

330 / ЗаданКурсЖурналПолныйМПУСУ / 2СУ_ХарактеристикШин
.pdfРАЗРАБОТКИ КОНТРОЛЬНО ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ
Автоматизированная система для определения статических характеристик пневматических шин
Юрий Прокопенко, Виктор Роженцев, Владимир Мараховский, Александр Шаманин
|
|
В статье представлена построенная на базе промышленного компьютера |
||||
|
|
автоматизированная система, предназначенная для определения статических |
||||
|
|
характеристик пневматических шин с помощью технических средств управляемого |
||||
|
|
ею стенда. |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
ВВЕДЕНИЕ |
ударов и вибраций, плавность хода, |
В процессе производства шины под |
||
|
|
Безопасность движения многих ви |
управляемость и безопасность движе |
вергаются целому ряду лабораторных |
||
|
|
дов наземного транспорта (автомоби |
ния. Поэтому шины постоянно совер |
испытаний, в том числе статическим |
||
|
|
лей, тракторов, комбайнов, дорожно |
шенствуются в направлении примене |
испытаниям, при проведении которых |
||
|
|
строительных машин и др.) и са |
ния современных материалов, увели |
определяются геометрические пара |
||
|
|
молётов в значительной степени опре |
чения прочности корда и улучшения |
метры и весовые характеристики, де |
||
|
|
деляется совершенством и прочностью |
его связи с резиной, что, в свою оче |
формация шины при её обжатии нор |
||
|
|
применяемых в них пневматических |
редь, способствует повышению стой |
мальной силой, реакция шины на воз |
||
|
|
шин, являющихся одним из основных |
кости шин к повреждениям, улучше |
действие крутящего и поворотного мо |
||
|
|
элементов ходовой части. В процессе |
нию их тягово сцепных свойств, сни |
ментов и др., и динамическим испыта |
||
|
|
эксплуатации шины обеспечивают |
жению теплообразования и сопротив |
ниям, целью которых является опреде |
||
|
|
сцепление колёс с дорогой, передачу |
ления шины качению и, как следствие, |
ление деформации шины и изменения |
||
|
|
тяговых и тормозных сил, смягчение |
повышению безопасности эксплуата |
её радиуса при качении колеса по бего |
||
|
|
возникающих при движении толчков, |
ции транспортных средств. |
вому барабану, влияния разогрева ши |
||
|
|
|
|
|
ны на её характеристики и пр. |
|
|
|
|
|
|
||
|
|
|
|
|
На стендах устаревшей конструкции, |
|
|
|
|
|
|
эксплуатируемых и сегодня на некото |
|
|
|
|
|
|
рых шинных заводах России, для созда |
|
|
|
|
|
|
ния радиальной нагрузки на испыты |
|
|
|
|
|
|
ваемую шину используется гидравличе |
|
|
|
|
|
|
ский привод, основным недостатком |
|
|
|
|
|
|
которого является низкая точность под |
|
|
|
|
|
|
держания задаваемой нагрузки и скоро |
|
|
|
|
|
|
сти деформирования шины. Измерение |
|
|
|
|
|
|
геометрических размеров шины на та |
|
|
|
|
|
|
ких стендах производится вручную с |
|
|
|
|
|
|
помощью стандартных средств измере |
|
|
|
|
|
|
ния линейных размеров (линейка, ру |
|
|
|
|
|
|
летка, штангенциркуль и т.п.). |
|
|
|
|
|
|
Современные стенды для создания |
|
|
|
|
|
|
радиальной нагрузки на шину исполь |
|
|
|
|
|
|
зуют силовой гидроцилиндр, управляе |
|
|
|
|
|
|
мый сервоклапаном. Сервогидравли |
|
|
|
|
|
|
ческий следящий привод таких стен |
|
|
|
|
|
|
дов, с одной стороны, обладает высо |
|
28 |
|
|
|
|
кой точностью воспроизведения и под |
|
|
Рис. 1. Внешний вид стенда ИПШ 500 |
|
держания заданного значения нагруз |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
|
СТА 1/2008 |
||
© 2008, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru

Р А З Р А Б О Т К И / К О Н Т Р О Л Ь Н О * И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы
ки на шину, но с другой стороны, его отличают определённая сложность и значительная стоимость, жёсткие тре бования к чистоте рабочей жидкости и необходимость её охлаждения и, как следствие, высокие требования к ква лификации обслуживающего персона ла. Кроме того, стенды с гидравличе ским или сервогидравлическим приво дом имеют значительные габаритные размеры, определяемые наличием си лового гидроцилиндра и насосной станции.
