

торой возникает искрение. Это снижает надежность машин и ограничивает область их применения.
Существенным недостатком ДПТ является необходимость предварительного преобразования для них электрической энергии переменного тока в электрическую энергию постоянного тока.
13.2. Устройство и принцип действия двигателей постоянного тока
Двигатели постоянного тока состоят из трех основных частей:
–неподвижная часть – станина с индуктором;
–вращающаяся часть – якорь;
–коллектор, закрепленный на валу якоря и вращающийся вместе с ним.
Индуктор – система неподвижных электромагнитов (полюсов), установленных по окружности на станине машины, которые состоят из сердечников, полюсных наконечников, необходимых для создания требуемого распределения магнитного потока и обмоток,
называемых обмотками возбуждения.
Сердечники и полюсные наконечники выполнены из листовой электротехнической стали.
Станина – литая или сварная – выполнена из чугуна или стали, на ней устанавливаются полюса и подшипниковые щиты, в которых закрепляются подшипники вала якоря. Станина также является ярмом машины, обеспечивающим замкнутость магнитопровода.
Назначение индуктора – создавать магнитный поток при пропускании тока по обмотке возбуждения.
Якорь состоит из зубчатого сердечника и обмоток, уложенных
впазах сердечника, которые называются обмотками якоря. Сердечник якоря выполнен из листовой электротехнической
стали (толщиной 0,5 мм), из которой штампуют диски с пазами. Диски покрыты изоляционным лаком для уменьшения потерь от вихревых токов.
Обмотки якоря представляют собой секции в виде катушек, выполненных из изолированного медного провода.
Схемы обмоток бывают петлевые или волновые, катушки могут быть соединены последовательно и параллельно. Простую петлевую обмотку имеют двухполюсные машины малой мощности
157
(до 1 кВт) и машины мощностью свыше 500 кВт; простая волновая обмотка применяется для машин малой и средней мощности (до 500 кВт) при напряжении 110 В и выше.
Назначение якоря – создавать электромагнитный вращающий момент путем взаимодействия тока в обмотке якоря с магнитным полем полюсов, создаваемым током возбуждения.
Коллектор – полый цилиндр, состоящий из клинообразных медных пластин (в виде «ласточкина хвоста»), изолированных друг от друга и от корпуса. Пластины коллектора изолируются также от вала машины.
Коллектор в собранном виде насаживается на вал якоря. К пластинам коллектора припаивают начала и концы секции обмотки, размещенной в пазах якоря.
На коллекторе устанавливаются неподвижные электро-графи- товые щетки. Вращающаяся обмотка якоря соединяется с внешней цепью скользящим контактом между щетками и коллектором.
Щетки делят замкнутую обмотку якоря на параллельные ветви, число параллельных ветвей равно числу щеток, таким образом, ЭДС на щетках (ЭДС машины) равна ЭДС одной параллельной ветви.
Коллектор является электромеханическим преобразователем и обеспечивает создание постоянного по направлению вращающего момента (для двигателей) путем изменения направления тока в проводниках якорной обмотки, перемещающихся из зоны одного полюса
взону другого.
Вгенераторах коллектор обеспечивает выпрямление переменной ЭДС, индуктируемой во вращающейся обмотке якоря.
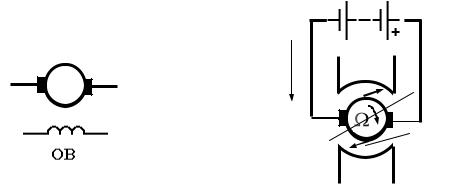
Обозначение ДПТ на электрических схемах и принцип его действия показаны рис. 97 а, б.
а |
б |
Я1 |
Я2 |
N |
|
||
Н1 |
Н2 |
IЯ |
|
|
FЭМ |
|
|
S |
|
|
Рис. 97 |
158

