

Тест-контроля воздушной обстановки программных продуктов.
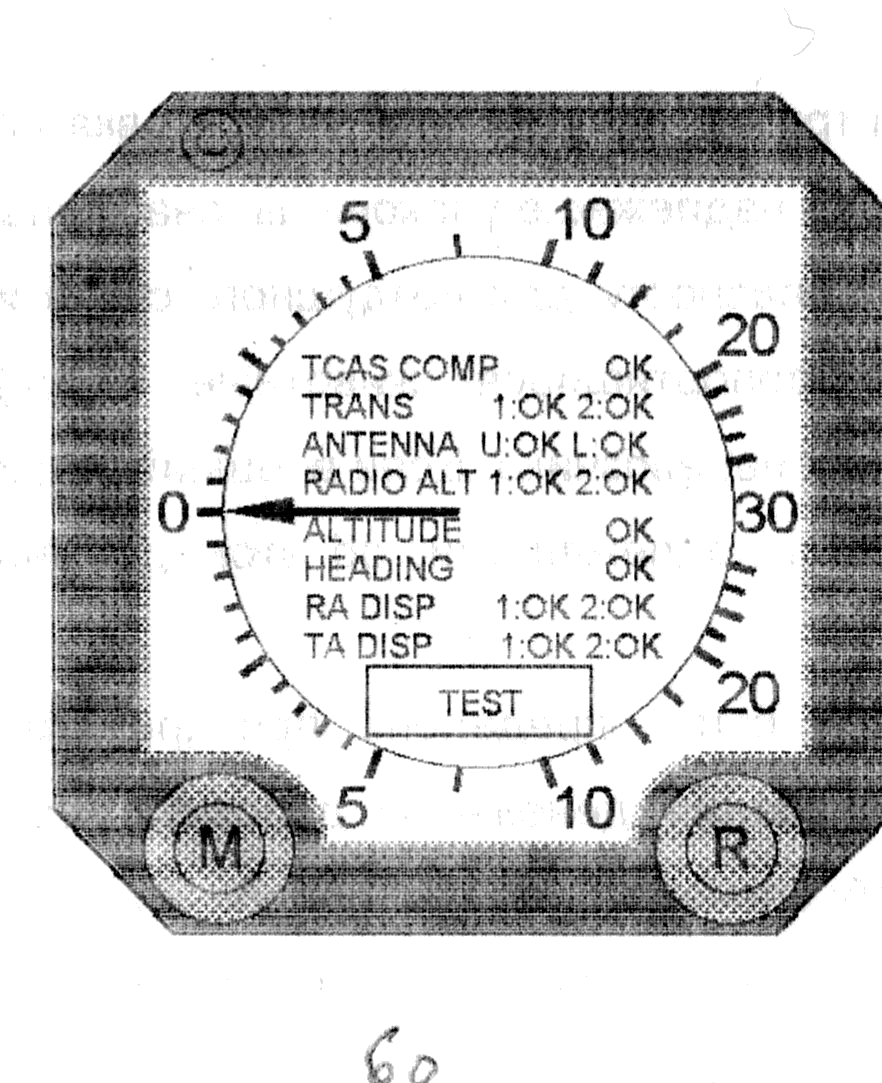
Рис. 75. Результаты тестовой проверки
Кнопкой “R”- изменяется масштаб дальности наVIS(6 м. миль- вперед, 3м.мили назад).
5. Режим XPOR- используется в случае отказа режимов “TA/RA” и “TA” при полетах в регионах, в которых служба ОВД осуществляет контроль в режиме “RBS”.
Назначение остальных органов на ПУ следующее:
3 и 4 – рукоятка набора “TCAS/ATC” и табло отображения, когда ответчика УВД.
– лампа “FAIL” сигнализации отказа ответчики или барометрического высотомера.
6 – кнопка “IDENT” включения сигнала опознавание. Сигнал включается по требованию службы УВД.