Всё перечисленное предопределило выбор способа нагружения испытывае мой шины в пользу электромеханиче ского привода, обеспечивающего тре буемые технические характеристики стенда и свободного от проблем, свя занных с использованием сервогидрав лического привода.
В настоящей статье рассматриваются устройство и технические возможно сти автоматизированной системы, по строенной на базе промышленного компьютера и предназначенной для определения техническими средствами стенда таких статических характери стик пневматических шин, как геомет рические размеры, зависимость разме ров шины от силы её обжатия и энер гия разрушения шины при её продав ливании специальным наконечником.
Рассматриваемая система была раз работана в ОАО «СКБИМ» (г. Арма вир).
Далее в статье для краткости она на зывается системой управления и изме рения.
ТРЕБОВАНИЯ К СИСТЕМЕ
И ЕЁ ТЕХНИЧЕСКИЕ
ХАРАКТЕРИСТИКИ
Система управления и измерения должна обеспечивать:
●автоматическое перемещение (пози ционирование) шин различных ти поразмеров в зону измерения габа ритных размеров (наружного диа метра шины и ширины профиля), продольной и поперечной деформа ции шины в режиме обжатия и вели чины проникания специального на конечника в шину в режиме продав ливания;
●ввод параметров процесса испыта ния и параметров испытываемой шины;
●управление работой нагружающего устройства стенда;
●задание и отработку защит испыты ваемой шины и самого стенда;
|
|
|
|
Таблица 1 |
|
||
Основные технические характеристики автоматизированной системы для определения |
|
|
|
||||
|
статических характеристик пневматических шин |
|
|
|
|||
|
|
|
|
|
|
||
Допустимый диаметр испытываемых шин |
|
От 300 до 1500 мм |
|
|
|
||
Закон деформирования шины |
|
|
Линейный |
|
|
|
|
Диапазон скоростей деформирования шины |
|
От 0,02 до 2 мм/с |
|
|
|
||
Наибольшая воспроизводимая и измеряемая нагрузка |
|
300 кН |
|
|
|
||
Погрешность измерения нагрузки: |
|
Не более ±1% от измеряемой величины |
|
|
|
||
● в диапазоне от 6 до 300 кН |
|
|
|
|
|
||
● в диапазоне от 0 до 6 кН |
|
|
Не более ±60 Н |
|
|
|
|
Погрешность измерения продольной, поперечной |
|
|
|
|
|
||
деформации и глубины продавливания шины: |
|
Не более ±0,5% от измеряемой величины |
|
|
|
||
● в диапазоне от 1 до 50 мм |
|
|
|
|
|
||
● свыше 50 мм |
|
|
Не более ±0,25 мм |
|
|
|
|
Погрешность поддержания скорости деформирования |
|
Не более ±3% от заданной скорости |
|
|
|
||
шины |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
● автоматизированное определение га |
в координатах «нагрузка – продольная |
|
|
||||
баритных размеров шины при пово |
деформация», «нагрузка – поперечная |
|
|||||
роте её вокруг своей оси на 120°, 90° |
деформация» и «нагрузка – глубина |
|
|||||
или 60°; |
|
|
продавливания»; вывод на экран мони |
|
|||
● измерение продольной и поперечной |
тора протокола испытаний; распечатку |
|
|||||
деформации шины в режиме обжа |
протокола испытаний и диаграмм на |
|
|||||
тия и |
регистрацию зависимостей |
гружения; архивирование результатов |
|
||||
«нагрузка – продольная деформа |
испытаний. |
|
|
|
|||
ция» и «нагрузка – поперечная де |
|
|
|
|
|
||
формация», в том числе при различ |
ОПИСАНИЕ |
|
|
|
|||
ных внутренних давлениях в шине; |
ФУНКЦИОНИРОВАНИЯ |
|
|
|
|||
● определение величины нагрузки в |
СИСТЕМЫ |
|
|
|
|||
процессе продавливания шины в не |
|
