

Gusevy_otvety_2
.pdf1. Основные ТТТ, предъявляемые к системам оборудования |
|
|
1) Высокая надёжность |
2) |
минимальная масса и габариты |
а) вероятность исправной работы P(t)→1 |
3) |
ремонтно-эксплуатационная |
б) время наработки на отказ Тотк →∞ |
технологичность |
|
в) интенсивность отказов λ→0 |
4) |
низкая стоимость. |
2. Методы обеспечения надежности бортовых систем |
|
|
|
|
|
|
|
|||||||||
1) |
Применение высоконадёжных элементов |
|
|
|
3) |
Применение систем прогнозирования и |
|
|||||||||
2) |
Применение систем дублирования и |
|
|
|
|
диагностики |
|
|
|
|||||||
|
резервирования |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||||||||
3. Специальные требования к системам оборудования |
|
|
|
|
|
|
||||||||||
1) |
Сохранение |
работоспособности при |
любом |
3) |
Достаточная |
механическая |
прочность |
и |
||||||||
|
положении в пространстве |
|
|
|
|
|
|
|
устойчивость |
|
|
|
||||
2) |
Достаточная термическая стойкость |
|
|
|
4) |
Электромагнитная совместимость |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
5) |
Достаточная радиационная стойкость |
|
||
|
|
|
|
|
|
|
|
|
|
|||||||
4.Классификация погрешностей. |
|
|
|
|
|
|
|
|
|
|
||||||
1) |
Все погрешности вне зависимости от причин |
|
а) методическая (несовершенство метода |
|||||||||||||
|
делятся: |
|
|
|
|
|
|
|
|
|
|
измерения) |
|
|
|
|
|
а) абсолютная ∆ = измер − дейтсв |
|
|
|
|
б) инструментальная (несовершенство средства |
||||||||||
|
б) относительная = ∆⁄ |
|
|
100% |
|
|
|
|
измерения) |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
3) |
В зависимости от постоянства |
|
|
|||
|
|
|
|
|
|
дейтсв |
|
= |
|
|
||||||
|
в) |
относительная |
приведённая |
|
а) статические |
|
|
|
||||||||
|
∆⁄( |
|
− |
100% |
|
|
|
|
|
|
|
б) динамические |
|
|
|
|
|
|
|
min ) |
|
|
|
|
|
|
|
4) |
В зависимости от повторяемости |
|
|
||
2) В зависимости от причин: |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
а) систематические |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
б) случайные
5.класс точности прибора.
Максимальное значение относительной приведённой погрешности. = ∆⁄( − min ) 100%
Класс точности ≤ 1 – образец Класс точности ≤ 4 – самый грубый
6. Состав приборов контроля работы силовой установки
1) |
Измерение давления (манометры) |
|
|
4) |
Измерение расхода топлива (расходомер) |
|||
2) |
Измерение температуры (термометры) |
|
|
5) |
Измерение скорости вращения (тахометры) |
|||
3) |
Измерение количества топлива (топливомер) |
6) |
Измерение уровня вибрации ( |
) |
||||
|
|
|
|
|
|
|
||
7. Состав пилотажно-навигационных приборов |
|
|
|
|
|
|
||
1) |
Измерение высоты полёта |
|
д) путевая |
|
|
|
- астрокомпас |
|
|
а) абсолютная |
3) |
Измерение |
углового |
|
- гиро-компас |
||
|
б) относительная |
|
положения самолёта |
|
|
б) крена (авиагоризонт) |
||
|
в) истинная |
|
а) курс |
|
|
|
в) тангажа (авиагоризонт) |
|
2) |
Измерение скорости полёта |
|
- радио-магнитный |
4) |
Измерение географических |
|||
|
а) истинная |
|
компас |
|
|
координат |
(навигационные |
|
|
б)приборная |
|
- |
магнитный |
|
координаторы) |
||
|
(индикаторная) |
|
компас |
|
5) |
Системы Автоматического |
||
|
в) относительная |
|
- |
индукционный |
|
Управления (САУ) |
||
|
г) вертикальная |
|
компас |
|
|
(автопилот) |
|
|
8. Что называется электродистационной передачей (ЭДП)
ЭДП (электро-дистанционный передатчик) – устройство обеспечивающее передачу информации на расстояние с однозначным соответствием на входе и выходе этого устройства.
Состоит из: |
|
|
|
|
|
|
|
1) |
Датчика |
|
б) индуктивные |
|
а) аналоговые |
||
2) |
Линии связи |
|
в) ёмкостные |
|
б) цифровые |
|
|
3) |
Указателя |
|
г) генераторные |
|
5) По способу |
отображения |
|
Классификация |
3) |
По виду указателя |
|
информации |
|
||
1) |
По роду тока |
|
а) гальванометрические |
а) нашкальные |
|||
|
а) на постоянном |
|
б) логометрические |
б) цифровые |
|
||
|
б) на переременном |
|
в) компенсационные |
в) |
индикаторные |
||
2) |
По виду датчика |
4) |
По |
виду |
передачи |
(дисплейные) |
|
|
а) реостатные |
|
информации |
|
г) паравизуальные |
||
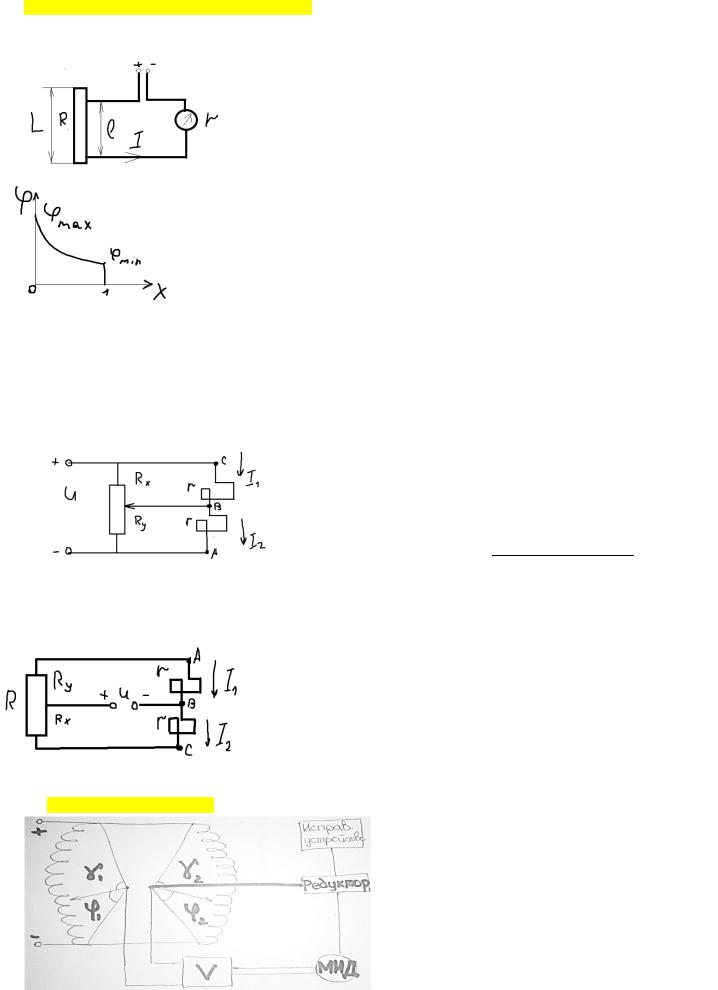
9. Гальванометрическая ЭДП на постоянном токе.
