

mathematics_part_1_hamov
.pdfплоскости X 0Y вектор ak |
a12 |
k ; |
k , а множество всех решений |
|
|||
a11 |
|
|
|
системы есть множество векторов параллельных (коллинеарных) между собой. Поэтому, если выбрать один ненулевой век-
тор (например, a a12 ; 1 ), то любой другой вектор, координаты
1 a11
которого |
являются |
решением данной системы, |
имеет |
вид |
ak = a1 k |
( k — любое |
действительное число). Если |
a11 = 0, |
то |
a12 ≠ 0 (в противном случае система имеет нулевые коэффициенты). В этом случае y=0, x — свободная переменная и любая пара чисел (x,0), x — действительное число является решением системы. Таким образом, однородная система имеет ненулевые решения в том и только в том случае, когда ее определитель равен нулю.
Пример 5.1. Решить систему:
|
|
x + 2 y = 0 |
|
|
|
|
|
|
|
|
|
|
− 2x − 4 y = 0. |
|
|
||
Преобразуем матрицу системы методом Гаусса |
|||||
|
1 |
2 |
1 |
2 |
|
|
|
|
~ |
|
. |
|
− 2 |
|
|
0 |
|
|
− 4 |
0 |
|
||
|
Система равносильна одному уравнению |
x + 2 y = 0 x = −2 y, |
|||
y |
— любое действительное число. Решениями системы являют- |
||||
ся |
пары (− 2k ; k ) |
или множество коллинеарных векторов |
|||
{− 2k, k}= k{− 2; 1}. |
|
|
|
||
|
|
Задания для самостоятельной работы |
|||
|
1) |
x + y = 0 |
Ответ: k{−1; 1}. 2) |
2x − y = 0 |
Ответ: k{1; 2}. |
|
|
3x +3y = 0. |
|
− 4x + 2 y = 0. |
|
|
3) |
3x − 2 y = 0 |
Ответ: k{2; 3}. 4) |
x +3y = 0 |
Ответ: k{−3; 1}. |
|
|
9x −6 y = 0. |
|
4x +12 y = 0. |
|
|
5) |
− x + 2 y = 0 |
Ответ: k{2; 1}. |
|
|
|
|
3x −6 y = 0. |
|
|
|
101

§ 2. Изменение координат вектора при изменении системы координат (поворот системы вокруг центра)
y
y′ |
|
|
|
|
|
x′ |
||||
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
j |
|
|
|
|
|
||
|
|
′ |
|
|
|
′ |
|
|||
|
j |
i |
|
|||||||
0 |
|
|
|
|
|
x |
||||
|
|
i |
||||||||
Рис. 5.1
Даны две прямоугольные системы координат (x 0 y) и (x′0 y′)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
′ |
|
|
|
|
|
|
|
|
|
|||
рис. 5.1; i , j |
|
j |
— единичные векторы на осях координат. |
||||||||||||||||||||||||||
и i , |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
′ |
в системе (x 0 y): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Находим координаты векторов i , j |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
i |
′ = t11i +t21 j |
. |
|
|
|
|
|
|
|
(5.1) |
|||||||||||||||||
|
|
|
|
|
|
|
+t22 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
j |
′ = t12i |
j |
|
|
|
|
|
|
|
|
|
||||||||||||||
Матрица |
|
|
|
|
|
|
t |
|
|
|
|
t |
|
|
в которой первый столбец есть коор- |
||||||||||||||
|
|
|
|
|
|
|
11 |
|
|
12 |
|
, |
|||||||||||||||||
T = |
|
|
|
|
|
t22 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t21 |
|
|
|
|
|
|
|
|
||||||
динаты вектора i ′, второй столбец – координаты вектора j′, называется матрицей перехода от системы координат (x 0 y) к системе (x′0 y′). Возьмем на плоскости произвольный вектор x , найдем его координаты (проекции на оси) в первой и во второй системах:
|
|
|
|
x = xi + y j = x i |
+ y |
j |
|
|
|
|
|
(5.2) |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
′ |
′ |
|
′ |
|
. Под- |
|||||
и определим зависимость между координатами x , y и x , y |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ ′ |
