

Балабина_МУ_динамическое_исслед_механизма
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
энергию механизма определить |
|
как |
сумму кинетических |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i п |
|
|
|
энергий отдельных звеньев механизма T Ti . |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
Кинетическая энергия любого звена согласно теореме Кёнига |
|||||||||||||
определяется формулой |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
T |
m |
i |
v 2 |
I |
Si |
2 |
|
||||
|
|
|
|
|
|
|
|
Si |
|
i |
, |
где |
|||||
|
|
|
|
|
|
i |
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
m |
v 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
Si |
|
- кинетическая энергия |
i - звена при его поступательном |
||||||||||
2 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
движении со скоростью vSi |
центра масс звена; |
||||||||||
|
I 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Si |
|
i |
|
- кинетическая энергия i - го звена при его вращательном |
|||||||||||
2 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
движении вокруг оси, проходящей через центр масс Si . Скорости (как линейные, так и угловые), входящие в выражение
для Ti , определяем по рычагу Жуковского, используя его как план скоростей.
Для механизма станка, изображённого на рис. 1, пренебрегая весами звеньев 1 и 2, т.е. принимая Т1 = Т2 = 0, имеем
Т = Т3 + Т4 + Т5,
где Т3, Т4,, Т5 - кинетические энергии соответственно кулисы 3, шатуна 4 и ползуна 5.
T |
m v2 |
|
I |
|
|
2 |
|
|
|
m ( ps )2 |
2 |
|
I |
S 3 |
( pb )2 |
|
2 |
|
|||||||||||||||||||
|
3 S 3 |
|
|
|
S 3 3 |
3 |
3 |
|
v |
|
|
|
3 |
|
|
|
|
v |
|||||||||||||||||||
3 |
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2(CB) |
2 |
|
|
2 |
|
[Дж], |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
m v2 |
I |
|
|
|
2 |
|
|
m ( ps |
)2 |
|
2 |
|
|
I |
S 4 |
(de)2 |
2 |
|
|
|
|
|||||||||||||||
|
4 S 4 |
|
|
S 4 4 |
|
|
4 |
4 |
|
v |
|
|
|
|
|
|
v |
|
|
|
[Дж], |
||||||||||||||||
4 |
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 4 |
|
|
|
|
|
|
|
|
||||||
T5 |
|
m v2 S 5 |
|
|
m ( pe)2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
5 |
|
|
|
|
5 |
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2 |
|
|
|
|
|
2 |
|
|
|
[Дж]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Результаты расчётов занести в пояснительной записке в таблицу следующего вида:
12
Таблица 2.
Положение |
ps3 |
pb3 |
CB |
ps4 |
de |
рe |
T3 |
T4 |
T5 |
T |
|
механизма |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На листе построить графики Тi =Тi ( ) для периода установившегося движения механизма.
Для построения графиков Тi =Тi ( ) для станков, прессов и компрессоров по оси отложить произвольный отрезок х1об, изображающий полный оборот кривошипа, и разделить его на 12
равных частей. Отрезок х1об |
желательно выбрать 240…360мм. |
|||||
Масштаб по оси будет равен |
|
= |
2 |
|
рад |
. |
|
|
|||||
|
|
|
||||
|
|
х1об |
|
|
||
|
|
|
|
мм |
||
На перпендикулярах, восстановленных в точках деления, отложить в произвольно выбранном масштабе μТ рассчитанные значения кинетической энергии каждого звена Тi и провести плавные кривые Тi =Тi ( ). В том же масштабе построить суммарный график Т =Т ( ). Графики Тi =Тi ( ) удобно расположить в нижнем правом
|
Дж |
|
|
углу листа. При выборе масштабного коэффициента μТ |
|
|
следует |
|
|||
|
мм |
|
|
помнить, что над графиками Тi =Тi ( ) будут расположены ещё три
графика Мпр =Мпр ( ), А = А ( ) и = ( ).