7- Переключатель “XPOR” выбора комплекта ответчика
8 – Выключатель “ALT-OFF” датчика барометрической высоты.
Кроме этого для управления процессом отображения используется две кнопки на лицевой панели VIS”
-кнопкой “M” включается или выключается режим отображения воздушной обстановки наVIS:
- кнопкой “R” - изменяется масштаб дальности на VIS (6м.миль - вперед, 3 м.мили - назад, или 12м. миль - вперед, 6м.миль.- назад.)
Глава 5. Бортовые пилотажно-навигационные комплексы
Комплекс взаимосвязанных технических средств, обеспечивающих автоматическое, полуавтоматическое или ручное выполнение всей совокупности пилотажных и навигационных функций с отображением информации о параметрах движения и техническом состоянии средств, получил название бортового пилотажно - навигационного комплекса (БПНК). Он предназначен для выполнения следующих основных функций:
- программирование полета, определение параметров движения и ориентации осей ВС в пространстве, программное управление РТС навигации, посадки и связи, коррекцию счисленных координат, комплексную обработку информации, получаемой от датчиков комплекса;
- управление пилотажными индикаторами и плановыми индикаторами навигационной обстановки;
- формирование и выдачи в САУ для пилотирования и полета по маршруту, а также для выполнения предпосадочного маневрирования, посадки и взлета;
- предполетный и полетный контроль аппаратуры с выдачей сигналов об исправности комплекса и его систем.
Поэтому в состав БПНК должны входить средства запоминания информации, средства измерения навигационных параметров (датчики навигационной информации), устройства отображения навигационной информации и вычислительные средства, в состав которых входит и устройство управления. Обычно оно является составной частью навигационного вычислительного устройства и обеспечивает установленную последовательность функционирования элементов БПНК и задание требуемого закона движения ЛА. Структурная схема БПНК и связи между элементами комплекса, самолетом и экипажем показаны на рис.76.
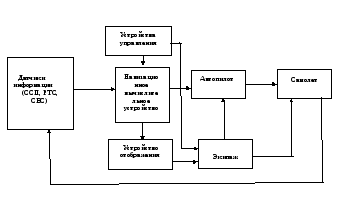
Рис. 76. Структурная схема бортового пилотажно-навигационного комплекса
Так как ни один из известных датчиков навигационной информации не является достаточно универсальным, на борту ВС приходится использовать большой арсенал разнообразных навигационных измерителей (датчиков навигационной информации). Датчики навигационной информации (ДНИ) служат для измерения параметров различных физических полей, на основе которых определяются навигационные элементы полета. Все ДНИ условно можно разделить на две группы:
- датчики 1-ой группы обеспечивают определение навигационных элементов движения. К ним относятся инерциальная навигационная система (ИНС), инерциальная курсовертикаль (ИКВ), система курсовертикали (СКВ), ДИСС, инерциально-доплеровская система (ИДС), информационный комплекс высотно-скоростных параметров (ИК ВСП) или система воздушных сигналов (СВС). Наиболее универсальной в этой группе является ИНС. Это основное навигационное средство в составе БПНК дальних и средних магистральных ВС, состоит, как правило, из 2..3 независимых комплектов. ИНС автономно определяет ускорение по трем измерительным осям, путевую скорость, угол сноса, гироскопический и истинный курсы, углы крена и тангажа. Составляющие путевой скорости используются для определения относительных координат ВС.
При отсутствии в составе БНК ИНС на борту может устанавливаться инерциальная курсовертикаль или курсовертикаль. Они являются основными датчиками гироскопического курса, углов крена и тангажа. Кроме этого, ИКВ обеспечивает определение составляющих скорости ВС путем интегрирования действующих на него ускорений.
Система СКВ формирует ортодромический и гиромагнитный курсы на основе преобразования гироскопического и магнитного курсов, получаемых с выходов гироплатформы ИНС, КВ, ИКД и ИД.