|
ставляя формулы (5.1) в (5.2), получаем |
|
|
||||||||||||||||||||||
|
|
+ y |
|
= x′(t11i |
+t21 |
|
)+ y′(t12i |
| +t22 |
|
)= |
|
|
||||||||||||
xi |
j |
j |
j |
|
|
|||||||||||||||||||
|
|
= (t11 x′+t12 y′)i |
+ (t21 x′+t22 y′) |
|
. |
|
|
|||||||||||||||||
|
|
j |
|
|
||||||||||||||||||||
Отсюда получаем равенства: |
|
|
||||||||||||||||||||||
|
|
|
|
x = t11 x′+t12 y′ |
|
|
|
|
|
|
|
|
(5.3) |
|
||||||||||
|
|
|
|
|
|
|
′ |
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
y = t21 x |
+t22 y . |
|
|
|
|
|
|
|
|
|
|
|||||||||
Записываем формулы (5.3) в матричном виде:
102
x |
|
t |
|
|
t |
x′ |
|
|
|
||
|
|
|
|
11 |
|
12 |
|
|
|
|
|
|
|
= |
|
|
|
t |
|
. |
|
|
|
y |
t21 |
22 y′ |
|
|
|
||||||
Обозначив матрицы |
x |
, |
x′ |
, |
|||||||
X = |
X ′ = |
||||||||||
|
|
|
|
|
|
|
|
y |
|
y′ |
|
X |
′ |
= T |
−1 |
X , |
|
|
′ |
|
|
|
|
|
|
|
|
X = TX . |
|
|
|
||||
(5.4)
получаем
(5.5)
Таким образом, формулы (5.3), (5.4), (5.5) устанавливают зависимость между координатами одного и того же вектора x в двух различных системах координат (x 0 y) и (x′0 y′).
Пример 5.2. Новая система координат определена ортого-
нальными единичными векторами |
i |
′ |
= |
1 |
2 |
j, |
j |
′ |
= |
2 |
1 |
j. |
|
5 i + |
5 |
|
5 i − |
5 |
Найти координаты вектора x {2; −3} в новой системе координат. Решение. Составляем матрицу перехода от системы коор-
динат, определяемой векторами i , j к системе, определяемой векторами i ′, j′.
|
1 |
|
2 |
|
|
|
|
1 |
|
2 |
|
|
|
5 |
|
5 |
|
|
2 |
|
5 |
|
5 |
x′ |
|
T = |
|
. По формуле (5.4) имеем |
|
= |
|
|
. |
|||||
|
2 |
− |
1 |
|
|
−3 |
|
2 |
− |
1 |
y′ |
|
|
5 |
5 |
|
|
|
|
5 |
5 |
|
|
||
|
|
|
|
|
|
|
|
|
||||
Полученное матричное уравнение решаем одним из следующих двух способов:
1) Перемножаем матрицы, стоящие в правой части, а затем приравниваем соответствующие элементы матриц левой и правой частей. Получаем систему
|
|
|
|
|
|
|
|
−4 |
5 = − 4 |
|
|
|
′ |
+2 y |
′ |
= 2 5 |
x′ = |
|
|||||
|
5 |
|
5 |
|
|||||||
x |
|
|
|
. |
|||||||
|
|
|
′ |
|
′ |
|
<=> |
|
|
|
|
|
|
|
− y |
= −3 5 |
|
7 5 |
|
7 |
|
||
2x |
|
|
= |
|
|||||||
|
|
|
|
|
|
|
y′ = |
5 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
||
2) Для матрицы T находим обратную матрицу T −1 , а далее находим X ′ по первой формуле (5.5):
103
|
|
1 |
1 |
2 |
|
|
5 |
|
|
|
|
|
|
|
|
−1 |
|
|
1 |
|
|
−1 − 2 |
|||
T |
= |
|
|
|
= − |
= − |
|
5; |
|
T |
= − |
|
|
|
|
|
|||||||||
5 |
2 |
−1 |
5 |
|
|
|
5 |
|
− |
2 1 |
; |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
X |
|
x′ |
= T |
−1 |
X |
= − |
1 |
|
|
−1 |
− 2 2 |
|
= − |
1 |
|
4 |
, |
||||||||
′ = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
5 |
|
− 2 1 |
|
|
|
|
|
|
|
5 |
|
|
|
|||
|
|
y′ |
|
|
|
|
|
|
|
−3 |
|
|
|
|
−7 |
|
|||||||||
то есть |
x |
′ |
= − |
4 |
y |
′ |
= |
7 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
5 , |
|
|
5 . |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
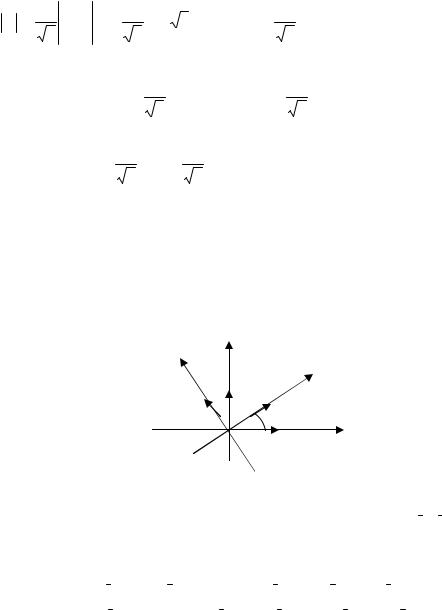
Пример 5.3. Найти зависимость между координатами вектора в системах координат, если вторая система получена из первоначальной поворотом плоскости вокруг центра системы на угол α .
