

Управляющие программы для станков с чпу
Информация о порядке обработки изделия на станке вводится по кадрам. КАДР - это часть управляющей программы, вводимая и обрабатываемая как единое целое и содержащая не менее одной команды.
В каждом кадре записывается только та часть программы, которая изменяется по отношению к предыдущему кадру.
Кадр состоит из слов, определяющих назначение следующих за ними данных.
Например:
N3 - порядковый номер кадра
G02 - подготовительная функция
(G01 - перемещение по прямой к точке
G02,G03 - круговая интерполяция по часовой или против)
X - Координаты конеченой точки перемещения по осям, Y - ( например, X+037540 (375,4мм)
Z -
- координаты центра дуги при круговой интерполяции
- K -
F4 - код подачи (например, F0060 (60мм/мин)) S2 - код частоты вращения шпинделя T2 - номер инструмента
M2 - вспомогательная функция (смена инструмента, смена стола, включение охлаждения, зажим заготовки ...).
L3 -ввод и отмена коррекции геометрической информации.
LF - конец кадра.
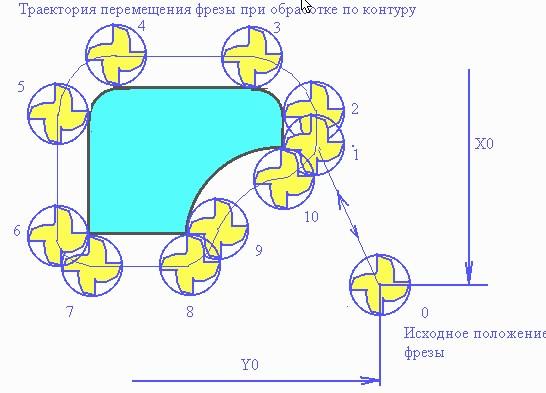
Чтобы составить программу перемещения рабочих органов станка надо связать с ним определенную систему координат. Ось Z выбирается параллельно оси главного шпинделя станка, ось X всегда горизонтальна. При составлении программы пользуются понятием нулевой, исходной и фиксированной точки .

Подготовка управляющей программы включает:
1.Анализ чертежа детали и выбор заготовки.
. Выбор станка по его технологическим возможностям (размеры, возможности интерполяции , количество инструментов и т.д.).
.Разработка технологического процесса изготовления детали, выбор режущего инструмента и режимов резания.
4.Выбор системы координат детали и исходной точки для инструмента.
5.Выбор способа крепления заготовки на станке.
Простановка опорных точек, построение и расчет перемещения инструмента.
Кодирование информации
Запись программы на программоноситель, ее редактирование и отладка.
Применение станков с ЧПУ значительно обострило проблему использования человека в производственных условиях. Выполнение всех
 действий
по изготовлению детали станком в
автоматическом режиме оставило человеку
наиболее тяжелую и не творческую работу
по установке и снятию заготовок.
Поэтому, одновременно с развитием
станочных систем с ЧПУ, велись работы
по созданию систем способных заменить
человека при выполнении специфических
действий, требующих применения "РУЧНОГО"
труда.
действий
по изготовлению детали станком в
автоматическом режиме оставило человеку
наиболее тяжелую и не творческую работу
по установке и снятию заготовок.
Поэтому, одновременно с развитием
станочных систем с ЧПУ, велись работы
по созданию систем способных заменить
человека при выполнении специфических
действий, требующих применения "РУЧНОГО"
труда.
Фрезерный станок и многооперационный станок (обрабатывающий центр) с числовым программным управлением
3.3 Промышленные роботы
Промышленный робот (ПР) это механический манипулятор с программным управлением.
Манипулятор - механическое устройство, имитирующее или заменяющее действия человеческих рук на обьект производства.
Промышленные роботы подразделяются на технологические (изме-
няющие свойства обьекта) и транспортные.
Технологический робот производит сварку, транспортный робот перемещает заготовки в зону обработки.
По грузоподьемности подразделяются на:
 Масса
обьекта сверхлегкие до 1 кг легкие
1 - 10 кг средние 10 -100 кг
тяжелые 100- 1000 кг сверхтяжелые
более 1000 кг
Масса
обьекта сверхлегкие до 1 кг легкие
1 - 10 кг средние 10 -100 кг
тяжелые 100- 1000 кг сверхтяжелые
более 1000 кг
Сверхлегкие роботы собирают прибор, тяжелый робот перемещает крупногабаритные заготовки.