В качестве датчиков курса в ряде БНК могут использоваться курсовые системы (КС или ТКС).
Доплеровские измерители скорости и сноса (ДИСС) непрерывно измеряют путевую скорость и угол сноса и выдают их значения на указатели. Кроме того, измеренные значения доплеровских частот выдаются в навигационный вычислитель для непосредственного счисления пути.
В современных БПНК комплексируют ИНС и ДИСС. Получаемая ИДС не требует длительной предполетной выставки, меньше стоит, более надежна.
Информационный комплекс высотно-скорстных параметров (ИК ВСП) или СВС непрерывно определяет и выдает потребителям истинную воздушную скорость, относительную высоту, число М, температуру наружного воздуха и относительную плотность воздуха. Данные об истинной скорости используются в навигационном вычислителе для расчета направления и скорости ветра, которые необходимы для счисления координат ВС при отказе ИНС и ДИСС и выработке расчетных значений угла сноса и путевой скорости. Данные об относительной высоте необходимы для расчета параметров в режиме коррекции и вертикального маневра.
- датчики второй группы обеспечивают определение навигационных параметров, характеризующих положение ВС относительно опорных линий и навигационных точек или положение объектов относительно ВС. К ним относятся: РСБН, КУРС-МП, СД, РСДН, спутниковая навигационная система (СНС), БРЛС, АРК, астрономическая НС, самолетные ответчики УВД, бортовые системы предупреждения столкновения.
Бортовое оборудование РСБН, обеспечивая непрерывное измерение полярных координат ВС (азимут и наклонная дальность) относительно наземных маяков, используется для коррекции навигационного вычислителя комплекса. Кроме того, возможна азимутальная коррекция гироплатфом ИКВ или КВ и положения ВС относительно осей зон курса и глиссады.
Навигационно-посадочное оборудование КУРС-МП в режиме “Навигация”
позволяет определять магнитный азимут А Ммаяка ВОР относительно ВС и отклонение его от заданного азимута при полете по ЛЗП. В режиме “Посадка” аппаратура формирует сигналы углового отклонения от равносигнальных зон курса и глиссады.
Самолетные дальномеры СД определяют наклонную дальность от ВС до маяков ДМЕ или ВОР/ТАК. Совместное использование КУРС-МП и СД обеспечивает определение полярных координат ВС относительно маяков
ВОР/ ДМЕ или ВОР/ТАК.
В состав БПНК входят центральный и специализированные вычислители (НВ), которые обеспечивают автоматизированное решение навигационных задач. Они могут быть как аналоговые, так и цифровые. Навигационный вычислитель является связующим звеном всех средств комплекса. БПНК, в котором НВ обеспечивает по сигналам ДНИ и заданной программе выдачу исходной информации для пилотирования ВС, называют автоматизированным. БПНК, в котором роль связующего звена выполняют члены экипажа - неавтоматизированным.
К устройствам управления, индикации и сигнализации относятся: пульт ввода и индикации (ПВИ или ПУИ), пульт подготовки и контроля (ППК), пульт взлета и посадки (ПВП), индикатор навигационной обстановки (ИНО или КИНО), индикаторы (указатели) навигационных элементов полета, табло навигационной сигнализации.
С помощью ПВИ обеспечивается управление режимами работы комплекса, ввод и индикация навигационных параметров.
ППК обеспечивает управление режимами подготовки комплекса к работе, автоматический ввод исходных данных программы полета.
С ПВП осуществляется управление взлетом и заходом на посадку.
Индикатор навигационной обстановки обеспечивает индикацию места ВС, навигационных углов, различной аэронавигационной информации на фоне картографической информации по маршруту полета и в районе аэродрома. В составе БПНК ближних магистральных ВС могут использоваться картографические планшеты.