Напряжение от источника постоянного тока подается на зажимы неподвижного якоря. Пусть направление тока в якоре Iя будет таким, как показано на рис. 97, б.
В обмотку возбуждения, находящуюся на полюсах индуктора также подается постоянный ток, который создает магнитное поле, пронизывающее якорь. Если полюса индуктора выполнены из магнитотвердого материала, то обмотки возбуждения на них может и не быть, магнитное поле все равно будет создаваться противоположно намагниченными полюсами (N и S).
За счет взаимодействия магнитного поля полюсов и тока якоря образуются электромагнитные силы FЭМ, которые создают вращающий момент
M CмФI я ,
где См – коэффициент пропорциональности; Ф – поток возбуждения ДПТ; Iя – ток якоря ДПТ.
Во вращающемся в магнитном поле якоре ДПТ наводится ЭДС, которая противоположна направлению тока якоря, поэтому эта ЭДС называется обратной или противо ЭДС
E CE Фn ,
где CE – коэффициент пропорциональности; Ф – поток возбуждения ДПТ; n – частота вращения ДПТ.
Основное уравнение двигателя
Uc = E + Iя Rя,
где Uс – напряжение сети; Iя – ток якоря; Rя – сопротивление обмотки якоря.
Откуда величина тока якоря
Iя UсRя E .
159

Подставив в это выражение значение Е, получим частоту вращения двигателя постоянного тока:
n |
U с |
I я Rя |
. |
|
CE Ф |
||||
|
|
|||
Из этого выражения видно, что частота вращения ДПТ зависит от величины подводимого напряжения, тока возбуждения (потока
ФIв), сопротивления якорной цепи Rя и нагрузки на валу Iя.
13.3. Типы двигателей постоянного тока
По способу соединения обмотки возбуждения и обмотки якоря ДПТ подразделяются на следующие типы:
–ДПТ с независимым возбуждением (рис. 98, а);
–ДПТ с последовательным возбуждением (рис. 98, б);
–ДПТ с параллельным возбуждением (рис. 98, в);
–ДПТ со смешанным возбуждением (рис. 98, г).
УДПТ с независимым возбуждением обмотка возбуждения и обмотка якоря питаются от разных источников. Обмотка возбуждения обозначается: Н1 – Н2 (рис. 98, а).
Двигатели большой мощности обычно выполняют с независимым возбуждением.
УДПТ последовательным возбуждением обмотка возбуждения, подсоединенная последовательно к обмотке якоря, называется сериесной (C1 – C2, рис. 98, б).
Удвигателей с последовательным возбуждением вращающий момент при нагрузке возрастает больше, чем у двигателей с параллельным возбуждением, при этом частота вращения двигателя уменьшается. Это свойство определяет широкое применение ДПТ в машиностроительных электровозах, городском транспорте.
Однако пуск двигателя с последовательным возбуждением без нагрузки недопустим, так как частота вращения двигателя может превысить допустимую частоту, а это может привести к аварии – двигатель идет «вразнос».
УДПТ с параллельным возбуждением обмотка возбуждения, соединенная параллельно с обмоткой якоря, называется шунтовой
(Ш1 – Ш2, рис. 98, в).
160
Двигатели с параллельным возбуждением обеспечивают устойчивую частоту вращения при различных нагрузках и возможность плавного регулирования этой частоты вращения. Поэтому ДПТ с параллельным возбуждением применяются для электропривода, требующего постоянства частоты вращения при различных нагрузках
иплавного широкого регулирования ее.
УДПТ со смешанным возбуждением на полюсе имеются две обмотки возбуждения, одна из которых подсоединяется последовательно к обмотке якоря, а другая – параллельно (рис. 98, г).
а |
|
б |
|
|
– |
+ |
|
||
– |
+ |
|||
|
|
|||
Н1 |
Н2 |
|
С2 |
|
|
|
|
|
С1 |
Я1 |
Я2 |
|
|
Я2 |
Я1 |
– |
+ |
|
в
– +
Я1 |
Я2 |
Ш2 Ш1
Рис. 98
г
– +
С2
С1 |
|
Я1 |
Я2 |
Ш2 |
Ш1 |
Двигатели со смешанным возбуждением устраняют некоторые недостатки, например, такому двигателю не угрожает «разнос» по причине наличия параллельной обмотки возбуждения, которая обеспечивает перевод двигателя электропоезда в режим торможения с отдачей энергии в сеть при его движении по инерции (под уклон).
ДПТ со смешанным возбуждением имеют наибольший пусковой момент и применяются там, где требуются значительные пусковые моменты или возможны кратковременные перегрузки и большие ускорения – например, для пуска компрессоров.
В зависимости от требований параллельная и последовательная обмотки возбуждения могут быть включены «согласно» или «встречно». При «согласном» включении магнитные потоки обмоток направлены одинаково и складываются, при «встречном» – вычитаются.
161