Гальванометр используют в качестве аналогового измерительного прибора. Используется для измерения силы постоянного тока, протекающего в цепи.
|
|
|
= , где Х − относит. координата = |
⁄ |
||||
|
|
|
|
|
|
|
= (от0до1) |
|
|
|
= ⁄ |
|
|
|
|
||
|
|
|
+ |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
||
|
|
= ⁄ |
|
+ |
|
|
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Минусы: |
|
|
|
|
|
|
1) |
Влияние питающего напряжения на показания |
|||||||
2) |
Температурные погрешности |
|
||||||
3) |
Ограничения угла поворота выходной оси |
|
||||||
|
|
|
указателя |
|
|
|
||
4) |
Неравномерность шкалы, из-за нелинейной |
|
||||||
|
|
|
характеристики |
|
||||
5) |
Влияние сопротивления токопроводящей линии |
|||||||
|
|
|
|
|
|
|
|
|
|
10.Логометрические ЭДП на постоянном токе. |
|
|
|
|
|
|
|
Логометр — магнитоэлектрический электроизмерительный прибор для |
измерения отношения сил двух электрических |
|||||||
токов. Подвижная часть выполнена в виде двух рамок, расположенных перпендикулярно. Логометр обычно применяется в
приборах для измерения сопротивления, индуктивности, ёмкости, температуры. |
|
|
|
|
|
|
|
|
||||||||||
|
1 |
|
|
|
|
|
|
|
|
( |
+ ) |
|||||||
= ( |
⁄2) |
1 |
|
= |
|
= |
|
|
|
|
|
|
|
|
||||
|
|
|
|
( |
|
+ ) |
|
|||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
Параллельная схема |
|
|
|
|
|
( |
+ ) |
|
|
|
||||||||
1 |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
( |
+ ) |
|
|
|
|||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
X=от0 до1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= (1 − ) |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
= |
|
|
|
|
|
ХЗ что за К. Кто знает уведомите. |
||||||||||
|
|
1 |
|
= |
( (1 − ) + ) |
|
||||||||||||
|
|
|
|
|
|
(1 − ) ( + ) |
||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[ (1 − ) + 1] = (1 − ) ( + 1)
Основные минусы гальванометрического устранены, но появляется недостаток:
В случае нарушения контакта между щёткой и потенциометром стрелка указателя устанавливается по середине шкалы.
Последовательная схема
|
|
= X=от0 до1 |
|
|||
|
|
|
|
|
|
|
|
|
= (1 − ) |
|
|
||
|
|
|
|
|
||
1 |
|
= |
+ |
= |
+ 1 |
|
|
|
|
(1 − ) + |
|
(1 − ) + 1 |
|
2 |
|
|
|
|
|
|
Угол отклонения стрелки ограничен Напряжение не влияет на показания
|
|
|
|
|
|
+ |
1 |
= |
|
= |
|
|
|
|
|
|
|
|
+ |
|
2 |
|
|
|
|
|
|
11. Компенсационная ЭДП.
Разность напряжений реостатов должна быть равна 0. При изменении угла φ1 она не равна 0, появляется ток, который питает двигатель, а тот подводит угол φ 2 до значения φ 1 и тем самым уравнивает напряжения
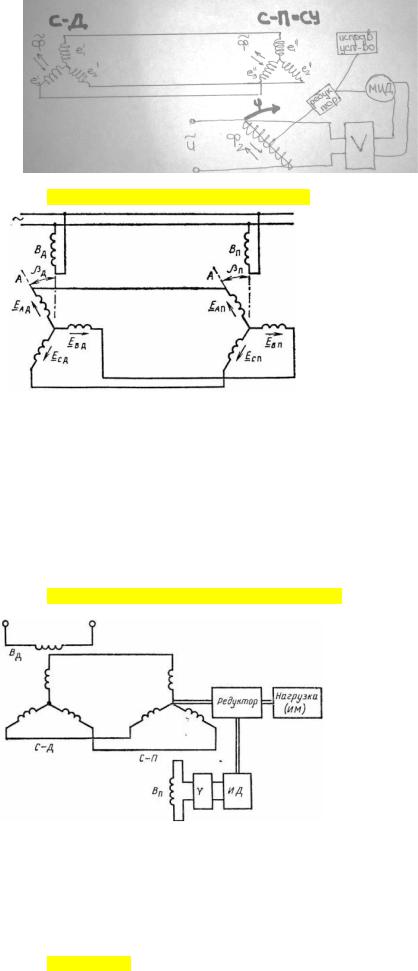
При повороте ротора С-Д на угол φ в статорных обмотках СД наводится ЭДС. Под действием ЭДС в статических обмотках СД и СУ начинают протекать токи, создающие ΣФ҇. В результате этот ΣФ҇в СП пронизывает роторную обмотку и наводит в ней выходную ЭДС, которая усиливается и поступает на малый инерционный двигатель, поворачивающий ротор СП до согласованного положения, одновременно поворачивая исполняющее устройство.
12. Индикаторный режим работы сельсина
Сельсин – мини электромашина, у которой при повороте ротора на определенный угол в статорных обмотках наводятся ЭДС, пропорциональных углу поворота.
Один из сельсинов называется датчиком, а другой приемником. Иногда один сельсин-датчик управляет несколькими приемниками. В индикаторном режиме осуществляется дистанционная передача угла. При этом внешний нагрузочный момент на валу сельсина-приемника практически отсутствует.