Плановый навигационный прибор (ПНП) позволяет контролировать положение ВС относительно ЛЗП в горизонтальной плоскости и стран света, а также относительно наземных радиомаяков при полете по маршруту и заходе на посадку. При этом реализована индикация - “вид с ВС на землю”.
Табло навигационной сигнализации (ТНС) осуществляет индикацию сигналов о нормальной работе комплекса, указывающих действующий режим работы, автоматического решения различных логических задач (подлет к ППМ, смена ЛЗП, необходимость коррекции счисленного места ВС и т. д.).
Таким образом, по роду измеряемых величин все датчики навигационной информации (ДНИ) можно разделить на средства измерения координат и их первых и вторых производных. Причем данные о производных используются на борту для получения информации о координатах ВС путем интегрировании данных о скорости ВС или двукратным интегрированием данных об ускорении.
Процесс вычисления координат ВС путем интегрирования данных о скорости его движения получил название - счисления пути.
Закономерности счисления пути
Формирование данных о текущих координатах осуществляется путем интегрирования составляющих скорости:
x=x0+![]() ;y=y0
+
;y=y0
+![]() ,
,
где x0иy 0- значение координат в момент начала счисления.
Операции интегрирования данных о скорости выполняются вычислителем БНК. Ввод данных от измерителей скорости в БНК автоматизирован, благодаря чему процесс счисления не требует участия экипажа, проводится практически в течение всего полета и составляет основу процесса определения координат.
Основное достоинство метода состоит в том, что он может быть реализован с помощью сравнительно простых автономных пилотажно-навигационных систем (измерителя воздушной скорости, курсовой системы, гировертикали).
Важнейшей характеристикой процесса счисления является его точность. Оценка точности счисления сводится к определению взаимосвязи между погрешностями измерения составляющих скорости и погрешностями определения координат ВС.
Систематические погрешностиопределения координат связаны с систематическими погрешностями измерения скорости и погрешностями данных о координатах ИПМ интегральными соотношениями:
Δx=Δx0+
![]() ;
Δy = Δy0+
;
Δy = Δy0+![]() .
.
Следовательно, если систематические погрешности измерения скорости постоянны, то вызванные ими погрешности счисления пути будут изменяться по линейным законам:
![]() ;
;![]() .
.
Опыт показывает, что систематические
погрешности измерения скорости постоянны
для данного рейса в пределах воздушной
трассы или определенного ее участка.
Основная причина их появления кроется
в неточном определении постоянной
составляющей скорости ветра. Однако
при переходе от одного рейса к другому
систематические погрешности измерения
скорости и погрешности счисления пути
изменяются случайным образом. Если
обозначить
![]() и
и![]() дисперсии разброса координат ВС в ИПМ,
а символами
дисперсии разброса координат ВС в ИПМ,
а символами![]() и
и![]() дисперсии отклонений систематических
составляющих скорости от своих истинных
значений, то точность полетов по трассе
за большой период времени можно
характеризовать дисперсиями или
средними квадратическими значениями
погрешностей счисления:
дисперсии отклонений систематических
составляющих скорости от своих истинных
значений, то точность полетов по трассе
за большой период времени можно
характеризовать дисперсиями или
средними квадратическими значениями
погрешностей счисления:
![]() ;
;![]() .
.
Таким образом, погрешности счисления пути обусловлены действием погрешностей измерения скорости, имеющими случайный характер. По мере увеличения длительности полета они возрастают и требуют коррекции, т. е. исправления счисленных координат по данным, получаемых от измерителей позиционного типа. Такими измерителями являются радионавигационные системы определения координат ВС.
Методы коррекции счисленных координат
Известны два метода коррекции координат, получившие название коррекции замещением и статистической коррекции.
При коррекции замещениемданные о счисленных координатах заменяются данными о координатах ВС, получаемых от источника информации, который считается более точным. При таком методе коррекции точность скорректированных координат не оценивается. Предполагается, что точность координат ВС после коррекции равна точности корректирующей РНС, которая характеризуется систематической и средним квадратическими значениями случайной погрешности одиночного измерения.
