudo-spectrum values at any true source direction
(57)
This happened only because MUSIC was unable to resolve the third and the fourth closely located sources 


 35
35


 37
37
 and instead found a single maxima in their vicinity. This well-known phenomena of loss of MUSIC resolution capability
and instead found a single maxima in their vicinity. This well-known phenomena of loss of MUSIC resolution capability
[4] is not directly associated with the “subspace swap” phenomenon and in fact is associated with a significantly smaller portion of sample signal subspace energy residing in the noise subspace than is required for subspace swap as defined in (38). This fact has been already demonstrated by the experimental data in Figs. 3 –6 as well as the GSA prediction (56).
To examine the effect of this loss of resolution further, we need to define a “resolution event.” In [32], Cox defines a res-
Fig. 6. Comparison of predicted and observed projection of the fourth sample eigenvector onto the true signal subspace. The correspondence between the observations and the predictions above  is accurate even at small array sizes such as the array. (a) ; (b)
is accurate even at small array sizes such as the array. (a) ; (b)
; and (c) .
olution event for closely spaced sources, such as the DOAs 
 and
and 
 in scenario (7), as the event when
in scenario (7), as the event when
(58)
where 










 . This condition means that the sample MUSIC pseudo-spectrum in the midpoint
. This condition means that the sample MUSIC pseudo-spectrum in the midpoint 
 between the true DOAs (
between the true DOAs (
 and
and 
 ) lies below the line that connects the pseudospectrum values at the true DOAs.
) lies below the line that connects the pseudospectrum values at the true DOAs.