

ves_kurs / theory
.pdfЛЕКЦИЯ 15. МЕХАНИЗМЫ ПОДЪЕМА КРАНА
15.1 Схемы механизмов подъема крана
Механизм подъёма предназначен для подъема и опускания груза на необходимую высоту и удержания груза на требуемой высоте.
Механизм подъёма включает в себя (рис.15.1): двигатель, передаточный механизм (редуктор или редуктор и открытую передачу), тормоз, грузовой барабан, блоки, тяговой орган (чаще всего стальной канат) и грузозахватное устройство (крюк, грузовая подвеска, грейфер и т.п.).
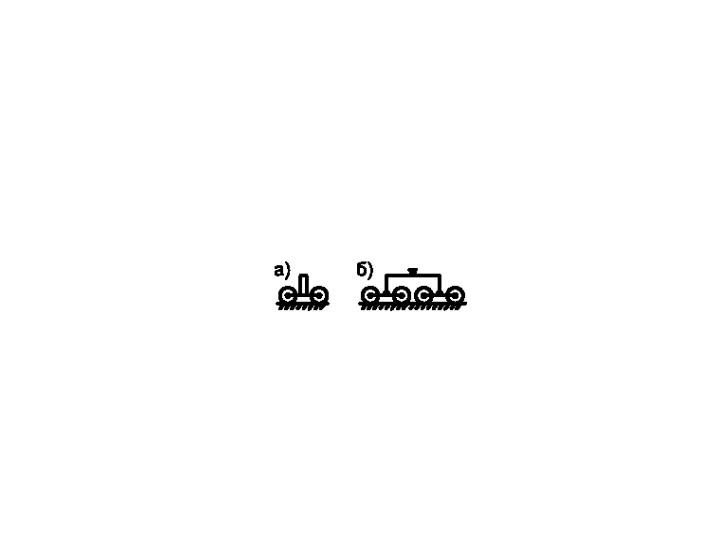
Входящие в состав кранов механизмы подъёма грузов (грузовые лебедки) подразделяются на грейферные и крюковые. Конструктивное исполнение крюковых лебедок может быть самым различным в зависимости от количества барабанов и передаточных устройств.
Рис.15.1-Схемы одномоторных крюковых лебедок а), б) – однобарабанные лебёдки; в) – двухбарабанная лебёдка;
1 – электродвигатель; 2 – тормоз; 3 – редуктор; 4 – барабан; 5 - открытая передача.
Грейферные лебёдки (рис.15.2)всегда двухбарабанные Эти лебёдки различают одномоторные и двухмоторные. Они позволяют получить различные сочетания вращения барабанов, что необходимо для обеспечения работы грейфера. В грейферных лебёдках кранов один барабан является замыкающим, а второй поддерживающим, аналогично и называются лебёдки – одна замыкающая, а вторая - поддерживающая.
Рис.15.2-Схемы грейферных (двухбарабанных) лебёдок а) – одномоторная; б) – двухмоторная;
1 – барабан; 2 – открытая передача; 3 – соединительная муфта с тормозным шкивом; 4 – редуктор; 5 – двигатель.
15.2 Расчет мощности и выбор электродвигателя
Работа подъемного механизма характеризуется повторно - кратковременным режимом. Каждый цикл можно разбить на три периода: разгон, установившееся движение, торможение.
181

В период разгона мощность двигателя расходуется как преодоление статических сопротивлений, так и на преодоление инерционных (динамических) сопротивлений. Расчет потребной мощности двигателя ведется только по статическим сопротивлениям. Динамические сопротивления учитываются только при проверке двигателя на пусковую перегрузку.