|
|
y |
|
|
|
|
|
||
y′ |
|
|
|
|
x′ |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
i′ |
|
||
|
|
′ |
α |
|
|||||
|
j |
|
|||||||
0 |
|
|
|
|
x |
||||
|
|
i |
|||||||
Рис. 5.2
Решение. Находим координаты векторов i ′, j′ в системе координат (xOy) (рис. 5.2)
i ′ = cosαi + cos (900 −α)j = cosαi +sin α j
j′ = cos (900 +α)i + cosα j = −sinαi + cosα j .
Матрица перехода от системы (x 0 y) к (x′0 y′) имеет вид:
cosα −sinα |
|
T = |
. |
|
|
sinα |
cosα |
Зависимость между координатами вектора x в первой и второй системах координат находится по формулам (5.5)
x |
cosα −sinα x′ |
<=> |
x = x′cosα − y′sinα |
|||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
y |
sinα |
cosα y′ |
|
y = x′sinα + y′cosα. |
||
104
Пример 5.4. Преобразовать уравнение гиперболы x y =1 , используя формулы, полученные в предыдущем примере для случая, когда поворот плоскости осуществлен на угол α = 450.
Решение. При повороте на угол α = 450 матрица перехода от одной системы координат к другой имеет вид
|
2 |
− |
2 |
|
|
2 |
2 |
|
|
T = |
|
. |
||
|
2 |
|
2 |
|
|
|
|
||
|
2 |
|
2 |
|
Формулы преобразования координат точки (x; y) в (x′; y′):
|
2 |
(x′− y′) |
x = |
||
|
2 |
|
|
2 |
|
|
(x′+ y′). |
|
y = |
2 |
|
|
|
Подставляя в уравнение x y =1 получим уравнение той же
гиперболы в системе координат x′0 y′: |
x′2 |
y′2 |
||
|
− |
|
=1. |
|
2 |
2 |
|||
Задания для самостоятельной работы
1. Новая система координат определена ортогональными
единичными векторами |
i |
′ |
1 |
3 |
j , |
j |
′ |
= |
3 |
1 |
j. |
Найти ко- |
||||
|
= 10 i + |
10 |
|
10 i − |
10 |
|||||||||||
ординаты вектора x{− 2; −1} в новой системе координат. |
|
|||||||||||||||
Ответ: x |
= − |
5 |
; y |
= − |
|
5 |
|
|
|
|
|
|
|
|
|
|
10 |
|
10 . |
|
|
|
|
|
|
|
|
|
|||||
′ |
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Новая система координат получена из первоначальной поворотом плоскости вокруг центра на угол 300. Найти матрицу переходаикоординаты вектора x{3; − 2} вновойсистеме координат.