Внешний вид применяемого стенда |
|
||||
скольких точках (по выбору) по пе |
ИПШ 500 показан на рис. 1. Стенд ос |
|
|||||
риметру беговой дорожки и регист |
нащён электромеханическим асин |
|
|||||
рацию |
зависимостей |
«нагрузка – |
хронным частотно управляемым сле |
|
|||
глубина продавливания»; |
дящим приводом, посредством которо |
|
|||||
● автоматическое определение энер |
го плавно регулируется угловая ско |
|
|||||
гии разрушения шины; |
|
рость двигателя и, соответственно, ли |
|
||||
● накопление массивов измеритель |
нейная скорость перемещения испы |
|
|||||
ной информации; |
|
тываемой шины, а также имеет ориги |
|
||||
● возможность передачи измеритель |
нальную систему измерения характе |
|
|||||
ной информации в формате, совмес |
ристик шины [1]. |
|
|
|
|||
тимом с форматом Microsoft Excel, |
|
Структурная схема стенда, на кото |
|
||||
для формирования средствами Excel |
рой показаны состав аппаратуры сис |
|
|||||
протоколов испытаний; |
|
темы управления, а также датчики, |
|
||||
● сохранение результатов испытаний и |
преобразователи, исполнительные уст |
|
|||||
возможность просмотра файлов с ре |
ройства и функционально важные эле |
|
|||||
зультатами предыдущих испытаний; |
менты конструкции, приведена |
на |
|
||||
● тестирование системы и проведение |
рис. 2. |
|
|
|
|||
автоматизированной поверки кана |
|
Перед испытанием шины Ш преоб |
|
||||
лов измерения с выдачей протоколов |
разователи угловых и линейных пере |
|
|||||
поверки. |
|
мещений (соответственно ПУП |
и |
|
|||
Основные технические |
характери |
ПЛП) обнуляются: преобразователь |
|
||||
стики реализованной системы пред |
ПУП, расположенный на валу привод |
|
|||||
ставлены в табл. 1. |
|
ного двигателя ДВ, обнуляется в верх |
|
||||
Система управления и измерения |
нем положении траверс ТР при замы |
|
|||||
обеспечивает вывод на экран монитора |
кании контактов конечного выключа |
|
|||||
текущих значений нагрузки, деформа |
теля КВ1 флажком ФЛ1, расположен |
|
|||||
ции и скорости деформирования ши |
ным на одной из траверс. Преобразова |
|
|||||
ны; автоматизированный подвод ис |
тели ПЛП1 и ПЛП2 обнуляются при |
|
|||||
пытываемой шины к силовой плите и |
сведении до соприкосновения упоров |
|
|||||
продавливающему наконечнику; авто |
УП, расположенных на их корпусах. |
|
|
|
|||
матический останов нагружения при |
|
Система управления стендом работа |
|
||||
достижении заданной величины на |
ет следующим образом. Компьютер |
|
|||||
грузки или деформации шины; расчёт |
формирует сигнал управления переме |
|
|||||
энергии разрушения шины; вывод на |
щением (деформированием) испыты |
29 |
|||||
экран монитора диаграмм нагружения |
ваемой шины. Сигнал обратной связи |
||||||
|
|
|
|
|
|
|
|
СТА 1/2008 |
www.cta.ru |
© 2008, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru

Р А З Р А Б О Т К И / К О Н Т Р О Л Ь Н О * И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы
Условные обозначения: ДВ — двигатель; РД — редуктор; ПЛП1 и ПЛП2 — первый и второй преобразователи линейных перемещений; КВ1 и КВ2 — первый и второй конечные выключатели; УП — упор; ХВ — ходовой винт; ФЛ1 и ФЛ2 — первый и второй флажки; ТР — траверса; Ш — шина; КЛ — колонна; НК — наконечник; СП — силовая плита; ДС — датчик силы; ПУП — преобразователь угловых перемещений; УИ — усилитель измерительный.