Мощность, потребная для преодоления статических сопротивлений, определя-
ется по формуле: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
N |
Q |
H |
g |
n |
, |
|
|
|
|
|
(15.1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
общ |
|
|
|
|
|
|
|
|
|
где: Q |
|
- грузоподъемность крана, т; |
|
|
|
|
|
|
|
|
|
||||||
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
- скорость подъема груза, м/с; |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- КПД механизма подъема. |
|
|
|
|
|
|
|
|
|
|||||
|
общ |
|
|
|
|
|
|
бл |
|
|
|
, |
(15.2) |
||||
|
|
|
|
|
|
n |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
общ |
|
|
пол |
|
|
|
|
бар |
|
ред |
|
|
Для грейферных кранов с двумя независимыми лебедками мощность электродвигателя одной лебедки принимается равной:
N N |
2 |
1 |
0,6N
,
(15.3)
Электродвигатель выбирается по статической мощности по каталогу, с учетом величины относительной продолжительности включения (ПВ%).
15. 3 Расчет передаточного числа и выбор редуктора
Рассчитывается требуемое общее передаточное число привода:
|
|
|
|
i |
|
|
n |
ДВ |
i |
|
i , |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
n |
|
Р |
О |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Б |
|
|
|
где |
i |
O |
- передаточное число открытой передачи; |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
P |
- передаточное число редуктора; |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
ДВ |
- частота вращения вала электродвигателя, об/мин; |
||||||||
|
|
|
|
|
|
|
|
|
|
||
(15.4)
n |
Б |
|
- частота вращения барабана, об/мин , |
|
||||
nБ |
|
60 п |
, |
(15.5) |
|
(Dбар dк ) |
|||||
|
|
||||
|
|
|
|
||
Редуктор выбирается из соответствующего справочника по ближайшему значению требуемого передаточного числа и мощности выбранного электродвигателя.
Определяется тип редуктора, марка, исполнение и др. показатели.
По передаточному числу выбранного редуктора устанавливаются фактическая частота вращения барабана и скорость подъёма груза.
15.3 Выбор тормоза и соединительной муфты
Тормозной момент, по которому выбирается тормоз из каталога, определяется:
182
где |
КТ 1,5 |
2,5 |
|
||
работы механизма; |
|
|
|
а (1или 2) |
|
МТ |
КТ |
QH g(Dбар dк ) общ |
, |
(15.6) |
2 а iО |
|
|||
|
|
|
||
-коэффициент запаса торможения, зависящий от режима
–количество лебедок механизма подъема.
Для механизма подъема выбирается тормоз закрытого типа с электогидротолкаелем, являющийся наиболее надежным в эксплуатации.
Соединительная муфта выбирается по величине диаметра тормозного шкива по рекомендациям справочной литературы (в соответствии с передаваемым крутящим моментом).
ЛЕКЦИЯ 16. МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ И ПОВОРОТА КРАНА
16.1 Механизмы передвижения крана
16.1.1 Классификация
Перемещение грузоподъёмной машины в целом обеспечивается механизмом передвижения. Механизмы передвижения выполняются для перемещения по рельсовому, безрельсовому или канатному пути. По рельсовому пути передвигаются мостовые, козловые, башенные, портальные и ряд других грузоподъёмных машин. Канатный путь имеют тележки кабельных и мостокабельных кранов. Безрельсовый путь используется стреловыми кранами на автомобильном, пневмоколесном, гусеничном ходу.
Передвижение по рельсовому пути осуществляется одним из двух типов ме-
ны
вые
Рис.16.1-Компоновочные схемы ходовых тележек а) – жесткое крепление колес; б) – шарнирное крепление колес.
В портальных кранах в составе одной балансирной тележки может быть несколько приводных колес.

16.1.2 Определение нагрузок на опоры крана В общем виде нагрузка на одну опору крана может быть определена (рис.16.2)
по формуле:
Р |
1 |
|
|
V |
|
G |
НЧ |
||
i |
4 |
|
|
|
|
|
|
|
S2t0
S
2Cos 2Sin
S в
,
(16.1)
|
|
где: G |
НЧ |
– вес неповоротной части крана (портала), приложенный в центре ее |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
тяжести, кН; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
V G |
ПЧ |
G |
ГР |
– вес поворотной части крана и груза, приложенный в точке |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Е, |
(G |
ПЧ |
G |
КР |
G |
НЧ |
) кН; |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
t |
0 |
|
– смещение шарнира крепления стрелы относительно центра портала, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M=V·ℓ – момент, создаваемый силой тяжести поворотной части крана, |
|||||||||||||||
включая груз, кН·м; |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
G |
|
|
– плечо приложения суммарной вертикальной нагрузки, м; |
|
||||||||||
|
|
|
|
|
i |
|
|
i |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
– угол между осью Х и положением стрелы (при S в, 45˚). |
|
|
||||||||||||||
|
|
Следует учитывать, что P P |
min |
при знаке «-» (на опоре Д) и P P |
max |
при |
||||||||||||
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
i |
|
|
знаке «+» (на опоре В), согласно схемы на рис. 16.