Для одного из механизмов станка графики Ti =Тi ( ) показаны на рис.3
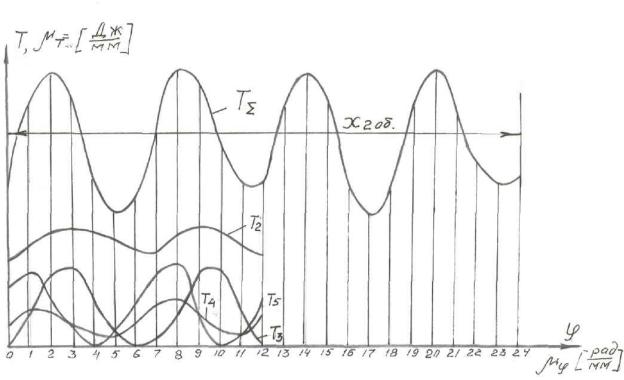
При построении графиков Тi =Тi ( ) для механизмов двигателя по оси отложить произвольный отрезок х2об , изображающий два оборота кривошипа, и разделить его на 24 равные части. На отрезке, соответствующем одному обороту кривошипа, построить графики Тi=Тi ( ) и Т =T ( ), а на второй половине отрезка х2об построить только суммарный график Т =T ( ). Для одного из механизмов двигателя графики Тi =Тi ( ) показаны на рис.4. Масштаб по оси
|
|
|
|
|
|
|
|
13 |
равен |
|
4 |
|
рад |
. Отрезок |
х2об |
удобно взять равным |
|
|
|
|
|
|||||
|
|
|||||||
|
|
x2об |
мм |
|
|
|
||
240мм…360мм.
рис.3
14
рис. 4
5. Рассчитать приведённый момент инерции для 12-ти положений механизма.
Приведённым моментом инерции звеньев механизма Iпр.зв называется такой условный момент, которым должно обладать звено приведения, чтобы его кинетическая энергия была равна кинетической энергии всего механизма.
Из определения следует, что
I 2
пр.зв |
T , |
|
|
||
2 |
||
|
откуда |
I |
|
|
2T |
, |
пр.зв |
|
||||
|
|
2 |
|||
|
|
|
|
|
|
где - угловая скорость звена приведения. Величина приведенного момента инерции не зависит от скорости звена приведения, а зависит только от положений механизма.
Полный приведенный момент инерции складывается из двух составляющих: Iпр.const - приведенного момента инерции от звеньев,
15
связанных со звеном приведения постоянным передаточным отношением и Iпр.зв - приведенного момента инерции от звеньев рычажного механизма, который является переменной величиной и его требуется определить для всех основных положений механизма. Так как кинетическая энергия Т определяется из условия, что угловая скорость кривошипа во всех положениях механизма равна средней угловой скорости ωср , то для получения значений приведенного момента инерции Iпр.зв его величину следует рассчитать по формуле:
I |
|
|
2T |
[кг м2 ]. |
|
пр.зв. |
|
||||
|
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
ср |
|
Полный приведённый к кривошипу момент инерции будет складываться:
Iпр = Iпр.зв + Iпр.const .
Значение Iпр для различных положений механизма также занести в таблицу 3.
|
|
Таблица 3 |
Положение механизма |
Iпр.зв |
Iпр.= Iпр.зв + Iпр.const |
|
|
|
0 |
|
|
1 |
|
|
2 |
|
|
… |
|
|
6. С помощью рычагов Жуковского определить приведённый момент сил сопротивления Мпр.с или приведённый момент движущих сил Mпр.дв и построить график Mпр.с = Мпр.с ( ) или Mпр.дв = Mпр.дв( ) для периода установившегося движения.
Приведённым моментом сил Мпр называется такой условный момент, действующий на звено приведения, мощность которого в каждом положении должна быть равна мощности всех сил, действующих на звенья механизма.