Обычно вал сельсина-приемника поворачивает стрелку или шкалу измерительного прибора, движок реостата и т. п. Если углы поворота соответствующих обмоток фаз сельсина-датчика βд и сельсина-приемника βп по отношению к осям полюсов одинаковы (βд = βп), а обмотки возбуждения сельсинов ВД и ВП включены в одну и
ту же сеть, то пульсирующие магнитные поля, созданные этими обмотками, наведут в соединенных друг с другом одноименных обмотках синхронизации одинаковые ЭДС: ЕАД = ЕАП; ЕВД = ЕВП; Ес,д = Ес,п
Одноименные ЭДС сельсина-датчика и сельсина-приемника имеют встречное направление, поэтому в обмотках синхронизации не возникает токов и электромагнитные моменты сельсинов равны нулю.
Если теперь повернуть ротор сельсина-датчика на какой-то угол Δβ1 = βд-βп, то одноименные «фазы» сельсинов окажутся не в одинаковых условиях по отношению к магнитным полям и их ЭДС не будут равны (ЕАд ≠ ЕАп). Вследствие этого в обмотках синхронизации возникнут токи, которые, взаимодействуя с магнитными полями, создадут вращающие моменты. Моменты, действующие на роторы сельсина-датчика и сельсина-приемника, направлены в противоположные стороны и под их влиянием угол рассогласования Δβ1 уменьшится. Если при повороте на Δβ1 ротор сельсина-датчика будет закреплен, то ротор сельсина-приемника под действием возникшего момента также повернется на угол Δβ1 и опять, будет выполняться равенство β'Д = β'П.
Передача угла с погрешностью 0,25-2,500.
13. Трансформаторный режим работы сельсина.
Отличие этой схемы от схемы индикаторного режима в том, что однофазная обмотка ВП сельсина-приемника СП не включается в сеть переменного тока, а подключается к управляющему блоку усилителя У. При подаче питания в обмотку возбуждения Вд сельсина-датчика СД в обмотках синхронизации потечет ток, который в сельсине-приемнике создаст пульсирующий магнитный поток.
В исходном положении ротор этого сельсина должен быть расположен так, чтобы его ось была ориентирована перпендикулярно оси пульсирующего магнитного потока. В этом случае оси обмоток Вд и ВП будут сдвинуты в пространстве на 90° и напряжение на выводах обмотки ВП равно нулю. На усилитель СУ не будет подаваться сигнал, и он не будет давать питание на исполнительный двигатель ИД. Система будет
неподвижна.
Если теперь повернуть ротор сельсина-датчика С-Д на какой-либо угол α, то токи в обмотках синхронизации изменятся, и ось магнитного потока в сельсине-приемнике СП повернется на тот же угол. При этом появится напряжение на обмотке ВП, пропорциональное sin α. На вход усилителя У поступит сигнал. Усиленный сигнал от У поступает на двигатель ИД, который приводит в действие исполнительный механизм ИМ и одновременно поворачивает ротор сельсина-приемника в такое положение, когда его обмотка ВП снова будет сдвинута на 90° относительно оси обмотки Вд. В этом положении подача сигнала на усилитель прекращается и привод останавливается. Таким образом, исполнительный механизм будет повторять повороты или вращение ротора сельсина-датчика.
14. Магнесин.
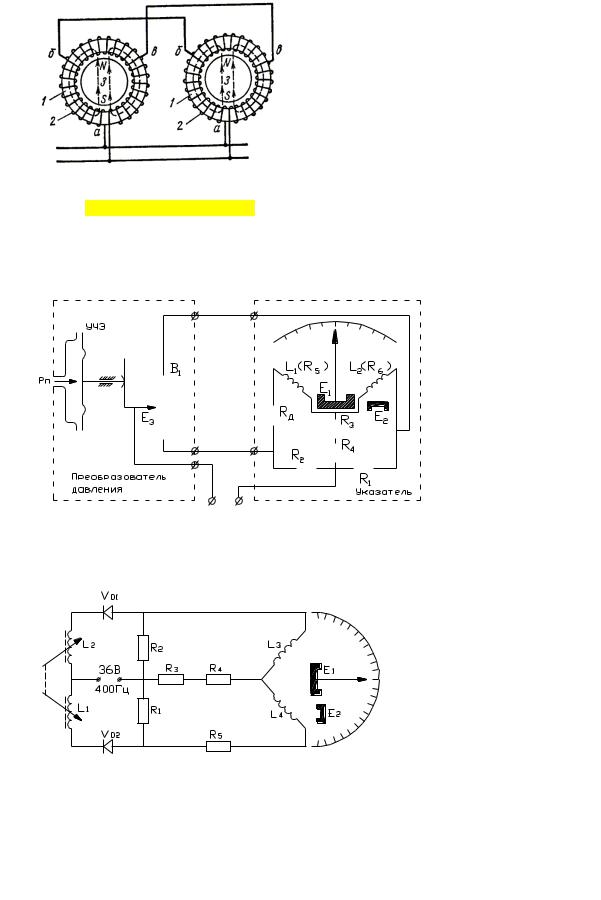
Магнесин — бесконтактный преобразователь (датчик) углового положения вала. Применяется для дистанционной передачи показаний измерительных приборов и в других устройствах, где допускается ничтожно малая нагрузка на задающем валу (в частности, в магнитных компасах).Система для дистанционной передачи состоит из магнесина-датчика и магнесина-приемника, которые представляют собой тороидальные электромагниты переменного тока (статоры) с сердечниками из низкокоэрцитивного материала, питающиеся от общего источника и соединенные между собой проводами (т. е. выполнена линия связи). Внутри катушек находятся свободно поворачивающиеся постоянные магниты (роторы). В случае идентичных магнесинов при всяком повороте оси магнесина-датчика ось магнесинаприемника поворачивается на тот же угол. Если их роторы занимают неодинаковое положение, то по обмоткам и проводам линии связи текут уравнительные токи, вызывающие устанавливающий (синхронизирующий) вращательный момент.
Фрот = МДС/ (Rвозд + Rст + Rрот); |
Ф=В/δ; |
μ=В/Н; |
где В – индукция засчет переменного напряжения, δ- |
, μ – проницаемость, Н - напряженность |
|
15. Манометры типа ЭДМУ
В электромеханических манометрах силы измеряемого давления преобразуются в перемещение упругого чувствительного элемента (УЧЭ), которые воздействуют на параметры измерительных электрических схем (L или С). Преобразователь давления устанавливается непосредственно на объекте контроля, что позволяет отказаться от соединительных трубопроводов большой длины, избавиться от ряда погрешностей, упростить монтаж и эксплуатацию манометров.
Измеряемое давление Рп подается в УЧЭ, который
связан с щеткой Е3 потенциометра В1 через
передаточный механизм. Значения сопротивления R7
и R8 потенциометра преобразователя давления
меняющиеся в зависимости от давления Рп. Рамки
логометра L1 и L2 и резистор RD составляют
измерительную диагональ моста.