Рисунок.16.2-Схема к расчету нагрузок на опоры крана
16. 1.3 Расчет числа колес и их диаметра Количество ходовых колес на одной опоре крана определяется с учетом мак-
симальной нагрузки, приходящейся на опору и допускаемой нагрузки на одно колесо:
|
|
|
|
P |
max |
, |
(16.2) |
|
Z |
' |
|
||||
|
P |
||||||
|
|
|
|
||||
|
|
|
|
|
|
||
где |
Р – допускаемая нагрузка на одно колесо, зависящая от типа рельсов и |
||||||
шпального основания; Р 200 500 КН .
Если в результате расчетов получится дробное значение колес, то оно округляется в большую сторону Z .
Число приводных колес определяется из условия отсутствия буксования их при пуске и движении крана против ветра и вверх по уклону.
Чтобы не допустить буксования необходимо соблюдать условие.
184

|
|
|
|
F |
СЦ |
Р |
W |
|
Р |
, |
||||
|
|
|
|
|
|
КПР |
|
|
ОБ |
|
КПР |
|
||
где F – сила сцепления приводных колёс с рельсом, КН |
|
|||||||||||||
|
СЦ |
– коэффициент сцепления приводных колес с рельсом; |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
– коэффициент трения между колесом и рельсом; |
|
|||||||||||||
Р |
КПР |
– суммарная нагрузка на приводные колеса, кН; |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
W |
|
– общее сопротивление передвижению крана, кН. |
|
|||||||||||
|
ОБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда, введя коэффициент запаса К 1,1 1,2, получим: |
|
|||||||||||||
|
|
|
|
|
|
Р |
|
|
W |
|
|
К , |
|
|
|
|
|
|
|
|
|
|
ОБ |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
КПР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СЦ |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Расчетное количество приводных колес определяется по формуле:
Z |
|
|
Р |
КПР |
, |
|
|
||||
|
|
|
|
|
|
|
ПР |
|
min |
|
|
|
|
|
Р |
|
|
|
|
|
К |
|
|
(16.3)
(16.4)
(16.5)
При расчете ходовых колес определяют их диаметр, устанавливают ширину поверхности дорожки качения.
Диаметр колеса, м:
где
К |
б |
0,1 1,3 |
|
|
|
|
|
К |
|
Р |
экв |
|
|
D |
|
|
б |
К |
|
|
||
|
|
|
|
|
||||
|
К |
|
В q |
, |
|
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
(16.6) |
|
– коэффициент, учитывающий |
влияние динамических |
|||||||
нагрузок и зависящий от скорости движения;
Рэкв
К
– эквивалентная нагрузка на колесо, т.е. скорректированная макси-
мальная нагрузка на
работы Р |
экв |
j |
Р |
max |
|
К |
К |
||||
|
К |
|
коэффициент, учитывающий переменность нагрузки и режимы |
|
, j |
0,95 0,98 ; |
К |
|
В – ширина головки рельса, см;
q 500 600 – допускаемое давление, зависящее от материала колеса,
Н/см.
После расчета диаметра колеса он уточняется по ГОСТ (в большую сторону).
