

1.Механизмы. Классификация механизмов.
Механизм –это техническая система, состоящая из подвижных звеньев, стойки и кинематических пар, образующих кинематические цепи.
Все механизмы предназначены для передачи и преобразования пере- мещений входных звеньев и приложенных к ним силовых факторов в тре- буемые перемещения и силовые факторы выходных звеньев.
В соответствии с областью применения и функциональным назначени- ем выделяют:
механизмы летательных аппаратов;
механизмы станков;
механизмы кузнечных машин и прессов;
механизмы двигателей внутреннего сгорания;
механизмы промышленных роботов (манипуляторы);
механизмы компрессоров;
По виду передаточной функции механизмы подразделяются на две группы.
Механизмы с постоянной передаточной функцией– это механизмы, передаточное отношение которых за цикл работы не изменяется
Механизмы с переменной передаточной функцией– это механизмы, пе- редаточное отношение которых за цикл работы может изменяться в заданном диапазоне
По виду структуры механизмы могут быть:
с постоянной структурой – это механизмы, структура которых за цикл работы не изменяется
с переменной структурой – это механизмы, структура которых за цикл работы может изменяться
По движению и расположению звеньев в пространстве механизмы под- разделяются на плоские, пространственные и сферические.
Плоские механизмы – это механизмы, звенья которых совершают дви- жения в параллельных плоскостях
Пространственные механизмы – это механизмы, звенья которых со- вершают движения в перпендикулярных плоскостях
Сферические механизмы – это механизмы, в которых одно или не- сколько звеньев совершают движения в нескольких плоскостях одновремен- но.
В соответствии с числом подвижностей механизмы подразделяются на две группы:
механизмы с подвижностью больше единицы
механизмы с подвижностью, равной единице
По виду кинематических пар выделяются:
механизмы с высшими кинематическими парами – это механизмы, структура которых содержит хотя бы одну высшую кинематическую пару
механизмы с низшими кинематическими парами – это механизмы, структура которых содержит только низшие кинематические пары. Частным случаем механизмов с низшими кинематическими парами яв- ляются шарнирные механизмы
2. Типовые механизмы. Идеальные механизмы
Типовой механизм– это простой механизм, имеющий при различном функциональном назначении широкое применение в машинах разных видов
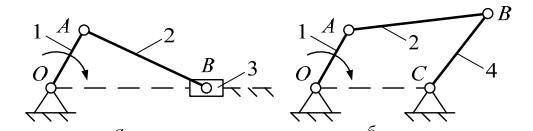
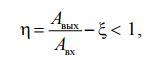
(Кривошип) Этот механизм широко применяется в ма- шинах различных видов, имеющих разное функциональное назначение, на- пример: двигатели внутреннего сгорания, поршневые компрессоры и насосы, станки, ковочные машины и др

Эффективность любого типового механизма оценивается рядом пара- метров, основными из которых являются передаточная функция и коэффици- ент полезного действия (КПД).
Отношение скорости движения входного звена к скорости движения выходного звена называется передаточным отношением:

Каждая техническая система преобразует входной поток механической энергии в соответствующий выходной поток.
Идеальный механизм– это механизм, образованный только абсолютно жесткими звеньями, в котором входной поток механической энергии преоб- разуется в выходной поток без потерь.