Величина приведенного момента сил Мпр определяется по формуле

16
|
|
FiVE |
|
|
|
|
|
M |
|
|
пр |
i |
cos(Fi ;V |
E i |
) |
|
|
||
M |
|
|
|
i i |
, где |
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Fi – сила, действующая на i-тое звено; VEi – скорость точки приложения Fi ;
Mi – момент, действующий на i-тое звено;
ωi – угол поворота звена, на котором действует Mi ; ω – угловая скорость звена приведения.
Приведенный момент сил может быть также найден по рычагу Жуковского. Согласно теореме о рычаге, мощность любой силы определяется как произведение момента этой силы относительно полюса рычага на его масштабный коэффициент.
M |
|
|
v F h |
( AB) |
F h |
|
пр |
|
|||||
|
|
|
i i |
( pb) |
i i [мм]. |
|
|
|
|
|
|
||
Если рычаг Жуковского построен поворотом плана скоростей на 90° против вращения кривошипа, то момент будет положительным, если он направлен в сторону вращения кривошипа, и отрицательным
– если против. Плечи сил hi замеряем на рычаге в [мм].
При выполнении листа приведенный момент всех сил Мпр определяется как сумма приведённого момента сил сопротивления Мпр.с и сил движущих Мпр.дв.
Мпр= Мпр.дв+ Мпр.с
А. Для механизмов станков с помощью рычага Жуковского определяем приведённый момент Мпр.с от заданной силы сопротивления и сил тяжести звеньев. При этом силу F следует учитывать только в тех положениях рабочего хода, где она действует согласно диаграмме сил. Силы тяжести звеньев учитываются во всех положениях механизма.
Для дополнительных положений, соответствующих началу и концу резания (см. рис. 1,а точки 14, 15) значения Мпр.с рассчитываются дважды. Первый раз с учётом силы F и сил тяжести звеньев, второй раз только от сил тяжести звеньев.
График Мпр.с=Мпр.с( ) построить на участке х1об над графиком Ti=Тi ( ). В точках деления восстановить перпендикуляры и на них
отложить значения Мпр.с в произвольно выбранном масштабе М[ ммнм ].
При построении графика учитывать знак полученных по рычагу Жуковского значений Мпр.с .
17
Для рассматриваемого механизма станка, приведённый момент сил сопротивления по рычагу Жуковского для положения 2 определится (см. рис.1,а) следующим образом:
М пр.с |
|
|
( АВ) |
[ F ( pe) G3h1 |
G4h2 |
G5 ( pe)] |
[мм]. |
|
( рb1,2 ) |
||||||||
|
|
|
|
|
|
|||
В пояснительной записке удобно составить таблицу следующего вида:
|
|
|
|
|
|
|
|
Таблица 3. |
||
|
|
|
|
|
|
|
|
|
|
|
Положение |
F |
pe |
F∙(pe) |
h1 |
G3h1 |
h2 |
G4h2 |
G5∙(pe) |
Мпр.с |
|
механизма |
||||||||||
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
График Мпр.с( ) для одного из механизмов станка показана на рис.5
18
Б. Для механизмов прессов при определении приведённого момента сил сопротивления Мпр.с силами тяжести звеньев пренебречь.