16.1.4 Расчет сопротивлений передвижению и мощности привода При передвижении крановых тележек по рельсовому пути сопротивление пе-
редвижению определяется как сумма сопротивлений:
- от трения в ходовой части |
W |
; |
|
|
|
ТР |
|
- от уклона пути - W |
; |
|
|
У |
|
|
|
-от силы давления ветра - WВ ;
-силы инерции при неравномерности движений - Wи :
185

W |
W |
W |
ОБ |
ТР |
У |
W |
В |
|
W и
,
(16.7)
Сопротивление трения зависит от нагрузки на ходовые колеса, диаметра колес и их цапф, коэффициентов трения:
|
|
|
|
|
|
d |
Ц |
2 f |
W |
G |
|
G |
|
|
|
|
|
КР |
Г |
|
|
|
||||
ТР |
|
|
|
D |
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
К |
К |
Р |
|
,
(16.8)
где G |
|
и G |
Г |
- вес крана и вес груза, кН; |
|
|
|
|
|
|||||
КР |
|
|
|
|
|
|
|
|
|
|
|
|
||
0,01 |
- коэффициент трения в подшипниках качения; |
|
||||||||||||
f |
0,05 - коэффициент трения качения колеса по рельсу; |
|
||||||||||||
D |
, d |
|
- диаметры колеса и его цапфы, см; |
|
|
|
||||||||
|
К |
|
Ц |
|
|
|
|
|
|
|
|
|
|
|
К |
Р |
1,1 1,5 - коэффициент, учитывающий трение в ребордах и ступицах |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
колес. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сопротивление от уклона пути: |
|
Sin G |
|
|
|
i , |
|
|||||||
|
|
|
|
|
W G |
КР |
G |
Г |
КР |
G |
Г |
(16.9) |
||
|
|
|
|
|
У |
|
|
|
|
|
||||
где - угол наклона пути, град; |
|
|
|
|
|
|
||||||||
i
- уклон пути
i
0,001 0,003
,
(16.10)
В суммарное ветровое сопротивление входит сопротивление от воздействия
ветра на конструктивные элементы крана - W |
|
|
и на груз - |
W |
, т.е. |
|||||
|
КР |
|
|
|
|
|
|
Г |
|
|
W |
W |
|
W |
|
; |
|
|
|
|
|
В |
КР |
|
Г |
|
|
|
|
|
||
W |
Р |
В |
F |
К |
СП |
, |
|
(16.11) |
||
В |
|
Hi |
|
|
|
|
|
|||
где
Р |
В |
|
- ветровое давление на единицу расчетной наветренной площади эле-
мента конструкции; |
|
|
|||
К |
СП |
- коэффициент сплошности (для сплошных поверхностей |
|||
|
|
|
|
|
|
механизмов |
К |
СП |
0,8 1, для решетчатых ферм К |
СП |
0,2 0,6 ); |
|
|
|
|
||
К |
СП |
|
1
, для
FHi
- расчетная наветренная площадь.
Расчетную наветренная площадь груза определяют по фактическим данным
или ориентировочно, в зависимости от его массы: |
|
|||||||
Масса груза, т … |
5,0; |
10,0; |
16,0; |
20,0; |
25,0 |
|||
Площадь груза, м² … |
7,1; |
10,0; |
14,0; |
16,0; |
18,0 |
|||
Сопротивление от сил инерции определяются: |
|
|||||||
|
|
|
Wи |
|
mКР mГР пер , |
(16.12) |
||
|
|
|
|
t p |
|
|
||
|
|
|
|
|
|
|
|
|
где mКР и mГР - соответственно масса крана и груза; |
||||||||
|
пер |
- скорость передвижения крана (тележки); м/сек; |
||||||
|
|
|
|
|
|
|
|
|
t p - время разгона механизма до минимальной скорости, которое не должно превышать для кранов 8 – 10 сек, а для тележек 5 – 6 сек.
186

Статическая мощность двигателей, при установившемся движении против ветра и преодолении уклона пути, для кранов, работающих на открытых площадках, определяется, кВт:
|
|
|
|
W |
|
пер , |
(16.13) |
|
N |
|
|
об |
|
||
|
СТ |
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
об |
|
|
где об - общий КПД механизма передвижения (в предварительных расчетах |
|||||||
можно принимать |
0,7 0,85). |
|
|
||||
об |
|
|
|
|
|
|
|
Для кранов, работающих нагрузки при разгоне крана.