105
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
− |
1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
−sin 30 |
0 |
|
|
|
2 |
2 |
|
|
|
|
|
|||||
T = |
|
|
|
|
|
|
|
|
|
, |
|
|
|
|||||||||
cos 30 |
|
|
= |
|
|
|
|
|
||||||||||||||
Ответ: |
|
|
|
0 |
|
cos 30 |
0 |
|
|
1 |
|
3 |
|
|
|
|
|
|||||
sin 30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
x′ = |
3 |
3 |
−1, |
|
|
y′ = − 3 − |
3 |
|
|
|
|
|
|
|
|
|||||||
|
2 |
|
|
2 . |
|
|
|
|
|
|
|
|
||||||||||
3. Новая система |
координат |
|
определена |
ортогональными |
||||||||||||||||||
единичными векторами |
|
|
i |
′ |
= |
1 |
|
|
|
1 |
j , |
j |
′ |
= − |
1 |
1 |
Найти |
|||||
|
|
|
2 i + |
|
2 |
|
2 i + 2 j. |
|||||||||||||||
координаты вектора x{− 2; 3} в новой системе координат. |
|
|||||||||||||||||||||
2 |
|
|
5 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ответ: x′ = 2 ; |
y′ = |
|
2 |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
§ 3. Линейные преобразования |
|
Формулы x2 = a11 x1 + a12 y1 |
(5.6) |
y2 = a21 x1 + a22 y1 |
|
задают линейное преобразование, переводящее точку плоскости с координатами (x1 , y1 ) (или вектор a1 {x1 ; y1 }) в точку с координатами (x2 ; y2 ) (или вектор a2 {x2 ; y2 }). Поэтому говорят, что задается отображение плоскости в себя. Перейдем к матричной записи системы (5.6), обозначая
x |
|
|
x |
|
|
|
a |
|
a |
|
|
|
|
1 |
|
, |
|
2 |
|
, |
11 |
12 |
|
||
X = y |
|
Y = y |
2 |
|
A = a |
21 |
a |
22 |
|
|||
|
1 |
|
|
|
|
|
|
|
|
|||
получая |
|
|
|
|
|
|
|
|
|
|
|
(5.7) |
Y = AX . |
|
|
|
|
|
|
|
|
|
|
|
|
Матрицу A называют матрицей линейного преобразования плоскости, которое определено формулами (5.6) или (5.7). Заметим, что любому линейному преобразованию, заданному формулами (5.6) соответствует единственная матрица A и обратно, любой матрице A соответствует единственное линейное преобразование вида (5.6) или (5.7).
Выясним, как изменяется матрица линейного преобразования, если от системы координат (x 0 y) перейти к новой системе (x′0 y′). . По формулам (5.5) получим:
106
|
|
|
|
|
X = TX , |
|
X |
|
|
x′ |
Y |
|
x′ |
Y = TY , |
(5.8) |
|
|
||||||||||||||
|
|
|
|
|
|
′ |
= |
1 |
, |
′ |
= |
, |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
2 |
|
|
′ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y1′ |
|
|
|
y2′ |
|
|
|
|
|
|
|
|
|
|
|
|
′ |
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
′ |
), |
|
′ |
′ |
|
|
(x1 ; |
y1 ) — координаты точки (x1 ; y1 ) |
в системе (x |
0 y |
а (x2 |
; y2 ) — |
||||||||||||||||||||||||||
координаты точки |
|
|
(x2 ; y2 ) |
в системе |
(x′0 y′). Подставим форму- |
||||||||||||||||||||||||||
лы(5.8) в (5.7): |
|
TY |
′ |
= |
|
|
′ |
Отсюда, умножая обе части равенства |
|||||||||||||||||||||||
|
|
ATX . |
|||||||||||||||||||||||||||||
на |
T −1 слева, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
Y |
′ |
= T |
−1 |
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
|
(5.9) |
|
|
|||||
|
|
|
|
|
|
|
|
|
ATX . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
Из равенства (5.9) видим, что матрица линейного преобра- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
зования (5.6) или (5.7) (обозначим ее A ) в новой системе коор- |
|||||||||||||||||||||||||||||||
|
|
|
|
′ |
′ |
|
принимает вид: |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
динат (x |
0 y ) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
′ |
= T |
−1 |
AT. |
|
|
|
|
|
|
|
|
|
|
(5.10) |
|
|
|||||||||
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
Матрицы A и |
|
′ |
