

2. Трение качения
С
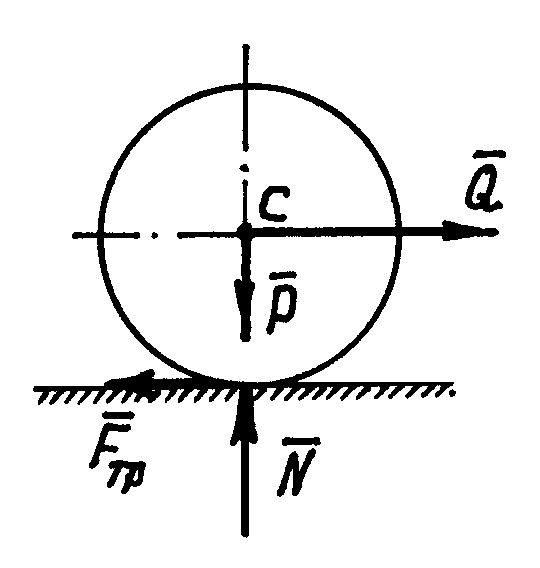
Рис. 7.7.![]() не может препятствовать движению,
качению колеса (момент сил относительно
точки касания не равен нулю даже при
совсем малой силе
не может препятствовать движению,
качению колеса (момент сил относительно
точки касания не равен нулю даже при
совсем малой силе![]() ).
Сила трения, образуя с силой
).
Сила трения, образуя с силой![]() пару, будет вращать тело, заставит его
катиться по поверхности.
пару, будет вращать тело, заставит его
катиться по поверхности.
С
Рис. 7.8.
Рис. 7.7.
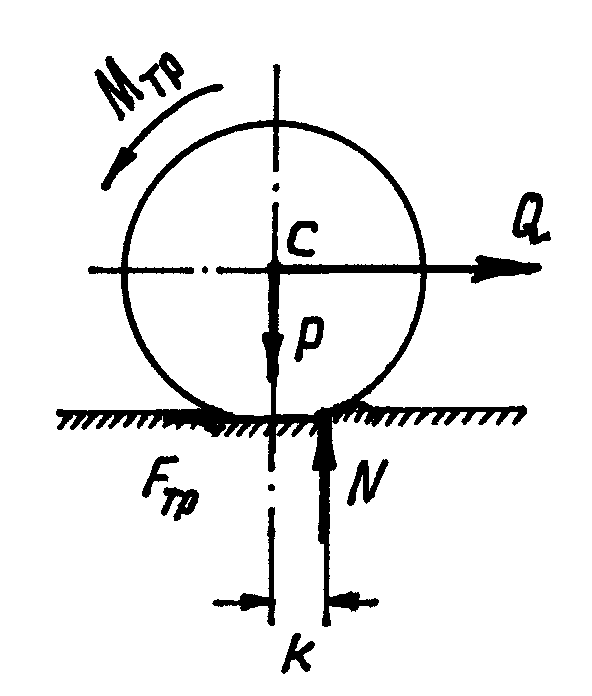
![]() окажется приложенной не под центром
колеса, а смещённой вперёд на расстояниеk(рис. 7.8). Силы
окажется приложенной не под центром
колеса, а смещённой вперёд на расстояниеk(рис. 7.8). Силы![]() и
и![]() будут теперь образовывать пару, которая
и препятствует качению тела. Момент
этой пары
будут теперь образовывать пару, которая
и препятствует качению тела. Момент
этой пары![]() называетсямоментом трения качения.
Он оказывается пропорциональным
нормальной реакции. Коэффициент
пропорциональностиk– называется коэффициентом трения
качения. Размерность его – размерность
длины (см). Считается, что он зависит
только от радиуса колеса и материалов
колеса и поверхности.
называетсямоментом трения качения.
Он оказывается пропорциональным
нормальной реакции. Коэффициент
пропорциональностиk– называется коэффициентом трения
качения. Размерность его – размерность
длины (см). Считается, что он зависит
только от радиуса колеса и материалов
колеса и поверхности.
Следует ещё раз, специально заметить, что сопротивление качению характеризуется не силой, а парой – моментом этой пары (моментом трения качения) (рис. 7.8).
Если
колесо катится без скольжения, то сила
трения
![]() .
А так как при равновесии (рис. 7.8)
.