N |
СТ |
|
внутри помещений,
|
W |
1,3W |
|
пер , |
||
|
ТР |
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
об |
|
|
||
|
|
|
|
|
|
|
учитываются динамические
(16.14)
где
1,6
- средний коэффициент перегрузки электродвигателей во время
разгона.
Абсолютное большинство портальных кранов имеют индивидуальные независимые приводы, устанавливаемые на каждой опоре портала. В этом случае при выборе электродвигателя суммарную мощность повышают на 25% и от нее принимают
1/4, т.е.
N |
|
1,25N |
СТ |
|
|||
1 4 |
|
4 |
|
|
|
|
,
(16.15)
При установке приводов на двух опорах мощность каждого электродвигателя принимается равной 60% от суммарной мощности.
По рассчитанной таким образом мощности выбирается электродвигатель по каталогу. Статическую мощность необходимо пересчитывать с учетом фактического значения относительной продолжительности включения электродвигателя (ПВ%).
Выбор электродвигателя производится из условия:
где
кВт ;
|
N |
ном |
N |
расч |
, |
(16.16) |
|
|
|
||||
Nном |
- номинальная мощность электродвигателя (каталожное значение), |
|||||
N расч - расчетная мощность на валу электродвигателя, кВт.
|
|
|
|
ПВ |
|
|
N |
|
N |
|
ф |
||
расч |
cт |
ПВ |
э |
|||
|
|
|||||
|
|
|
|
|
||
|
|
|
|
к |
||
,
(16.17)
где ПВф - фактическое (заданное или расчетное) значение относительной про-
должительности включения механизма, %; ПВкэ - каталожное или стандартное значение относительной продолжитель-
ности включения электродвигателя, ближайшего по значению к
ПВф
.
16.1.5 Выбор редуктора Стандартный редуктор выбирается из справочника по передаваемой мощно-
сти, равной мощности приводного электродвигателя, и требуемому общему передаточному числу, которое находится из выражения:
187

где
n |
60 |
пер |
/ D |
к |
|
К |
i |
n |
ДВ |
/ n |
, |
об |
|
к |
|
- частота вращения ходового колеса, об/мин.
(16.18)
Передаточное число открытой передачи
i |
oп |
|
находится как отношение общего
передаточного числа к передаточному числу выбранного стандартного редуктора
i |
|
i |
|
об |
i |
||
оп |
|
|
|
|
|
|
ред |
,
(16.19)
Мощность, передаваемая открытой зубчатой передачей, должна быть не менее мощности редуктора.
16.1.6 Выбор тормоза и соединительной муфты Для выбора тормоза определяется величина тормозного момента:
М |
Т |
|
|
W |
W |
W |
' |
D |
|
|
|
|
||||||
У |
В |
ТР |
К |
об |
|||
|
|||||||
|
|
|
2 i |
|
|
|
|
|
|
|
об |
|
|
||
К |
Т |
|
, Н·м,
(16.20)
К |
Р |
|
Сопротивление трения корректируется на величину коэффициента 1,1 1,5, учитывающего трения реборд колес о рельсы:
W |
' |
W |
/ К |
, |
(16.21) |
ТР |
ТР |
Р |
|
|
|
По величине диаметра тормозного шкива и диаметра выходного вала редуктора выбирается соединительная муфта.
16.2 Механизмы поворота крана
16.2.1 Конструкция стреловых систем Стреловые системы поворотных кранов предназначаются для изменения по-
ложения груза относительно оси вращения крана.
Стреловые системы подразделяются на две группы: стреловые системы с горизонтальным перемещением груза и с негоризонтальным перемещением груза при изменении вылета стрелы.
Стреловые системы с горизонтальным перемещением груза (рис 16.3) при изменении вылета стрелы можно подразделить на две принципиальных конструктивных группы:
Прямые качающиеся стрелы с уравнительными устройствами и шарнирно – сочлененные системы с хоботами.