Рис. 2. Структурная схема стенда
|
по перемещению шины, который про |
ной на ней шиной по гладким колон |
флажком ФЛ2 отключается приводной |
||
|
порционален величине перемещения |
нам КЛ. Положение траверс, а значит и |
двигатель. |
||
|
шины от места, соответствующего об |
испытываемой шины, при известном |
Далее описывается, каким образом |
||
|
нулению преобразователя ПУП, посту |
шаге ходовых винтов однозначно опре |
определяются статические характери |
||
|
пает на интерфейсную плату ЛИР 930, |
деляется количеством оборотов вала |
стики шины. |
||
|
а затем в системный блок компьютера. |
приводного двигателя. При перемеще |
Наружные диаметр и ширина шины |
||
|
Сравнение сигналов задания и обрат |
нии траверс испытываемая шина авто |
определяются на ненагруженной ши |
||
|
ной связи осуществляется в компьюте |
матически устанавливается в одно из |
не, расположенной на силовой плите |
||
|
ре в цифровом виде. Отклонение меж |
положений: в случае определения гео |
СП. Наружный диаметр шины вычис |
||
|
ду реальным значением сигнала обрат |
метрических размеров и при испыта |
ляется по формуле: |
||
|
ной связи и заданным значением |
ниях на обжатие – до соприкоснове |
|
|
|
|
|
D = 2(L − l ), |
|
||
|
управляющего сигнала преобразуется |
ния испытываемой шины с силовой |
|
|
|
|
|
|
|
||
|
ЦАП многофункционального модуля |
плитой СП (при снятом наконечнике |
где L – расстояние от верхнего положе |
||
|
РСI 1716 в сигнал рассогласования U. |
НК), а при испытаниях на продавлива |
ния траверс (место, соответствующее |
||
|
В соответствии с величиной сигнала |
ние – до соприкосновения с наконеч |
обнулению преобразователя ПУП) до |
||
|
рассогласования ПИД регулятор, вхо |
ником НК. При нагружении шины |
силовой плиты – конструктивно из |
||
|
дящий в состав частотного регулятора, |
возникающая нагрузка измеряется дат |
вестная величина; |
||
|
формирует сигнал задания частоты. |
чиками силы ДС (их четыре). Сигналы |
l – величина перемещения траверс с |
||
|
Под воздействием этого сигнала час |
этих датчиков после усиления усилите |
закреплённой на них шиной от своего |
||
|
тотный регулятор изменяет частоту |
лями модулей УИ преобразуются АЦП |
верхнего положения до соприкоснове |
||
|
вращения приводного двигателя и |
многофункционального модуля РСI |
ния шины с силовой плитой. |
||
|
стремится привести разницу между за |
1716 и поступают в системный блок |
Наружная ширина (ширина профи |
||
|
данным и реальным значениями пара |
компьютера для измерения действую |
ля) шины определяется при соприкос |
||
|
метра управления к нулю. Крутящий |
щего значения нагрузки на шину, запи |
новении упоров УП с боковыми сторо |
||
|
момент, создаваемый приводным дви |
си диаграмм деформирования шины и |
нами шины как сумма перемещений, |
||
|
гателем, через червячный редуктор РД |
организации защит шины и стенда. |
измеренных преобразователями ПЛП1 |
||
|
вращает ходовые винты ХВ, которыми |
Конечный выключатель КВ2 срабаты |
и ПЛП2. Для обеспечения постоянного |
||
30 |
перемещаются траверсы ТР с за |
вает в крайнем нижнем положении |
контакта упоров УП с шиной корпуса |
||
креплённой в них осью и расположен |
траверс, при замыкании его контактов |