Общая точка соединения рамок подключена к полудиагонали, состоящий из резисторов R3 и R4. Они предназначены для компенсации температурных погрешностей, вызванных изменением сопротивления рамок логометра при колебаниях окружающей среды.
16) Манометры типа ДИМ. |
|
|
|
|
|
Принципиальная электрическая схема манометра типа ДИМ показана на рисунке 2. |
|
|
|
||
Недостатки потенциометрических преобразователей |
|||||
связанных с износом потенциометра, нарушением контактов |
|||||
при вибрациях и колебаниях измеряемого давления, |
|||||
повышенных температурах, устранены в дистанционных |
|||||
индуктивных манометрах типа ДИМ. Это обеспечивает |
|||||
применение дифференциального индуктивного |
|||||
преобразователя. Манометры этого типа применяются для |
|||||
измерения давления при повышенных температурах их |
|||||
значительных высокочастотных попомехах (до 700Гц.) |
|||||
|
В качестве УЧЭ применяется либо гофрированные |
||||
мембраны, либо мембранные коробки. Жесткий подвижный |
|||||
центр |
УЧЭ |
соединен |
с |
якорем |
индуктивного |
преобразователя. Катушки индуктивного преобразователя L1 и L2 совместно с резисторами R1 и R2 образуют мостовую |
|||||
схему, которая работает на переменном токе 36В 400 Гц. |
|
|
|
|
|
В диагональ мостовой схемы включены рамки логометрического указателя. При измерении давления деформация |
|||||
УЧЭ передается на якорь, который изменяет воздушный зазор в магнитных цепях катушек L1 и L2. Это вызывает изменения |
|||||
индуктивности катушек и ведёт к перераспределению токов в рамках логометрах. Так как логометр работает на постоянном |
|||||
токе, то в качестве выпрямителей в измерительную схему введены диоды Д1 и Д2. Максимальные погрешности манометров |
|||||
типа ДИМ составляет ±4%, размах шкалы указателя 120. |
|
|
|
|
|
17. Термометры сопротивления |
|
|
|
|
|
Принцип действия термометра основан на изменении |
электрического |
сопротивления |
металлического |
||
чувствительного элемента в зависимости от температуры.
Термометр сопротивления ТЭУ-48 предназначен для дистанционного измерения температур масла, охлаждающей жидкости и воздуха. Максимальный диапазон измерения прибора –70…+150°С, рабочий диапазон –40…+130°С.

Указатель
Датчик
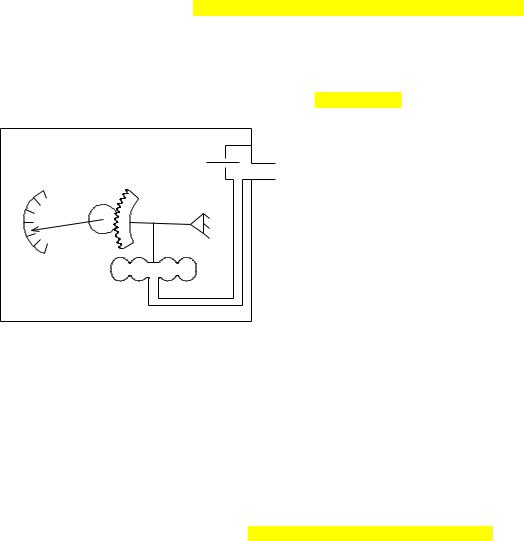
Термометр ТЭУ-48 собран по несимметричной схеме неуравновешенного моста с двумя диагоналями bd и bc, датчик включается в одно из плеч моста.
Сопротивления схемы подобраны так, что при сопротивлении датчика, соответствующем температуре –50°С и равном 73,7 Ом, потенциал точки b равен потенциалу точки c и ток в катушке R9 равен нулю, а через катушку R10 в направлении от точки d к точке b протекает максимальный ток. При этом подвижный магнит занимает крайнее левое положение и прибор показывает –
50°С.
При возрастании температуры и соответствующем
изменении сопротивления датчика потенциал точки b возрастает.
Ток в катушке R10 уменьшается, а в катушке R9 увеличивается,
протекая от точки b к точке c. Вектор результирующего магнитного поля и подвижный магнит отклоняются в направлении конца шкалы.
При температуре +50°С, когда сопротивление датчика равно 108,65 Ом, разности потенциалов Ud-b – Ub-c и токи в катушках R9 и R10 равны между собой по величине. Этот момент соответствует среднему положению подвижного магнита. Дальнейшее повышение температуры сопровождается ещё большим увеличением сопротивления датчика, повышением потенциала точки b и увеличением тока в катушке R9. При температуре +150°С потенциал точки b становится равным потенциалу точки d, ток в катушке R10 становится равным нулю, а в катушке R9 возрастает до максимума. Этот момент соответствует крайнему правому положению магнита, когда стрелка прибора указывает температуру +150°С, а сопротивление датчика равно 153,1 Ом.
По сравнению с применявшимися ранее для термометров симметричными схемами с логометром схема ТЭУ-48 имеет преимущество, что обеспечивает более высокую чувствительность и виброустойчивость прибора. Достоинством схемы является то, что при обрыве цепи датчика стрелка прибора не останавливается на середине шкалы, а отклоняется к концу шкалы, а при обрыве цепи питания возвращается к началу шкалы. Таким образом, можно сразу заметить ненормальность в работе прибора. Эта схема обеспечивает лучшую температурную компенсацию.
Сопротивления R12, R2 + R3, R4 + R5 составляют три постоянных плеча моста. Обычно в мостовых схемах все постоянные сопротивления изготавливают из медной проволоки. Ею намотано и сопротивление R3. Медные сопротивления применяют с целью компенсации температурной погрешности, которая может возникнуть в связи с изменением сопротивлений катушек R9 и R10 с температурой.
Сопротивление R1, включенное в цепь питания приборов, предназначено для понижения напряжения питания с 27 В до 13,5 В, на которое рассчитана схема.
Промежуточное плечо, состоящее из сопротивлений R4 и R5, служит для регулирования размаха шкалы прибора. Уменьшая сопротивление R4 + R5, можно увеличить чувствительность прибора на крайних точках шкалы и тем самым расширить диапазон измеряемых температур.
Провода линии связи, соединяющие датчик с указателем, являются частью плеч моста. Поэтому величина сопротивления этих проводов не будет влиять на показания в известных пределах.
Прибор градуируется при сопротивлении соединительных проводов 0,16 Ом, т. е. при сечении провода 0,75 мм2 и длине 3 м. В этом случае минус выводится около указателя, если же длина провода больше 3 м, то минус выводится около датчика. В этом случае сопротивление плюсового провода, идущего от указателя к датчику, компенсируется сопротивлением минусового провода, идущего от датчика к указателю.