При изменении вылета прямых качающихся стрел точка подвеса груза (концевые блоки) перемещаются по дуге окружности. Горизонтальность перемещения груза достигается введением в стреловую систему специальных уравнительных устройств: уравнительные полиспасты, уравнительные барабаны и уравнительные блоки.
Изменения высоты подвеса груза у прямых стрел с уравнительными блоками достигается изменением длины подъемного каната между грузовым барабанам и
188

концом стрелы за счет перемещения уравнительного блока 2 при изменении вылета стрелы.
Рисунок 16.3-Стреловая система с прямой стрелой с уравнительным блоком 1 – лебедка; 2 – уравнительный блок; 3 – тяга; 4 – стреловой блок;
5 – стрела; 6 – рейка; 7 – коромысло.
Стреловые системы в виде шарнирно – сочлененной укосины (рис. 16.4) представляют собой шарнирный четырехзвенник, подвижными звеньями которого является стрела, хобот и оттяжка хобота.
Рисунок 16.4-Шарнирно – сочлененная стреловая система с прямым хоботом 1 – лебедка; 2 – рейка; 3 – коромысло; 4 – оттяжка; 5 – хобот;
6 - грузовой канат; 7 – стрела.
Необходимая траектория движения концевых блоков хобота достигается за счет подбора соответствующих размеров звеньев (укосины с прямым хоботом).
Стреловые системы с негоризонтальным перемещением груза применяются в основном в мобильных кранах: автомобильных, пневмоколесных, гусеничных, железнодорожных.
16.2.2. Механизмы изменения вылета стрелы Механизмы изменения вылета (рис.16.5) могут иметь жесткую или гибкую
связь со стреловым устройством.
Полиспастный механизм изменения вылета не обеспечивает жесткой связи стрелы с металлоконструкцией поворотной части, он прост по устройству и в эксплуатации, поэтому применяется в мобильных кранах.
Механизм изменения вылета у портальных и плавучих кранов должен иметь жесткую связь со стрелой, поэтому для портальных и плавучих кранов основными типами является реечный, винтовой, секторно – кривошипный и гидравлический механизмы.
На современных портальных кранах наибольшее распространение получили реечные механизмы изменения вылета (41%), винтовые (33%), реже применяются
189

полиспастные (20%). Винтовые механизмы изменения вылета применяют на судовых кранах, секторные на плавучих кранах грузоподъемностью 5 т, полиспастные – на плавучих кранах большой грузоподъемности и на судовых кранах.
Рисунок 16.5-Типы механизмов изменения вылета стрелы а) реечный механизм; б) винтовой механизм; в) секторный механизм;
г) секторно – кривошипный механизм; д) кривошпно – шатупный механизм; е) гидравлический механизм.
16.2.3. Расчет механизмов изменения вылета стрелы Статическая мощность электродвигателя механизма изменения вылета стрелы
находится по формуле:
где
U |
СР.КВ |
|
N |
|
|
U |
|
|
|
|
|
СР.КВ |
i |
|
||
|
|
|
|
|
||
|
СТ |
|
|
|
|
|
|
|
|
|
, |
(16.21) |
|
|
|
|
|
0 |
||
|
|
|
|
|
|
- среднеквадратичное усилие в соединительном звене (рейке,
винте, штоке гидроцилиндра, полиспасте), кН;
|
0 |
- общий КПД механизма изменения вылета (для предварительных |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
расчетов может быть принят равным 0,8 – 0,9; |
|||||||||||||
|
i |
|
- скорость рейки, хода винта, |
штока гидроцилиндра или стягивания |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
обоймы полиспаста, м/с : |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
, |
(16.22) |
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
i |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
где - рабочий ход рейки, винта, штока, м; |
|||||||||||||
|
|
|
t |
0 |
- время перевода стрелы из одного крайнего положения в другое, с |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
R |
max |
R |
min , |
(16.23) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
0 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
ив |
|
|
|
где Rmax и Rmin - максимальный и минимальный вылет стрелы, м;ив - скорость изменения вылета стрелы, м/с.
Среднее квадратичное усилие в рейке (винте и др.) определяется по формуле:
190