

3. Закон равенства действия и противодействия.
Силы взаимодействия двух материальных точек равны по модулю и противоположно направлены по прямой, проходящей через эти точки.
|
|
|

4. Закон независимости действия сил.
При одновременном действии на материальную точку нескольких сил, ускорение точки в инерциальной системе отсчета от каждой отдельной силы не зависит от остальных сил, а полное ускорение точка равно векторной сумме ускорений, получаемых точкой от действия каждой отдельной силы.
![]() ,
,![]() ,
…,
,
…,![]() ;
(2)
;
(2)
![]() .
(3)
.
(3)
Следствие.
Сложим левые и праве части выражений (2) и учтем (3), получим:
![]() .
(4)
.
(4)
Выражение (4) – основное уравнение динамики точки при действии на нее нескольких сил.
1. Динамика материальной точки
1.1. Дифференциальные уравнения движения материальной точки
Рассмотрим движение некоторой материальной точки Мв инерциальной системе отсчета.
![]() .
(5)
.
(5)
|
|
Введем радиус-вектор точки Мотносительно начала системы координат. Как известно из кинематики
Тогда уравнение (5) перепишется в виде
|

Полученное уравнение (6) – дифференциальное уравнение движения точки в векторной форме. Его же можно переписать следующим образом:
![]() .
(6')
.
(6')
Спроецируем уравнение (5) на оси координат:
![]() ,
,![]() ,
,![]() .
.
Из кинематики известно, что
![]() ,
,![]() ,
,![]() ,
,
тогда
![]() ,
,![]() ,
,![]() ,
(7)
,
(7)
![]() ,
,![]() ,
,![]() .
(7')
.
(7')
Уравнения (7) и (7') – дифференциальные уравнения движения точки в координатной форме (в декартовой системе координат).
Рассмотрим движение точки по заданной траектории. Положение точки на траектории определяется дуговой координатой. В точке вводятся естественные оси.
|
|
Проецируем уравнение движения (5) на естественные оси:
Согласно кинематике:
всегда лежит в сопряженной плоскости).
|

Тогда, получаем
![]() ,
,![]() ,
,![]() .
(8)
.
(8)
Выражения (8) – дифференциальные уравнения движения точки в естественных осях (естественные дифференциальные уравнения).
Центр тяжести
1. Сложение параллельных сил. Центр параллельных сил
Пусть
даны две параллельные силы
![]() и
и![]() ,
направленные в одну сторону и приложенные
к точкам
,
направленные в одну сторону и приложенные
к точкам![]() и
и![]() (рис. 6.1).
(рис. 6.1).
Конечно,
величина их равнодействующей
![]() .
Вектор её параллелен силам и направлен
в ту же сторону. С помощью теоремы
Вариньона (5.8) найдём точку приложения
равнодействующей – точкуС.
По этой теореме
.
Вектор её параллелен силам и направлен
в ту же сторону. С помощью теоремы
Вариньона (5.8) найдём точку приложения
равнодействующей – точкуС.
По этой теореме
![]() .
Значит
.
Значит
Рис. 6.1.![]()
![]()
О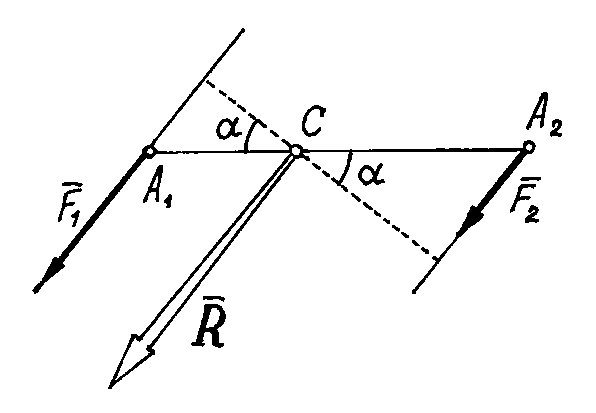 тсюда
тсюда![]() То есть точка приложения равнодействующей
делит расстояние между точками
То есть точка приложения равнодействующей
делит расстояние между точками![]() и
и![]() на части обратно пропорциональные
силам.
на части обратно пропорциональные
силам.
Если
параллельные силы направлены в
противоположные стороны (рис. 6.2), то
аналогично можно доказать, что
равнодействующая по величине будет
равна разности сил:
![]() (если
(если![]() ),
параллельна им, направлена в сторону
большей силы и расположена за большей
силой – в точкеС.
А расстояния от точки С
до точек приложения сил обратно
пропорциональны силам:
),
параллельна им, направлена в сторону
большей силы и расположена за большей
силой – в точкеС.
А расстояния от точки С
до точек приложения сил обратно
пропорциональны силам:
![]()
С
Рис. 6.2.

![]() и
и![]() ,
точками приложения сил, то, при повороте
этих сил в одну сторону на одинаковый
угол, равнодействующая также повернётся
вокруг точки приложенияС
в том же направлении, и останется
параллельной им.
,
точками приложения сил, то, при повороте
этих сил в одну сторону на одинаковый
угол, равнодействующая также повернётся
вокруг точки приложенияС
в том же направлении, и останется
параллельной им.
Такая точка приложения равнодействующей называется центром параллельных сил.
К
Рис. 6.2.
Следовательно, положение центра параллельных сил зависит от координат точек приложения сил.
Центром нескольких параллельных сил, найденный последовательным сложением каждых двух сил, будем называть точку С, радиус-вектор которой определяется формулой
![]() , (6.1)
, (6.1)
где
![]() - радиусы-векторы точек приложения сил;
- радиусы-векторы точек приложения сил;![]() –
величина равнодействующей параллельных
сил, равная алгебраической сумме этих
сил (знак силы определяется направлением,
которое заранее выбирается и считается
положительным).
–
величина равнодействующей параллельных
сил, равная алгебраической сумме этих
сил (знак силы определяется направлением,
которое заранее выбирается и считается
положительным).
Используя (6.1), нетрудно найти координаты центра параллельных сил. Если радиусы-векторы откладывать из начала координат, то проекции радиусов-векторов точек на оси будут равны их координатам. Поэтому, проектируя векторное равенство (6.1) на оси, получим
![]() (6.2)
(6.2)
г де
де![]() – координаты точек приложения сил.
– координаты точек приложения сил.