Применяя более совершенную конструкцию логометра в приборе ТЭУ-48, удаётся максимальную погрешность снизить примерно в 2 раза по сравнению с другими термометрами сопротивлений.
Для рабочей части шкалы –40…+130°С максимальная погрешность составляет при температурах окружающей среды +20+5°С – менее 3 %, +50+5°С – около 4 %, -60+5°С – около 4,5 %.
18)Термоэлектрические термометры.
Различные металлы содержат разное число свободных электронов на единицу объема. Представим, что в металле А это число равно n1 м-3, а в металле В - n2 м-3.Когда А и В приведены в соприкосновение так, чтобы электроны могли свободно двигаться от одного к другому (см. рис.), то происходит перераспределение электронов между металлами до тех пор, пока их число на единицу объема в металлах А и В не будет одинаковым, скажем, n.
Таким образом, если А теряет электроны, то он приобретет в конечном итоге положительный заряд, и если В приобретает электроны, то станет отрицательно заряженным. Так в месте контакта возникает электродвижущая сила. Будет ли проходить ток в цепи, зависит от того, что происходит на других концах
проводников А и В.
Ясно, что эти концы должны быть соединены или непосредственно, или с помощью другого проводника. Заряд в цепи будет протекать только в том случае, если две нары концов будут находиться при разной температуре. Возникающая электродвижущая сила неестественно, сила тока зависят от
температурного интервала. Медные соединительные провода не оказывают влияния на электродвижущую силу.
Таким образом, одна пара спаянных концов помещена в то место, где измеряется температура, другая пара концов находится на удалении от места измерения и соединена с чувствительным гальванометром. Отклонение стрелки гальванометра пропорционально электродвижущей силе:
θ = (Еθ - E0) / (Е100 - E0)
Преимущества термоэлектрического термометра следующие:
o он имеет низкую теплоемкость и может применяться для измерения колеблющихся температур;
o он имеет очень большой диапазон: от —200 °С до 1500 °С в зависимости от металлов, образующих термопару;
oон может измерять температуру в точке.
19.Классификация приборов для измерения количества топлива
Топливомер - прибор, измеряющий объемное или весовое количество топлива или масла в баках. Применяются для измерения уровня топлива в наземном транспорте и летательных аппаратах, в отличие от уровнемеров, измеряющих уровень жидкостей или сыпучих материалов в различных резервуарах и хранилищах. Как правило непосредственное измерение количества топлива крайне затруднено, поэтому применяются косвенные измерения, в которых, например, измеряют высоту
или давление топлива в баке. |
|
|
|
Классификация топливомеров |
|
|
|
По методу измерения: |
По области использования: |
||
|
Поплавковый; |
|
Авиационные; |
|
Манометрический; |
|
Автомобильные |
Емкостной.
Особенности измерения уровня топлива Несмотря на то, что топливомеры и уровнемеры используют одни и те же методы измерения, между ними существуют
принципиальные различия, вызванные различными объектами измерения:
1.Топливные баки имеют ограниченные размеры, что накладывает ограничения на используемые датчики уровня;
2.Топливные баки могут иметь весьма сложную форму, что вынуждает использовать профилированные датчики уровня;
3.Под действием сил и ускорений происходит перераспределение топлива в баке, что приводит к появлению погрешности измерения;
4.Для летательных аппаратов с несколькими топливными баками необходимо осуществлять центровку перекачки топлива из одного бака в другой для стабилизации центра масс летательного аппарата.
20)Электроемкостной топливомер
Внастоящее время широкое распространение получили электроемкостные топливомеры и масломеры.
Емкостные топливомеры состоят из датчика, расположенного в топливном баке, и указателя, смонтированного на приборной доске самолета. В комплект прибора входит также блок измерения, содержащий усилительно-преобразующие и коммутационные элементы.
Принцип действия электроемкостных топливомеров основан на зависимости емкости конденсатора от уровня и диэлектрической проницаемости жидкости, находящейся между его электродами.
Датчиком электроемкостного топливомера является конденсатор, составленный из двух или более концентрично расположенных труб, помещаемых в топливный бак.
При заполнении баков топливом заполняются зазоры между трубами, а так как диэлектрическая проницаемость топлива и воздуха различна, то изменение уровня топлива в баках приводит к изменению электрической емкости датчика.
C=,
где: e1- диэлектрическая проницаемость воздуха; e2- диэлектрическая проницаемость топлива; l1-длина датчика не заполненного топливом; l2- длина датчика заполненного топливом; d1-диаметр внутренней трубы датчика; d2- диаметр внешней трубе датчика.
21. К чему сводится задача измерения количества топлива?
Количество топлива – это уровень высоты столба топлива Задача сводится к измерению уровня высоты столба топлива
Расход топлива – это скорость истечения топлива из трубопровода Топливомеры: механические, электрические ультразвуковые, радиационные, электроемкостные
22.Виды расходомеров.
Механические, турбинные, тепловые, индукционные, изотопный, гидромеханический
23. Виды тахометров
Механические (центробежные), магнитоиндукционные, электрические, оптические (страбоскопические), дистанционные
24.Преимущества процентной шкалы по сравнению со шкалой в оборотах в минуту
Процентная шкала лучше, потому что она дает не только количественные, но и качественные
25.Основные параметры вибрации
Вибрация – механические колебания
–амплитуда виброперемещения -  , м;
, м;
–амплитуда колебательной скорости (виброскорости) -  , м/с;
, м/с;
–амплитуда колебательного ускорения (виброускорения) -  , м/с2;
, м/с2;
–период колебаний – Т, с;
–частота колебаний –f, Гц=1/с.
26.Измеритель вибрации.
Для измерения уровня вибраций частей конструкции ЛА и авиадвигателей используются бортовые виброизмерительные приборы серии ИВ. Датчик вибраций ДВ представляет собой неизменный магнит ПМ, помешенный снутри катушки К, закрепленной на корпусе устройства (см. рис. 3.18). Магнит при помощи пружин ПР1 и ПР2 центрируется на оси измерения датчика. При наличии вибраций элемента конструкции ЛА либо авиадвигателя корпус датчика с катушкой колеблется относительно неизменного магнита, фактически остающегося в покое. При всем этом в катушке индуктируется ЭДС, величина которой пропорциональна скорости перемещения магнита относительно катушки. Приобретенное на выходе катушки напряжение усиливается в электронном блоке БЭ и поступает на указатель измерителя вибраций (либо лампочки сигнализации).