преобразователей ПЛП подпружинены. |
|||
|
|
|
|
|
|
|
www.cta.ru |
|
|
|
СТА 1/2008 |
© 2008, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru
|
Р А З Р А Б О Т К И / К О Н Т Р О Л Ь Н О * И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы |
|
|
|
|
|
|
||||||||
|
Продольная деформация шины опре |
ноплатного промышленного компью |
ния шины, но и пониженное энергопо |
||||||||||||
|
деляется в режиме обжатия шины мо |
тера РСА 6184 производства фирмы |
требление стенда. Снижение потреб |
||||||||||||
|
нотонно возрастающей нагрузкой, соз |
Advantech, |
установленного |
в корпусе |
ляемой электроприводом стенда мощ |
||||||||||
|
даваемой путём перемещения траверс |
IPC 610 этой же фирмы. В данном кор |
ности является следствием его функ |
||||||||||||
|
по колоннам. Датчиками силы измеря |
пусе также размещён многофункцио |
ционирования в следящем режиме, ко |
||||||||||||
|
ется воздействующая на шину нагруз |
нальный модуль РСI 1716 (Advantech), |
гда большую часть времени (подготов |
||||||||||||
|
ка, а продольная деформация шины |
который имеет 16 канальный АЦП, |
ка к проведению испытания, работа на |
||||||||||||
|
измеряется преобразователем ПУП как |
используемый для преобразования ин |
нагрузках, меньших |
номинальной) |
|||||||||||
|
расстояние, пройденное траверсами от |
формации с каналов измерения на |
приводной двигатель работает с низ |
||||||||||||
|
положения измерения наружного диа |
грузки, и два ЦАП, используемых для |
кой скоростью вращения ротора [3]. |
||||||||||||
|
метра шины до их положения при но |
формирования |
разностного сигнала |
Такой режим работы электропривода |
|||||||||||
|
минальной нагрузке. |
управления электроприводом стенда. |
позволяет не только экономить элек |
||||||||||||
|
Поперечная деформация шины опре |
Для измерения наружного диаметра, |
троэнергию, но и повысить ресурс са |
||||||||||||
|
деляется одновременно с измерением |
продольной деформации и определе |
мого двигателя и приводных механиз |
||||||||||||
|
продольной деформации шины как |
ния энергии разрушения шины при |
мов. |
|
|
|
|||||||||
|
сумма перемещений, измеренных пре |
менён растровый преобразователь уг |
|
|
|
|
|
||||||||
|
образователями ПЛП1 и ПЛП2. |
ловых |
перемещений |
ЛИР 158А |
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ |
||||||||||
|
Энергия разрушения шины определя |
(600 импульсов на один оборот вала), а |
Программное обеспечение комплек |
||||||||||||
|
ется в режиме продавливания, для чего |
для измерения наружной ширины и |
са разработано в среде Borland C++ |
||||||||||||
|
на силовую плиту устанавливается на |
поперечной деформации шины – рас |
Builder и работает под управлением ОС |
||||||||||||
|
конечник НК, который в процессе на |
тровые преобразователи линейных пе |
Windows |
XP. |
Использование ОС |
||||||||||
|
гружения шины вдавливается в ребро |
ремещений ЛИР 7 (преобразуемое пе |
Windows XP было продиктовано, с од |
||||||||||||
|
(«шашку») рисунка протектора до раз |
ремещение до 620 мм). Для согласова |
ной стороны, отсутствием особых тре |
||||||||||||
|
рушения шины или до упора наконеч |
ния и обработки сигналов с растровых |
бований к работе системы управления |
||||||||||||
|