А так как при равновесии (рис. 7.8)![]() ;
;![]() ,
то
,
то![]() .
.
Поэтому
условием качения без скольжения является
неравенство
![]() или
или![]() ,
гдеr
– радиус колеса.
,
гдеr
– радиус колеса.
Кинематика точки
1.Способы задания движения точки
Прежде чем заняться исследованием движения точки, определением характеристик этого движения, надо научиться определять положение точки в пространстве в нужный момент времени.
Для этого существует несколько способов задания движения.
1) Естественный способ.
Ч
Рис. 8.1.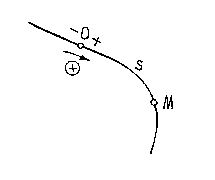 тобы
определить движение точки естественным
способом должно быть заранее задано
(рис. 8.1): траектория движения точки (
линия, по которой точка движется);
начало отсчёта (точка
тобы
определить движение точки естественным
способом должно быть заранее задано
(рис. 8.1): траектория движения точки (
линия, по которой точка движется);
начало отсчёта (точка![]() ,
от которой по траектории отсчитывается
расстояниеsдо
движущейся точкиМ ) ; направление,
в котором откладываются положительные
значения характеристик движения
(указывается стрелкой, либо знаками
+ и − ); закон движенияs
= s(t).
,
от которой по траектории отсчитывается
расстояниеsдо
движущейся точкиМ ) ; направление,
в котором откладываются положительные
значения характеристик движения
(указывается стрелкой, либо знаками
+ и − ); закон движенияs
= s(t).
Пример 8.1.Точка движется по прямой
линии, по закону![]() (рис. 8.2).
(рис. 8.2).
В начале движения, при
![]() Положение точки
Положение точки![]() называетсяначальным положением. При
называетсяначальным положением. При
![]()
К
Рис. 8.2.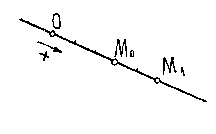 онечно,
за
онечно,
за![]() точка прошла расстояниеM0M1=2
см. Так чтоs– это не путь пройден- ный точкой, а
расстояние от начала отсчёта до точки.
точка прошла расстояниеM0M1=2
см. Так чтоs– это не путь пройден- ный точкой, а
расстояние от начала отсчёта до точки.
2) Координатный способ.
Этим способом положение точки в какой
либо системе координат определяется
её координатами
![]() (рис. 8.3). При движении точки эти координаты
изменяются. Поэтому, чтобы определить
положение точки в нужный момент времени,
должны быть заданы координаты как
функции
(рис. 8.3). При движении точки эти координаты
изменяются. Поэтому, чтобы определить
положение точки в нужный момент времени,
должны быть заданы координаты как
функции
времени
![]() :
:![]() (8.1)
(8.1)
Эти функции называются уравнениями движения точки.
Уравнения движения позволяют определить не только положение точки в любой момент времени, но и все характеристики движения, в том числе и траекторию движения.
Ч
Рис. 8.3.
![]() .
.
Пример1.2.Движение точки задано уравнениями
Ч
Рис.
8.4.
![]() из второго
из второго![]() Затем возведём в квадрат и сложим.
Так как
Затем возведём в квадрат и сложим.
Так как![]() получим
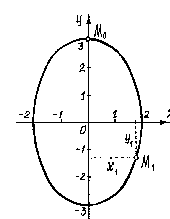
получим![]() Это урав- нение эллипса с полуосями
Это урав- нение эллипса с полуосями![]() и
и![]() (рис. 8.4).
(рис. 8.4).
Начальное положение точки
![]() (при
(при![]() )
определяется координатами
)
определяется координатами![]()
![]() Через
Через![]() точка будет в положении
точка будет в положении![]() с координатами
с координатами
![]()
Примечание.
Движение точки может быть задано с помощью и других координат. Например, цилиндрических или сферических. Среди них будут не только линейные размеры, но и углы. При необходимости, с заданием движения цилиндрическими и сферическими координатами можно познакомиться по учебникам.