Достоинство метода коррекции замещением - простота. Недостаток его заключается в том, что в процессе коррекции не оцениваются данные о счисленных координатах и о точности счисления. Однако это допустимо лишь при условии, когда точность корректора намного выше точности счисления. Между тем на практике это условие выполняется не в полной мере или не выполняется вообще. Например, может оказаться, что РНС позволяет точно определить одну линию положения, и не позволяет столь же точно определить вторую линию положения. Иногда встречаются ситуации, когда в одной части рабочей области РНС точность измерения достаточно высока, а в другой ее части она заметно ниже и соизмерима с точностью счисления. Соизмеримые значения могут иметь погрешности счисления и погрешности корректирующих средств при малых интервалах коррекции.
В указанных случаях метод коррекции замещением данных не обеспечивает высокой точности коррекции и не позволяет использовать всю имеющуюся навигационную информацию.
Статистическая коррекциялишена упомянутых недостатков и обеспечивает полное и эффективное использование всей навигационной информации. Методы статистической коррекции пригодны при любых соотношениях между точностными свойствами РНС и средств счисления и в общем случае позволяют получать точность более высокую, чем точность РНС и средств счисления, рассматриваемых изолированно друг от друга.
Важным достоинством методов статистической коррекции является то, что при их реализации оценивается точность результатов коррекции, это дает представление об эффективности коррекции и позволяет экипажу выработать правильную стратегию действий. Недостатком методов статистической коррекции является относительная трудность и сложность практической реализации, требующая наличия в составе БНК мощных и быстродействующих цифровых вычислительных устройств.
Сущность методов статистической коррекции заключается в следующем. Предположим, что к моменту времени t известны счислимые координаты ВС
xс и yс и известно, что данные о счисленных координатах искажены случайными погрешностями σ cxи σ cy.
В этот же момент времени измеряются координаты ВС радионавигационной системой. Измеренные координаты равны x и y и имеют свои погрешности σ РНСxи σРНСy. Ставится задача использовать все данные, чтобы оценить наиболее вероятные значения координат ВС и точность их определения.
В теории погрешностей такая задача называется задачей обработки результатов двух неравноточных измерений, погрешности которых случайны и независимы.
В общем виде эта задача сводится к задаче определения координат ВС, наиболее близких к истинным по результатам nнеравноточных измерений, сопровождающихся независимыми случайными погрешностями.
При реализации методов статистической коррекции повышение точности определения координат достигается за счет увеличения числа измерений и их продолжительности. Задача определения продольного и бокового уклонения ВС от ЛЗП с наибольшей точностью и сведение влияния случайных погрешностей до минимума может решаться несколькими методами. Наиболее широкое распространение получили метод наименьших квадратов (МНК), простейший реккурентный метод и метод динамической фильтрации (метод Калмана).
Особенности построения современных БПНК
В составе современных БПНК предусмотрено использование БЦВМ для функционального объединения разнородных датчиков, устройств и систем и автоматизации процессов обработки информации и управления ВС.
Для повышения точности и надежности измерений применяется комплексирование - объединение основанных на различных принципах датчиков навигационной информации в комплексную систему (КНС).
Пример такой КНС с коррекцией счисленных координат представлен на рис.77.

Рис.77. Структурная схема комплексной НС
В качестве системы счисления пути (ССП) используются курсо-доплеровские или инерциальные системы. Для коррекции ССП могут использоваться различные позиционные радионавигационные системы навигации.