27. Виды высот полета
Абсолютная, относительная, истинная Высота полёта — расстояние по вертикали от определённого уровня отсчёта до воздушного судна.
Определяется высотомерами различных конструкций. В зависимости от уровня начала отсчёта различают высоты[2]:
истинную (от уровня точки, находящейся непосредственно под воздушным судном),
относительную (от какого-либо условного уровня — уровня порога ВПП, уровня аэродрома, наивысшей точки рельефа и т. п.),
абсолютную (от уровня моря).
Высоты полёта делят на предельно малые, малые, средние и большие[2]:
предельно малые — отличаются в зависимости от типа и скорости летательного аппарата;
малые — от предельно малых до 1000 м;
средние — от 1000 до 5000 м;
большие — свыше 5000 м.
Безопасная высота полёта — минимально допустимая высота полета, гарантирующая воздушное судно от столкновения с земной (водной) поверхностью или препятствиями на ней.
От высоты полёта следует отличать эшелон, занимаемый воздушным судном. Эшелоны отсчитываются по стандартному атмосферному давлению и имеют определенные нормативными документами значения[источник не указан 439 дней]:
от 1000 до 5000 метров — 20гра.
от 5000 до 10000 метров — 30гра.
от 10000 до 15000 метров — 35гра.
28. Принцип действия барометрических высотомеров
Принцип действия барометрического высотомера основан на измерении давления атмосферы. Известно, что с увеличением высоты уменьшается и текущее атмосферное давление. Данный принцип положен в основу прибора, который на самом деле измеряет не высоту, а давление воздуха. Конструктивно прибор состоит из запаянной коробочки с мембраной, изменение положения которой механически связано со стрелками, перемещающимися вокруг шкалы, проградуированной в цифрах.
29. Виды скоростей полета
Истинная воздушная (скорость перемещения ВС относительно воздушной массы), индикаторная (скорость полета самолета относи тельно воздушного потока у земли при таком же динамическом давлении (скоростном напоре) как на данной высоте или истинная скорость приведенная к нормалной плотности воздуха), относительная (или число М = скорость истинная / а), вертикальная (теоретическая скорость полета относительно земной поверхности ), путевая (Скорость движения самолета или скорость полета самолета относительно поверхности земли)
30.Комбинированный указатель скорости.
Комбинированный указатель скорости КУС730/1100 предназначен для измерения приборной с скорости от 50 до 730 км/ч и истинной воздушной скорости от 400 до 1100 км/ч.
Принцип действия КУС 730/1100 основан на измерении скоростного напора (динамического давления) встречного потока воздуха с автоматическим введением поправки на плотность и сжимаемость воздуха с поднятием на высоту. Основные технические характеристики:
- прибор работает при температуре окружающей среды от + 50 до -60°С;
-прибор работает при вибрации с частотой от 20 до 30 Гц и при перегрузке до 1,1g;
(схема в тетради)
31. Что называется путевой скоростью Путевая скорость летательного аппарата — скорость ЛА относительно земной поверхности. На ее величину влияет ветер,
который уменьшает или увеличивает скорость движения ЛА относительно земной поверхности.
Путевая скорость используется в целях аэронавигации, а также при отображении летательных аппаратов на экранах наземных радаров.
Путевая скорость самолёта может быть получена или вычислена экипажем несколькими различными способами:
На основании визуального наблюдения наземных ориентиров и времени их пролёта.
На основании истинной скорости, а также метереологических данных о направлении и силе ветра на высоте полёта.
На основании истинной скорости и величины сноса, полученной либо визуальным путём, либо при помощи допплеровского измерителя.
На основании данных радионавигации.
На основании данных инерциальной системы навигации.
Напрямую при помощи приборов спутниковой навигации.
32. Методы измерения вертикальной скорости полета.
1 измерение скорости изменения статического давления
2 изменение радиовысотомера
3инерциальный (вертикальное ускорение)
4измерение вертикальной составляющей истиной воздушной скорости
33.Вариометр.
Вариометр— пилотажный прибор, показывающий скорость изменения вертикальной скорости летательного аппарата |
|||||
́ |
|
|
|
|
|
|
|
|
|
|
сообщающегося с атмосферой через каппилярные |
|
|
|
|
|
отверстия. Вариометр замеряет разность давлений воздуха |
подъем |
|
|
|
в атмосфере и внутри корпуса прибора, сообщающегося с |
|
|
|
Рст |
атмосферой капилляром. Эта разность давлений возникает |
||
|
|
|
|
|
|
|
|
|
|
|
при изменении высоты полёта и исчезает, когда |
|
|
|
|
|
летательный аппарат летит на постоянной высоте. |
0 |
|
|
|
|
Предназначен для измерения и индикации вертикальной |
|
|
|
|
|
воздушной скорости ВС при снижении или наборе |
|
|
|
|
|
высоты. Принцип действия основан на измерении |
спуск |
|
|
|
|
скорости изменения статического давления при |
|
|
|
|
|
изменении высоты полёта. В состав конструкции входит |
|
|
|
|
|
блок манометрической коробки, стрелка, капилляр, |
|
|
|
|
|
трубопровод, шкала. |
принцип действия основан на измерении избыточного |
|
||||
давления или разрежения, происходящего при изменении |
|
||||
высоты |
полета |
внутри |
замкнутого |
объема, |
|
В качестве чувствительного элемента используется манометрическая коробка. Внутренняя полость герметичного корпуса прибора сообщается непосредственно с магистралью статического давления через капилляр. Капилляр — стеклянная трубка с отверстием малого сечения. Если самолёт летит горизонтально, то статическое атмосферное давление внутри манометрической коробки и давление внутри корпуса будут одинаковы и стрелка прибора показывает нулевую вертикальную скорость. При изменении высоты полёта изменяется статическое давление. Внутри манометрической коробки это давление устанавливается практически мгновенно, а в корпусе прибора вследствие сопротивления капилляра давление изменяется медленнее чем внутри манометрической коробки. Чем больше вертикальная скорость полета, тем больше разность давлений. Под действием разности давлений манометрическая коробка деформируется. Деформация коробки через передаточный механизм передаётся на стрелку, которая отклоняется от среднего положения вверх при наборе высоты, внизпри снижении.