ПР подразделяются также по количеству степеней свободы рабочего органа, по системе ЧПУ (замкнутая и незамкнутая, контурная и позиционная, CNC, DNC, HNC).
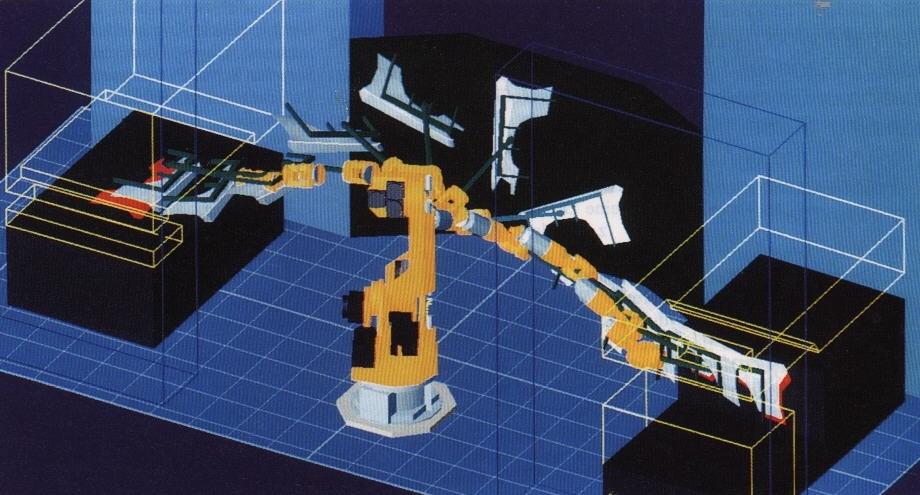
Зона обслуживания транспортного робота и траектория перемещения заготовки
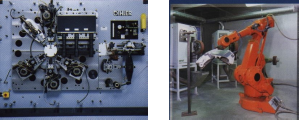
В настоящее время широкое распространение получили транспортные роботы, осуществляющие загрузку технологического оборудование, доставку заготовок со склада и транспортировку деталей на склад. При производстве штамповочных операций транспортные роботы осуществляют подачу заготовок на штамп и снятие их.
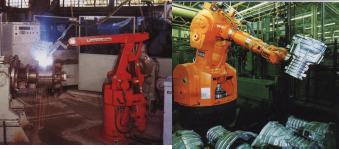
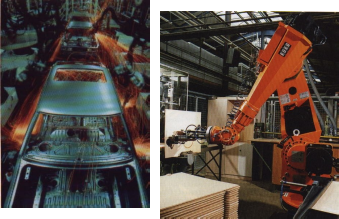
Широкое применение получили роботы производящие сварку кузовов автомобилей, их окраску. Роботы применяются при сборке радиоэлектронной аппаратуры, часов и др. приборов.
В совокупности с технологическим оборудованием с системами ЧПУ промышленные роботы образуют базу для комплексной автоматизации производства.
Роботы сваривают кузова легковых автомобилей и устанавливают деревянные панели на станок для обработки (примеры применения роботов)
Контрольные вопросы:
1.Какие системы ЧПУ позволяют обрабатывать сферические поверхности на токарных станках?
2.Какие системы ЧПУ целесообразно применять на сверлильных станках?
3.По скольки координатам возможна интерполяция при обработке заготовок на токарных станках? - на фрезерных станках?
4.Чем отличаются системы циклового программного управления от систем ЧПУ?
5.Какие функции выполняют промышленные роботы?
Образец вопросов карты тестового контроля.
На каких операциях целесообразно применение систем ЧПУ с контурным управлением?
А). При точении ступенчатых валиков.
Б) . При фрезеровании поверхностей двойной кривизны.
В). При обработке отверстий в печатных платах.
Какие виды роботов применяются при окраске сложнопрофильных деталей? А). Технологические с контурным управлением.
Б). Крупногабаритные с позиционным управлением.
В). Транспортные с контурным управлением.