Т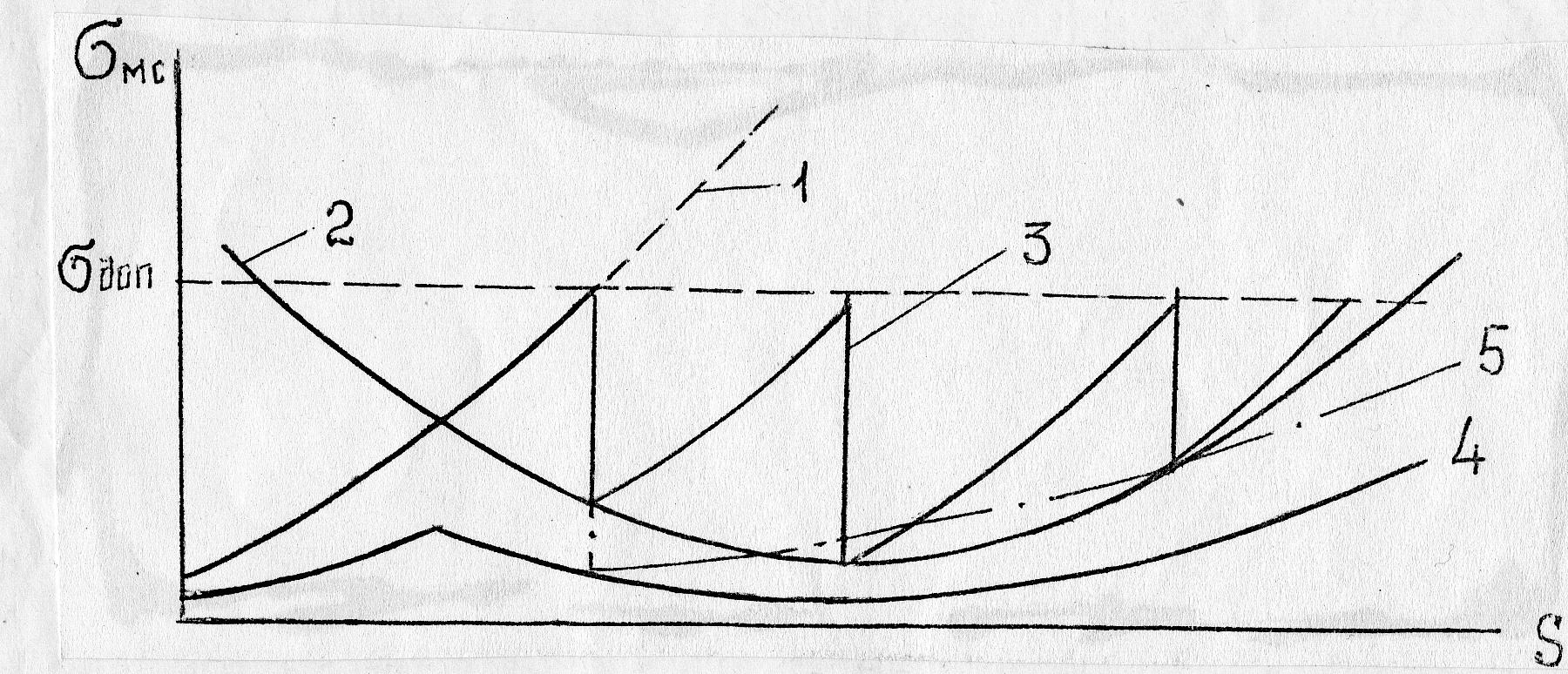 очностные
характеристики КНС зависят от качества
и числа комплексируемых измерителей.
Так комплексирование ИНС иVOR/DMEпозволяет повысить точность определения
места ВС в 2,8…3,5 раза, а при использовании
дальномерной системы и ИНС - в 24 раза.
Применение ДИСС в качестве второго
измерителя КНС при основном измерителе
ИНС повышает точность примерно в 70 раз
по сравнению с ИНС, а комплексирование
ИНС, ДИСС и ФРНС “Омега”— в 125 раз. На
рис.78 представлен зависимости погрешностей
определения места ВС от пройденного
пути при различных способах определения
и разных методах коррекции.