34. Система воздушных сигналов – СВС Система воздушных сигналов (СВС) современных летательных аппаратов представляет собой программно-аппаратную
систему, предназначенную для измерения, вычисления и выдачи на индикацию экипажу ЛА и в бортовые системы (потребителям) информации о высотно-скоростных параметрах, а также о других параметрах, таких как температура воздуха, углы атаки и скольжения. Состоит из большой группы датчиков - приёмников воздушного давления (приёмников статического давления, динамического давления или комбинированных приёмников полного давления), датчиков заторможенного потока (скоростного напора) и ряда других датчиков, а также трубопроводов передачи давления (т.н. статических "С" и динамических "Д" линий), приборов обработки и преобразования, которые преобразуют получаемую информацию в электрические сигналы ( на которых работает основная масса оборудования самолёта). В децентрализованной СВС на борту самолёта имеется большая группа разнообразных приборов - КВ (корректор высоты), ИЧМ (индикатор числа маха), КЗСП (корректор-задатчик приборной скорости), измерительный комплекс реле давлений (ИКДРДФ) и т.д. Централизованная СВС, как правило, имеет единый вычислитель (например - централь скорости и высоты ЦСВ), который получаёт информацию от приёмников, преобразует её в пропорциональные электрические сигналы и выдаёт потребителям. В децентрализованной СВС в кабине экипажа применяются анероидно-мембранные приборы и указатели: высоты (например, высотомер ВД-20), скорости (например КУС-1500), вариометры и т.д. В централизованной СВС применяются электрические указатели скорости, высоты и других полётных параметров, либо информация выводится на МФИ.
Как правило, даже в самом современном цифровом приборном оборудовании самолёта имеется место для резервного барометрического высотомера и указателя скорости, подключенные непосредствено к приёмникам давления.
Параметры, измеряемые и вычисляемые СВС
Высотно-скоростные параметры
o Барометрическая высота полета o Вертикальная скорость
o Воздушная скорость (истинная и приборная)
oЧисло Маха
Температура наружного воздуха
Температура заторможенного воздуха
Углы атаки и скольжения
Давление (полное и динамическое)
Максимально допустимая воздушная скорость
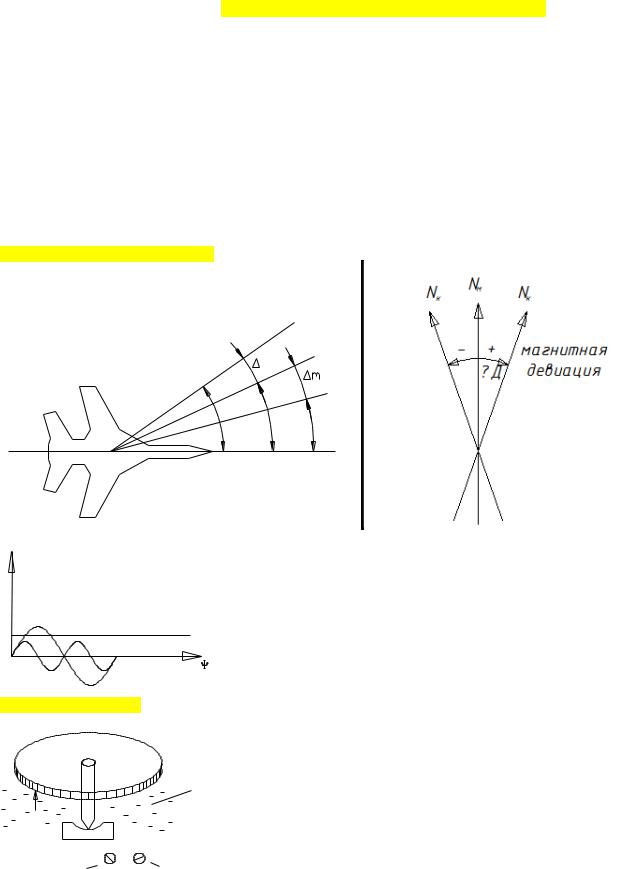
35. Виды курсов полета, что называется углом курса Угол курса - угол между плоскостью меридиана и проекцией продольной оси самолета не плоскость горизонта, отсчитаный
от северного направления по часовой стрелке. Курс, отсчитанный от географического меридиана, называется истинным курсом. Курс, отсчитанный от магнитного меридиана (от направления, показываемого стрелкой, свободной от влияния железных и стальных масс самолета), называется магнитным курсом. Курс, отсчитанный от компасного меридиана (от направления, показываемого компасной стрелкой), называется компасным курсом.
Девиация – несовпадение магнитного и компасного меридиана. Виды девиации:
Постоянная – обуславливается неточностью установки магнитного компаса Полукруговая – обуславливается наличием на борту магнитотвердых материалов
Четвертная - обуславливается наличием на борту магнитомягких материалов (слабые магнитные поля)
36. Методы измерения угла курса |
|
|
|
|
Существуют следующие методы измерения угла курса: |
3. |
Гироскопический; |
||
1. |
Магнитный; |
4. |
Астрономический; |
|
2. |
Индукционный; |
5. |
Радиотехнический. |
|
37. Определение девиации компаса
|
К |
|
ИК |
МК |
КК |
|
||
|
|
Несовпадение |
компасного и магнитного |
|
меридиана объясняется тем, что магнитная стрелка компаса отклоняется от |
||
Д |
|
плоскости магнитно меридиана под действием собственного магнитного поля |
|||
|
самолёта. Угол Δm между направлениями магнитного Nm и компасного Nk |
||||
|
|
меридианов называется магнитной девиацией компаса. |
|||
|
|
Виды девиации: |
|||
2 |
|
|
1. Постоянная - обусловлена неточностью установки МК. |
||
1 |
|
2. Полукруговая - обусловлена наличием на самолёте магнитотвёрдых |
|||
|
|
||||
|
3 |
материалов (постоянные магниты). |
|||
180 |
360 |
|
3. Четверная девиация - обусловлена наличием магнитомягких материалов. |
||
Материалы - которые намагничиваются в слабых магнитных полях. |
|||||
|
|
||||
38. Магнитный компас |
|
|
|
||
Магнитный компас: |
|
|
|
||
|
|
|
|
Лигроин - основное назначение уменьшить силу трения. |
|
|
|
|
|
Fтр Ктр mg . |
|
|
|