Мпр.с следует определить только для тех положений рабочего хода, где согласно диаграмме действует сила F. Дополнительным положением для прессов (кроме второго крайнего положения) является положение механизма, соответствующее началу действия силы. Во всех остальных положениях механизма за цикл установившегося движения считать Мпр.с= 0. График Мпр.с( ) для одного из механизмов пресса показан на рис.6
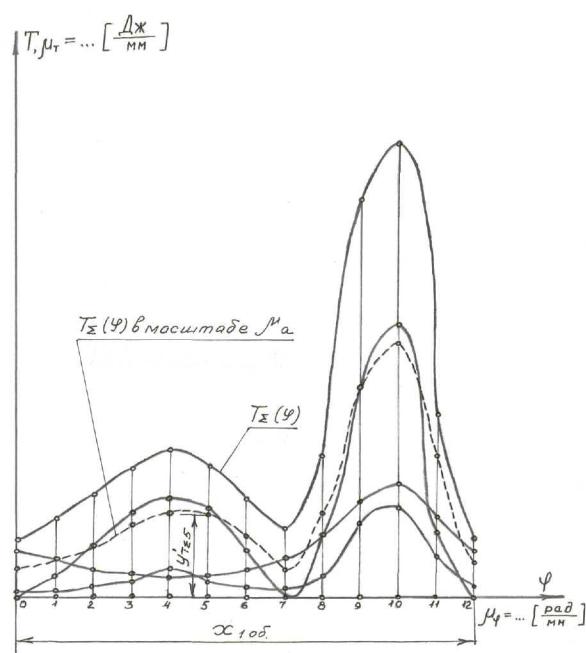
В. Для механизмов компрессоров приведенный момент сил сопротивления Мпр.с рассчитать только от силы F. Весами звеньев пренебречь. Силу F необходимо предварительно определить используя диаграмму P=P(S). Пример графика Мпр.с изображен на рисунке 7.
19
Г. Для механизмов двигателей с помощью рычага Жуковского определяем приведённый момент движущихся сил Мпр.дв от сил F' и F″ для всех положений механизма за два оборота кривошипа.
Силами тяжести звеньев пренебрегаем. Каждый рычаг Жуковского используется дважды. На рис.2,б изображён рычаг для 1-го и 13-го положений механизма. Приложенные к рычагу силы F1′ и F1″ соответствуют 1-му положению механизма, а F13′ и F13″ 13-му положению механизма.
График Мпр.дв=Мпр.дв( ) построить на отрезке х2об для двух оборотов кривошипа над графиком Ti =Тi ( ).
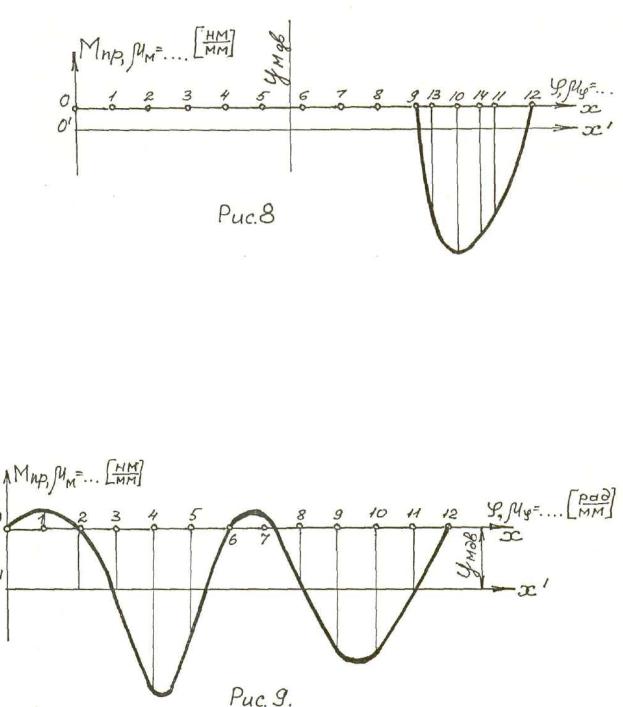
На рис.8 изображён график Мпр.дв( ) для одного из механизмов двигателя.
рис.10
20
7. Перейти от графика Мпр.с=Мпр.с( ) или. Мпр.дв=Мпр.дв( ) к суммарному графику Мпр=Мпр( ).