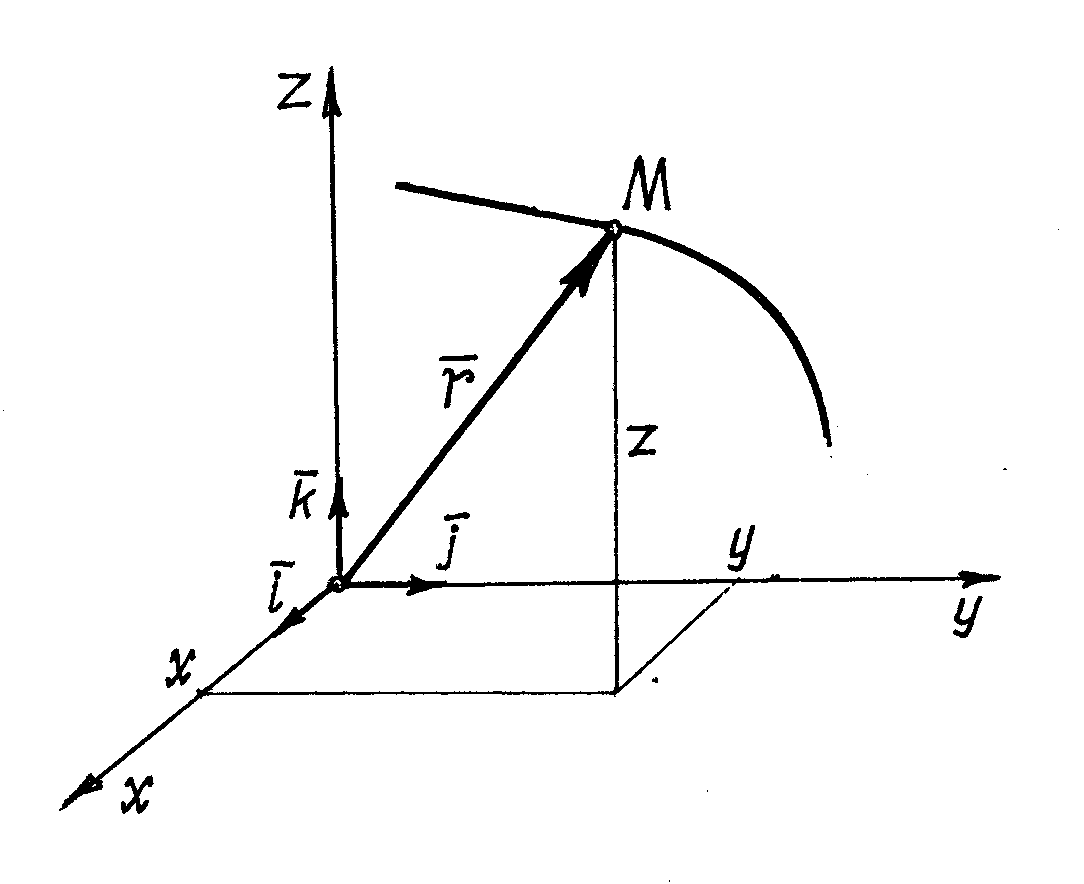
3) Векторный способ.
Положение точки можно определить
заданием вектора
![]() ,
проведённого из неподвижной точки
,
проведённого из неподвижной точки![]() ,
предполагая, что точка
,
предполагая, что точка![]() находится на конце этого вектора
(рис. 8.3). Этот вектор называетсярадиусом-вектором точки
находится на конце этого вектора
(рис. 8.3). Этот вектор называетсярадиусом-вектором точки
![]() .
Конечно, чтобы определить положение
точки в любой момент времени, радиус-вектор
должен быть задан как функция времени
.
Конечно, чтобы определить положение
точки в любой момент времени, радиус-вектор
должен быть задан как функция времени![]()
Нетрудно установить зависимость между векторным и координатным способами задания движения.
Разложим вектор
![]() на составляющие по осям координат:
на составляющие по осям координат:
![]() где
где![]() -
проекции вектора на оси;
-
проекции вектора на оси;![]() –
единичные векторы направленные по осям,
орты осей. Так как начало
–
единичные векторы направленные по осям,
орты осей. Так как начало![]() вектора находится в начале координат,
то проекции вектора будут равны
координатам точки
вектора находится в начале координат,
то проекции вектора будут равны
координатам точки![]() .Поэтому
.Поэтому
![]() (8.2)
(8.2)
Траектория движения точки
![]() – это линия, которую описывает конец
изменяющегося радиуса-вектора. Эта
линия называетсягодографом вектора
– это линия, которую описывает конец
изменяющегося радиуса-вектора. Эта
линия называетсягодографом вектора![]() .
.