очностные
характеристики КНС зависят от качества
и числа комплексируемых измерителей.
Так комплексирование ИНС иVOR/DMEпозволяет повысить точность определения
места ВС в 2,8…3,5 раза, а при использовании
дальномерной системы и ИНС - в 24 раза.
Применение ДИСС в качестве второго
измерителя КНС при основном измерителе
ИНС повышает точность примерно в 70 раз
по сравнению с ИНС, а комплексирование
ИНС, ДИСС и ФРНС “Омега”— в 125 раз. На
рис.78 представлен зависимости погрешностей
определения места ВС от пройденного
пути при различных способах определения
и разных методах коррекции.

Рис. 78. Зависимость погрешности определения места ВС от пройденного пути
1 - ССП; 2 - РНС; 3 - КНС с коррекцией замещением; 4 - КНС с непрерывной статистической коррекцией; 5 - КНС с дискретной статистической коррекцией.
В таблице 7 приведены основные характеристики типовых БПНК ,применяемые на воздушных судах ГА.
Таблица 7
|
Характеристика |
БНК-2П “Пижма” |
БКС ЦПНО |
|
1 |
2 |
3 |
|
Состав комплекса |
ЦВМ-20-86; БСКВ; А-312-07; СД-75; КУРС - МП-70; СОМ 64; СО-70; МНРЛС “Гроза”; ДИСС-013; АРК-15М; ИНО-2М; РМИ-2Б; ИСА.; А-034. |
ВСУП-85;ВСС-85;СЭИ; БИНС-85; СВС-85; ILS-85; VOR-85; РВ-85; MLS-85; РСБН-85; DME/P-85; АРК-85; МНРЛС-85; СНС-85; КИНО; КПИ; РМИ-3; КИ-13. |
|
Возможность программирования маршрута |
До 50 ПМ и РМ; 8 аэропортов; 8 зон РДС |
70….100 маршрутов |
|
Погрешность (2σ) определения места ВС: |
| |
|
-в режиме счисления пути |
2%S |
3,7 км/ч |
|
- в режиме КОИ |
1%S |
- |
|
- в режиме коррекции по: |
| |
|
2-м маякам РСБН |
- |
2 км |
|
1-му маяку РСБН |
(0,7%D+0,3) км |
До 7км |
|
1 |
2 |
3 |
|
РСДН |
- |
9,8 км |
|
Количество обслуживающего ЛС |
3 |
2 |
|
Масса комплекта, кг |
495 |
650 |
|
СВНО, ч |
300 |
- |
|
Срок службы, лет |
10 |
30 |
Список рекомендуемой литературы
1. Авиационная радионавигация. / Под ред. А. А. Сосновского. М.: Транспотрт,1990.264с.
2. Аникин А.М. Аэронавигация: Методические указания по изучению темы “Применение спутниковых навигационных систем”. СПб, Академия ГА, 1996. 50с.
3. Астафьев Г.П., Олянюк П.В. Радиотехнические средства навигации и посадки. Учебное пособие. М.: Транспорт, 1982. 128с.
4. Бондарчук И.Е. Летная эксплуатация радионавигационного оборудования самолетов. М.: Транспорт, 1987. 272с.
5. Верещака А.И., Олянюк П.В. Авиационное радиооборудование. Учебник для вузов. М.: Транспорт, 1996. 334с.
6. Липин А.В. Комплексная система пилотажно-навигационного оборудования самолета ТУ-204.Часть 1 .Учебное пособие/ ОЛАГА. Л.,1991.60с.
7. Липин А.В., Олянюк П.В. Бортовые системы предотвращения столкновений воздушных судов. СПб.: Академия гражданской авиации, 1999.
8. Хиврич И.Г., Белкин А.М. Автоматизированное вождение воздушных судов. Учебное пособие. М.: Транспорт, 1985.328с.
О г л а в л е н и е