А. Для механизмов станков, прессов, компрессоров приведенный момент движущих сил Мпр.дв( ) принимаем для упрощения задачи постоянным Мпр.дв = const. Величину Мпр.дв( ) определяем из условия, что за период установившегося движения (один оборот кривошипа) сумма работ сил движущих равна сумме работ сил сопротивления
( Адв) = | Ас| . Таким образом при Мпр.дв = const
2
М пр.дв 2 М пр.с d , т.е.
0
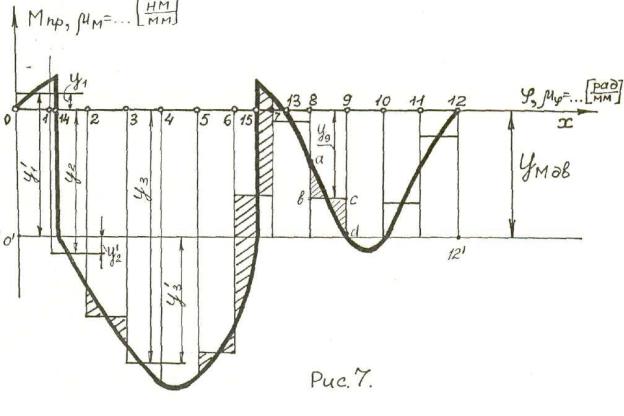
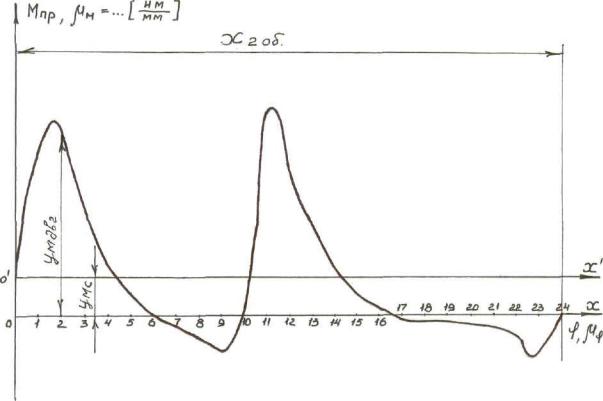
за период 2 площадь ограниченная кривой Мпр.с =Мпр.с ( ) должна быть равна площади прямоугольника (см. рис.5), высота которого соответствует ординате yMдв графика Мпр.дв =Мпр.дв ( ).
Площадь, ограниченную кривой Мпр.с =Мпр.с ( ) определяем как сумму площадей, подсчитанных на каждом участке (см. рис.5). Для этого на каждом участке 0-1, 1-2, 2-3 и т.д. заменяем кривую горизонтальной прямой: эта прямая проводится на глаз, но с таким расчетом, чтобы заштрихованные площади, лежащие выше и ниже проведенной прямой были одинаковы. Высоты полученных прямоугольников обозначаем y1, y2, y3 и т.д. Таким образом на каждом участке площадь, ограниченная исходной кривой, осью абсцисс и двумя соседними ординатами, заменяются площадью
прямоугольника, определяемой как |
yi |
x1об |
. Следовательно, |
||||||||||||||||||
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
||
|
|
у |
|
х |
|
у |
х1об |
у |
|
х1об |
у |
|
х1об |
... у |
|
х1об |
. |
||||
|
|
|
|
|
|
|
3 12 |
12 12 |
|||||||||||||
|
|
|
Мдв |
1об |
|
1 |
12 |
|
|
2 |
12 |
|
|
|
|
||||||
Откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
у |
Мдв |
у1 у |
2 у3 |
... у12 |
|
[мм], |
|
|
|
|
|
|
|
||||||||
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где у1, у2, у3, … считать положительными, если они измерены выше оси ох и отрицательными, если ниже оси ох.
Полученную ординату уМдв отложить от оси ох соответственно знаку и провести через нее горизонтальную линию о′х′.
Приняв эту линию о′х′ за новую ось абсцисс, получим, что кривая Мпр.с относительно новой оси о′х′ будет изображать суммарный график приведенного момента Мпр =Мпр ( ).