ника в обод, на котором смонтирована |
преобразователей используется интер |
в реальном масштабе времени, а с дру |
||||||||||||
|
шина. В момент разрушения шины ре |
фейсная плата ЛИР 930, имеющая три |
гой стороны – применением стандарт |
||||||||||||
|
гистрируется нагрузка, приложенная к |
независимых канала измерения с че |
ного, общеизвестного интерфейса, об |
||||||||||||
|
шине, и глубина проникания наконеч |
тырёхкратной интерполяцией. Интер |
легчающего обучение работе на стенде |
||||||||||||
|
ника в шину. Энергия разрушения вы |
фейсная плата установлена в слот ISA |
и не требующего специальной подго |
||||||||||||
|
числяется по формуле [2]: |
промышленного компьютера. |
товки оператора. |
|
|
||||||||||
|
|
|
|
|
|
Аналоговая часть системы включает |
Взаимодействие управляющей про |
||||||||
|
|
W = |
P l |
, |
|
||||||||||
|
|
|
в свой состав тензометрические датчи |
граммы с аппаратной частью системы |
|||||||||||
|
|
|
|
||||||||||||
|
|
2 |
|
|
ки силы и их масштабирующие усили |
осуществляется |
с |
использованием |
|||||||
|
|
|
|
|
|
||||||||||
|
где P – нагрузка вдавливания в момент |
тели, объединённые пассивной кросс |
драйверов в виде пакета библиотек ди |
||||||||||||
|
разрушения шины, измеренная датчи |
платой, на которой дополнительно ус |
намической компоновки (DLL) фир |
||||||||||||
|
ками силы; |
тановлены разъёмы внутренней шины |
мы |
Advantech. Для |
взаимодействия |
||||||||||
|
l – глубина проникания наконечника, |
и источники питания +5 В и ±15 В |
программы с растровыми преобразова |
||||||||||||
|
измеренная преобразователем ПУП. |
производства фирмы Interpoint. Кросс |
телями перемещения создан ориги |
||||||||||||
|
Требуемая точность поддержания за |
плата размещена в корпусе IPC 610, в |
нальный драйвер, позволяющий осу |
||||||||||||
|
данной скорости деформирования ши |
котором также расположена плата оп |
ществлять съём данных измерения и |
||||||||||||
|
ны и её позиционирования обеспечи |
тронных развязок MPB 8 фирмы |
производить их предварительную об |
||||||||||||
|
вается использованием ПИД алгорит |
Octagon Systems с модулями ввода вы |
работку. |
|
|
|
|||||||||
|
ма регулирования и цифрового конту |
вода Opto 22 для гальванической изо |
Драйвер использует функции биб |
||||||||||||
|
ра регулирования параметра управле |
ляции силовой автоматики стенда и |
лиотеки Windows API, поддерживаю |
||||||||||||
|
ния, а точность определения геометри |
цифровых портов ввода вывода ком |
щей драйверы режима ядра, которые |
||||||||||||
|
ческих размеров шины и зависимости |
пьютера. |
|
|
|
|
позволяют читать, изменять и записы |
||||||||
|
размеров шины от силы её обжатия – |
В системе предусмотрена возмож |
вать таблицы карты разрешения ввода |
||||||||||||
|
использованием высокоточных рас |
ность измерения характеристик испы |
вывода (IOPM). Свободное обращение |
||||||||||||
|
тровых преобразователей перемеще |
тываемых шин при различных внут |
к |
регистрам интерфейсной платы |
|||||||||||
|
ния. |
ренних давлениях. Изменение давле |
ЛИР 930 на уровне пользователя осу |
||||||||||||
|
|
|
|
|
|
ния в шине обеспечивается аппарату |
ществляется после сброса соответст |
||||||||
|
АППАРАТНОЕ ОБЕСПЕЧЕНИЕ |