называются подобными. |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
A |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
Пример |
|
5.5. |
|
Найти |
матрицу |
линейного |
преобразования |
||||||||||||||||||||
x |
|
= x + y |
заданного в системе координат (x 0 y) , в новой систе- |
||||||||||||||||||||||||||||
|
|
2 |
1 |
1 |
|||||||||||||||||||||||||||
y2 = 2x1 − y1 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ме |
(x′0 y′), |
|
|
|
|
|
определяемой |
|
единичными |
|
|
векторами |
|||||||||||||||||||
i |
′ |
= |
1 |
2 |
j ; j |
′ |
= |
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
5 i + |
5 |
|
5 i − |
5 j . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
Решение. |
|
|
|
Матрица |
линейного |
преобразования |
|
1 |
1 |
||||||||||||||||||
|
|
|
|
|
|
|
A = |
, |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
−1 |
матрица перехода от системы (x 0 y) |
к (x′0 y′) : T = 1 |
1 |
2 |
Тогда |
|||||||||||||||||||||||||||
|
. |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
−1 |
|
|
||
матрица линейного преобразования в новой системе координат по формуле (5.10) имеет вид:
A′ = T −1 AT = − 1 |
|
−1 − 2 1 1 |
|
1 |
1 2 |
|
= −1 |
−5 |
1 1 2 |
|
= −1 |
−3 |
−11 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||
5 |
|
− 2 1 |
|
2 |
|
|
5 |
|
2 |
|
|
5 |
|
0 |
|
2 |
−1 |
|
5 |
|
−6 |
3 |
|
|
|
−1 |
|
|
−1 |
|
−3 |
|
|
|
|||||||||||||
Задания для самостоятельной работы |
|
|
|
1. Найти матрицу линейного преобразования x2 |
= −2x1 |
− |
y1 , |
y2 |
= x1 |
+ |
3y1 |
заданного в системе координат (x 0 y), в системе (x′0 y′) , опреде-
ляемой |
|
единичными |
|
перпендикулярными |
векторами: |
|||||||
i |
′ |
= |
1 |
+ |
3 |
j ; j |
′ |
= |
3 |
1 |
j . |
|
|
10 i |
10 |
|
10 i − |
10 |
|
||||||
107
|
|
|
|
5 |
|
− |
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Ответ: |
|
|
2 |
|
2 |
|
|||||
A′ = |
|
|
|
|
|
|
|||||
|
− |
|
5 |
− |
|
3 |
. |
||||
|
|
|
|
||||||||
|
|
2 |
2 |
||||||||
|
|
|
|
|
|
||||||
2. |
Найти матрицу линейного преобразования |
x2 |
= x1 −3y1 , |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
= 2x1 − y1 |
заданного |
в |
системе |
|
|
координат |
(x 0 y ), в системе |
координат |
|||||||||
(x′0 y′), |
определяемой перпендикулярными единичными векто- |
|||||||||||||||
рами: |
i |
′ |
= |
2 |
3 |
|
|
|
|
j |
′ |
3 |
2 |
j . |
|
|
|
13 i + 13 j ; |
|
|
|
= 13 i − |
13 |
|
|
||||||||
Ответ: |
A′ = − |
1 |
11 − 42 |
|
|
|
|
|||||||||
|
|
|
|
|
. |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23 −11 |
|
|
|
|
|||||||
3. |
Найти матрицу линейного преобразования |
x2 = 3x1 + 2 y1 , |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 = 2x1 +3y1 |
|
заданного |
в |
системе |
|
|
координат |
(x 0 y ), в системе |
координат |
|||||||||
(x′0 y′), |
определяемой перпендикулярными единичными векто- |
|||||||||||||||
рами: |
i |
′ |
= |
1 |
1 |
|
|
j |
′ |
|
|
1 |
1 |
|
|
|
|
2 i + 2 j ; |
|
|
= − 2 i + |
2 j . |
|
|
|
||||||||
Ответ: |
5 |
0 |
|
|
|
|
|
|
|
|
||||||
A′ = |
|
. |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|||
§ 4. Собственные числа, собственные векторы квадратной матрицы. Условия, при которых матрица подобна диагональной
Определение 5.1. Ненулевой вектор — столбец |
|
x |
на- |
|||||
|
X = |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
зывают собственным вектором матрицы |
A = |
α |
α |
|
, если су- |
|||
|
11 |
12 |
|
|||||
|
|
|
|
|
|
|
||
|
|
|
α21 |
α22 |
|
|
|
|
ществует действительное число λ, такое, что AX = λX , |
при этом |
|||||||
число λ называют собственным значением (или собственным числом) матрицы A.