лигроин |
|
Принцип работы компаса основан на взаимодействии постоянных магнитов с |
|
|
|
(спирт+глицерин) |
постоянным магнитным полем Земли. |
||
|
|
|
|
||
|
|
|
|
|
|
|
девиционное |
||
пост. |
||||
устройство |
||||
магнит |
||||
|
|
|||
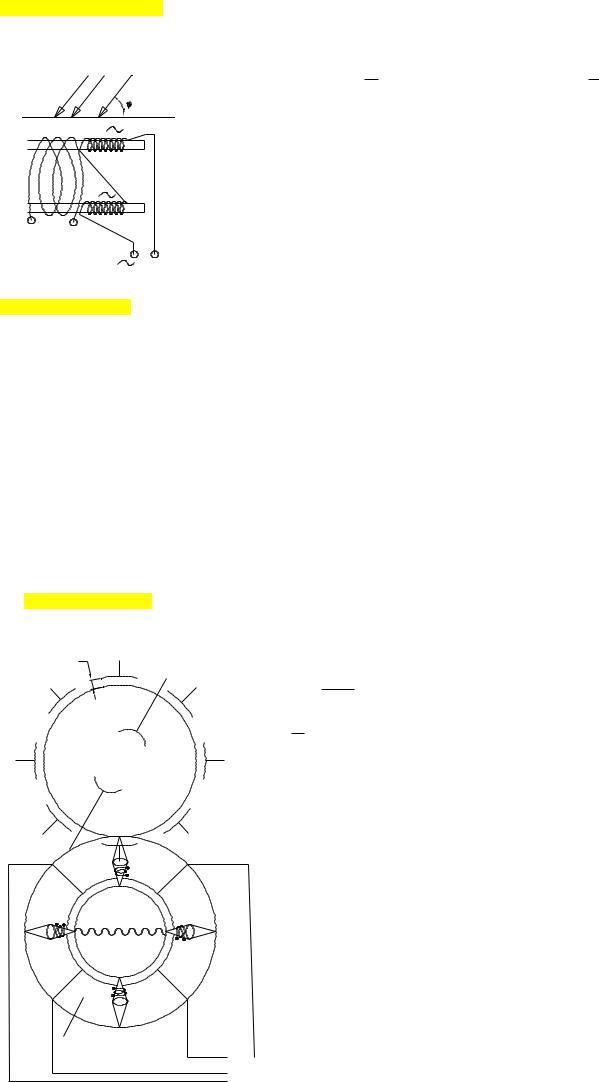
39. Индукционный компас
Принцип действия основан на наведении ЭДС в выходной обмотке чувствительного элемента под действием постоянного
|
|
|
|
магнитного поля Земли, зависящей от угла курса. |
|
|
||||||||||
|
Ф |
|
|
Чувствительный элемент – магнитный зонд. |
|
|
|
|||||||||
|
з |
|
|
|
|
|
|
B |
|
|
|
|
|
Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
, R |
|
2 f , |
маг нитная_ проницаемость, B |
|
||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
M |
|
|
|
H |
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
магнито |
E |
KФ cos |
|
|
|
|
|
|
|
|
|||
|
|
|
|
вых |
|
|
З |
|
|
|
|
|
|
|
|
|
|
=Ф |
Ф |
мягкий |
Постоянное магнитное поле Земли создает в магнитных стержнях постоянный |
||||||||||||
|
з |
материал |
магнитный поток, который не может навести ЭДС в выходной обмотке. |
|||||||||||||
|
|
|
||||||||||||||
|
|
|
(пермолоит) |
Поэтому используют |
искусственный прием. Преобразуют этот постоянный |
|||||||||||
|
|
|
магнитный поток в переменный, специальной обмоткой переменного тока. Эта |
|||||||||||||
вых |
|
|
|
|||||||||||||
|
|
|
обмотка |
создает |
в |
|
магнитных |
стержнях |
переменные магнитные потоки, |
|||||||
|
|
Ф |
|
|
||||||||||||
|
|
|
которые направлены в противоположные стороны и не наводят ЭДС в |
|||||||||||||
|
|
|
|
|||||||||||||
|
=Ф |
|
|
выходной |
обмотке. |
Но |
эти |
магнитные |
потоки изменяют |
магнитную |
||||||
|
|
|
проницаемость сердечников и их магнитное сопротивление с удвоенной |
|||||||||||||
|
з |
|
|
|||||||||||||
|
|
|
|
|||||||||||||
L |
|
|
|
циклической |
частотой по |
отношению к |
циклической частоте |
питающего |
||||||||
вых |
|
U |
напряжения. |
И |
это |
меняющееся магнитное сопротивление |
сердечников |
|||||||||
|
|
|||||||||||||||
|
|
|
||||||||||||||
приводи к изменению постоянных магнитных потоков Земли в стержнях, которые и наводят ЭДС в выходной обмотке, зависящую от угла курса.
40.Виды гироскопов
1.3-х степенные;
2.2-х степенные;
3.Механические;
4.Вибрационные (ДУС);
5.Оптические.
Новые типы гироскопов
1.Гироскопы с новым типом подвеса ротора.
2.Гироскопы с нетвердотелым носителем момента количества движения.
3.Гироскоп момент количества движения которого связан не с вращением а с колебанием.
4.Гироскоп, использующий геомагнитные свойства элементарных частиц
5.Гироскоп, использующий изменение параметров электромагнитных колебаний, распространяющихся как в замкнутых, так и разомкнутых контурах.
6.Струйно-поляризационные гироскопы.
Кновым видам гироскопов относятся: гироскоп с электрическим подвесом ротора; Гироскоп с магнитным подвесом ротора; Криогенный гироскоп; лазерный гироскоп.
40.Виды гироскопов
Гироскоп с электрическим подвесом ротора
1952 год EGS
4
d
|
|
1 |
|
|
s E |
2 |
|
|
|
|
|
8 |
|
|
E |
||||
7 |
|
f |
|
8 |
|
d |
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
6 |
f |
|
E |
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
S |
8 |
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
2 |
При создании таких Гироскопов приходится решать: |
||||||
|
|
1. |
|
Для обеспечения большей жесткости подвеса необходимо высокое |
|||||
|
|
|
напряжение на поддерживающих электродах, но при напряженности 3 кВ на 1 мм |
||||||
|
|
5 |
может возникнуть пробой, поэтому необходимо обеспечивать вакуум в зазоре |
||||||
|
|
9 |
электрода и ротора. |
|
|
||||
|
10 |
|
|
2. |
|
Для исключения стекания электрических зарядов с |
|||
|
|
поверхности ротора и поддержания электродов, обработку их |
|||||||
|
|
3 |
|||||||
|
|
необходимо обеспечивать с высокой точностью и хорошим качеством |
|||||||
|
|
|
|||||||
|
|
|
поверхности. |
|
|
||||
|
|
|
3. |
|
|
Поскольку поддерживающие силы малы, то ротор изготавливают |
|||
|
|
|
полым из наиболее легких материалов (алюминий или бериллий). |
||||||
4.Поддержание идеальной геометрической формы ротора, вращающегося с большой угловой скоростью и имеющую тонкостенную оболочку достаточно затруднительно.
5.Трудность съема выходной информации.
6.Корпус гироскопа должен быть вакуум плотным, а все
детали должны быть малогазящими.
система
создания вакуума Источник
питания