рой пользователя стенда. |
|
вующих битов IOPM. |
|
||||||||||
|
Рассмотренная система управления |
Аппаратные средства системы раз |
Программа управления работает па |
||||||||||||
|
и измерения статических характери |
мещены |
|
в |
шкафу |
PROLINE |
раллельно по двум потокам: один |
||||||||
|
стик пневматических шин представля |
(1400×600×600 мм) производства фир |
управляет аппаратурой системы (поток |
||||||||||||
|
ет собой программно аппаратный |
мы Schroff. |
|
|
|
управления аппаратурой), второй реа |
|||||||||
|
комплекс, осуществляющий сбор, об |
Использование частотно управляе |
лизует интерфейс пользователя (основ |
||||||||||||
|
работку и накопление измерительной |
мого следящего привода для управле |
ное приложение). Формирование вре |
||||||||||||
|
информации о физических параметрах |
ния перемещением шины и её нагру |
менных |
соотношений и временная |
|||||||||||
|
испытываемых шин, а также управле |
жением обеспечивает не только высо |
синхронизация потоков осуществляют |
||||||||||||
32 |
ние исполнительными механизмами |
кую точность |
позиционирования и |
ся с использованием функций генера |
|||||||||||
стенда. Комплекс построен на базе од |
поддержания скорости деформирова |
ции сигналов событий, оповещающих |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
|
|
|
|
|
|
|
|
|
СТА 1/2008 |
||||
© 2008, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru
Р А З Р А Б О Т К И / К О Н Т Р О Л Ь Н О * И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы
|
|
|
|
|
|
|
|
|
|
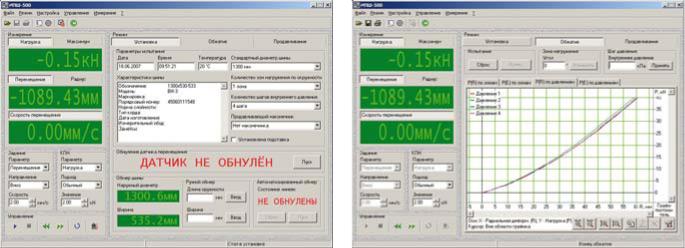
Рис. 3. Главное окно системы управления в режиме установки |
|
Рис. 4. Главное окно системы управления в режиме |
|
||
|
|
характеристик испытываемой шины и задания параметров испытания |
|
обжатия шины |
|
|
|
|
|
|
|
|
|
|
|
|
|
приложение об изменении состояния |
сле преобразования ЦАП суммируется |
ния асинхронного частотно управ |
|||
|
|
АЦП, имеющихся в DLL драйверах. |
с сигналом обратной связи. В описы |
ляемого привода; |
|||
|
|
Поток управления аппаратурой про |
ваемой системе компьютер формирует |
● повысить экономическую эффектив |
|||
|
|
изводит: |
не сигнал задания регулируемого пара |
ность за счёт увеличения ресурса дви |
|||
|
|
● съём данных с каналов измерения; |
метра, а непосредственно сигнал рас |
гателя и приводных механизмов, уве |
|||
|
|
● выдачу в ЦАП кодов разностных сиг |
согласования в цифровом виде, вычис |
личения межремонтного пробега и |
|||
|
|
налов; |
ляемый из сигнала обратной связи и |
сокращения затрат на обслуживание |
|||
|
|
● контроль и выдачу исполнительных |
требуемого сигнала задания. |
и ремонт стенда в среднем на 30%; |
|||
|
|
сигналов защит; |
Дружественный и простой пользова |
● увеличить достоверность определе |
|||
|
|
● фильтрацию и предварительную об |
тельский интерфейс системы обеспе |
ния статических характеристик ис |
|||
|
|
работку измерительной информа |
чивает вывод на монитор информаци |
пытываемых шин за счёт использо |
|||
|
|
ции; |
онно насыщенных и удобных для вос |
вания высокоточных растровых пре |
|||
|
|
● вычисление экстремальных значе |
приятия экранных форм, отражающих |
образователей угловых и линейных |
|||
|
|