Пример 5.6. Для матрицы |
3 |
2 |
векторы |
X1 |
1 |
, |
X 2 |
|
−1 |
|||
A = |
|
|
|
= |
|
= |
|
|||||
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|||
являются собственными векторами с собственными значениями соответственно λ1 = 5, λ2 =1, так как
108

AX |
|
|
3 2 1 |
|
5 |
|
= 5 |
1 |
= 5 X |
|
, AX |
|
|
3 2 |
−1 |
|
−1 |
|
−1 |
=1 X |
|
. |
||
1 |
= |
|
|
= |
|
|
1 |
2 |
= |
|
|
= |
|
=1 |
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2 3 1 |
|
5 |
|
|
1 |
|
|
|
|
|
2 3 |
1 |
|
1 |
|
1 |
|
|
|
||
Теорема |
5.1. Число λ является собственным значением |
||||||||
матрицы |
α |
11 |
α |
12 |
|
тогда и только тогда, когда выполняется |
|||
A = |
|
|
|
||||||
|
|
|
|
|
|
|
|
||
|
|
α21 |
α22 |
|
|
|
|
||
равенство |
|
|
|
|
|
|
|
|
|
|
(α11 −λ) |
α12 |
|
|
|
= 0. |
(5.11) |
||
|
|
|
|
||||||
|
α21 |
|
|
(α22 −λ) |
|||||
Действительно, по определению число λ |
— собственное |
||||||||
значение матрицы A, |
если существует такой ненулевой вектор |
||||||||
X= x , что
y
AX = λX <=> AX −λX = 0 <=> AX −λEX = 0,
где |
1 |
0 |
единичная матрица. Отсюда следует, что λ |
— соб- |
|
E = |
|
|
|||
|
|
0 |
|
|
|
|
|
1 |
|
|
|
ственное значение тогда и только тогда, когда существует ненулевой вектор X , являющийся решением матричного уравнения
(A −λE)X = 0. |
(5.12) |
Матричное уравнение (5.12) равносильно однородной системе линейных уравнений:
(α11 −λ)x + α12 y = 0 |
(5.13) |
α21 x + (α22 −λ)y = 0. |
Система (5.13) имеет ненулевые решения тогда и только тогда, когда ее определитель равен нулю:
(α11 −λ) |
α12 |
|
= 0. |
|
|||
α21 |
(α22 −λ) |
|
Теорема доказана.
109

Определение 5.2. Уравнение (5.11) называют характеристическим уравнением матрицы A.
Из доказанной теоремы следует, что собственные числа матрицы A являются корнями характеристического уравнения (5.11). Для нахождения собственных чисел надо раскрыть определитель стоящий в левой части равенства (5.11), получим квадратное уравнение относительно λ , его корни — собственные числа A.
Для нахождения собственных векторов составляем однородную систему (5.13) для каждого из двух (или одного, если корни характеристического уравнения равны) собственных чисел. Ее решения – собственные векторы. Каждому собственному числу будет соответствовать бесконечное множество собственных векторов, но все они между собой имеют пропорциональные координаты. Матрица размера 2 ×2 может иметь не более двух собственных векторов с непропорциональными координатами. Если матрица A имеет два собственных вектора с непропорциональными координатами:
x1 |
|
x2 |
|
|
x |
|
y |
|
||
|
|
|
|
, |
|
|
≠ |
|
|
, |
x |
|
y |
|
|||||||
X1 = y |
|
, X 2 = y |
|
1 |
1 |
|||||
1 |
2 |
|
|
|
2 |
|
|
2 |
|
|
соответствующих собственным значениям λ1 , λ2 , то матрица A
|
λ |
0 |
|
1 |
|
|
0 |
|
будет подобна диагональной матрице |
λ2 и выполняется ра- |
венство:
T |
−1 |
λ |
0 |
|
, |
где |
x |
x |
|
|
, |
(5.14) |
|||
AT = |
0 |
λ |
|
|
T = y |
y |
|
|
|||||||
|
|
1 |
|
|
|
|
|
|
1 |
2 |
|
|
|
||
|
|
|
|
|
2 |
|
|
|
|
1 |
|
2 |
|
|
|
причем столбцы матрицы T есть собственные векторы, соответ-
ствующие собственным значениям λ1 , λ2 : AX1 |
= λ1 X1 ; |
AX 2 = λ2 X 2 . |
||
Среди матриц выделяются матрицы, которые называются |
||||
a |
a |
|
|
|
симметрическими: A = |
12 |
— симметрическая, если a12 = a21. |
||
11 |
|
|
|
|
a21 |
a22 |
|
|
|
Любая симметрическая матрица имеет два ортогональных |
||||
(перпендикулярных) собственных вектора |
X10 , X 20 |
единичной |
||
длины (орты). Тогда матрица T (см. 5.5) будет матрицей перехода от прямоугольной системы координат (x 0 y), определяемой векторами i , j к прямоугольной системе координат (x′0 y′), опре-
110