ний и скоростей изменения основ |
текущее состояние процесса испыта |
перемещений; |
|||
|
|
ных параметров; |
ния. Это значительно упрощает про |
● повысить отказоустойчивость стенда |
|||
|
|
● накопление массивов измеритель |
цесс управления стендом. Главное окно |
за счёт использования высоко |
|||
|
|
ной информации. |
системы управления в установочном |
надёжных изделий фирм Advantech и |
|||
|
|
Основное приложение осуществляет |
режиме и в режиме обжатия шины по |
Octagon Systems и минимального ко |
|||
|
|
всю остальную работу, связанную с ин |
казано соответственно на рис. 3 и 4. |
личества применённых оригиналь |
|||
|
|
терфейсом пользователя: |
|
|
|
ных аппаратных средств. ● |
|
|
|
● создаёт экранные формы системы |
ЗАКЛЮЧЕНИЕ |
|
ЛИТЕРАТУРА |
||
|
|
управления; |
Описанная система управления и из |
||||
|
|
● отображает измерительную инфор |
мерения статических характеристик |
1. Патент 63065 Российская Федерация. |
|||
|
|
мацию; |
пневматических шин реализована на |
Стенд для определения статических ха |
|||
|
|
● осуществляет построение графиков |
стенде ИПШ 500 в ОАО «ОМСКШИ |
рактеристик пневматических шин / Ро |
|||
|
|
и диаграмм на программных графо |
НА» и функционирует в составе этого |
женцев В.С., Мараховский В.И., Петров |
|||
|
|
построителях; |
стенда с ноября 2006 года. |
А.С. и др. ; опубл. 2007, Бюл. № 13. |
|||
|
|
● производит расчёт энергии разруше |
Внедрение системы на стенде позво |
2. ГОСТ 4754 97. Шины пневматические |
|||
|
|
ния шины; |
лило: |
|
для легковых автомобилей, прицепов к |
||
|
|
● формирует протоколы испытания и |
● повысить производительность испы |
ним, легких грузовых автомобилей и ав |
|||
|
|
осуществляет их печать; |
таний, снизить трудоёмкость и улуч |
тобусов особо малой вместимости. Техни |
|||
|
|
● производит архивирование результа |
шить условия труда оператора за счёт |
ческие условия. |
|||
|
|
тов испытаний; |
автоматизации процесса испытаний |
3. Браславский И.Я., Ишматов З.Ш., Поля |
|||
|
|
● реализует автоматический процесс |
и одновременного определения на |
ков В.Н. Энергосберегающий асинхрон |
|||
|
|
испытания шины. |
ружных диаметра и ширины испы |
ный электропривод. — М. : Академия, |
|||
|
|
Использование цифрового контура |
тываемой шины; |
|
2004. — 256 с. |
||
|
|
регулирования перемещения испыты |
● повысить точность воспроизведения |
4. Роженцев В.С., Новиков А.В., Шаманин |
|||
|
|
ваемой шины и её деформирования |
задаваемых режимов испытаний за |
А.В. и др. Автоматизированная система |
|||
|
|
потребовало переработки программно |
счёт использования цифрового кон |
для определения механических свойств |
|||
|
|
го обеспечения, ориентированного на |
тура регулирования и электроприво |
материалов // Современные технологии |
|||
|
|
аналоговое регулирование параметра |
да, работающего в следящем режиме; |
автоматизации. 2007. № 2. С. 72 78. |
|||
34 |
|
управления [4], когда сформирован |
● снизить энергопотребление стенда в |
|
|
||
|
ный компьютером сигнал задания по |
среднем на 40% за счёт использова |
E mail: prokopenko777@mail.ru |
||||
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
|
|
|
СТА 1/2008 |
|
© 2008, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru