

330 / ЗаданКурсЖурналПолныйМПУСУ / 1СУ_СтендомКамерой
.pdfРАЗРАБОТКИ АТОМНАЯ ЭНЕРГЕТИКА
Система управления опытным универсальным стендом камерой
Андрей Шустов, Марианна Шустова
В статье описывается система управления опытным универсальным стендом камерой для отработки основных технологических процессов производства МОКС топлива. Перед разработчиками стояла задача создания современного и надёжного решения, обеспечивающего безопасность обслуживающего персонала и высокую точность позиционирования механизмов.
|
ИСТОРИЯ СОЗДАНИЯ СИСТЕМЫ |
Разработчикам было необходимо вы |
Горизонтальное перемещение крана |
|||||
|
В настоящее время в рамках феде |
полнить ряд требований, предъявляе |
в продольном направлении осуществ |
|||||
|
ральной целевой программы «Ядерные |
мых к системе: |
ляется путём перемещения моста по |
|||||
|
энерготехнологии нового |
поколения» |
● устранение оператора от работы в ка |
рельсовому пути, а в поперечном нап |
||||
|
реализуется проект создания производ |
мере (от работы в условиях, опасных |
равлении – путём перемещения тележ |
|||||
|
ства виброуплотнённого МОКС топли |
для здоровья); |
ки по рельсам моста. Вертикальное пе |
|||||
|
ва для реактора БН 800, который стро |
● создание условий для обеспечения |
ремещение |
обеспечивает |
механизм |
|||
|
ится на Белоярской АЭС, а также для |
удобства работы оператора и высо |
подъёма. |
|
|
|||
|
гибридной зоны уже действующего на |
кой степени безопасности работы |
|
|
|
|||
|
той же АЭС реактора БН 600. Проект |
эксплуатирующего персонала; |
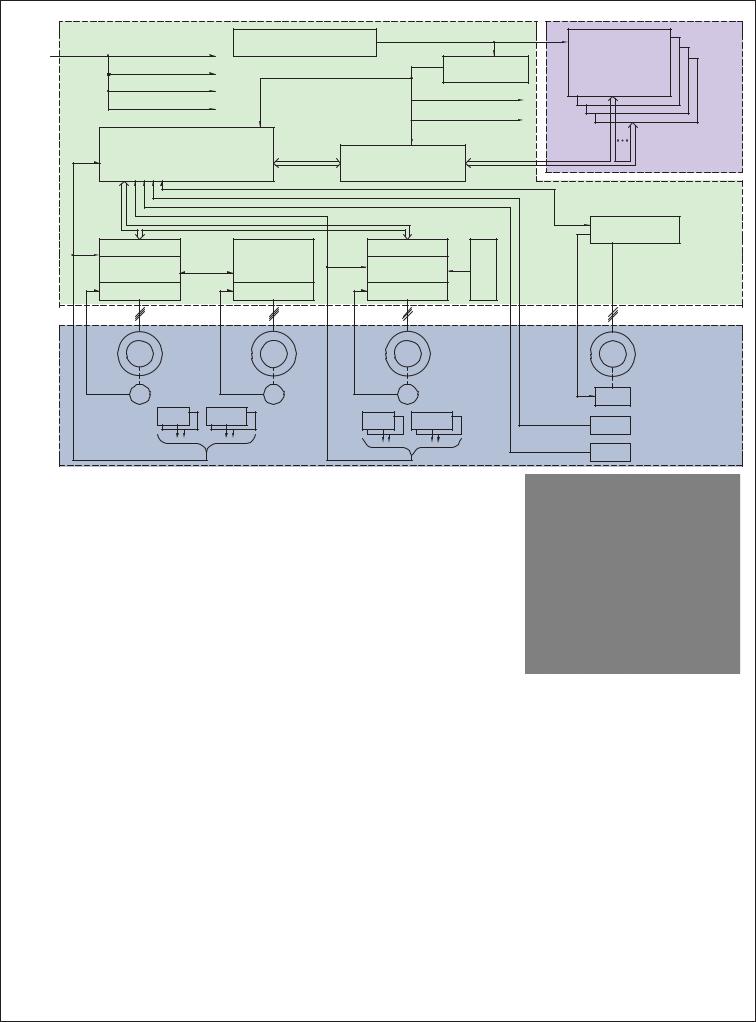
АРХИТЕКТУРА СИСТЕМЫ |
|||||
|
предусматривает строительство комп |
● достижение точности позициониро |
Система имеет трёхуровневую архи |
|||||
|
лекса для МОКС топлива на Горно хи |
вания крана при перемещениях в го |
тектуру. |
|
|
|||
|
мическом комбинате |
мощностью |
ризонтальной плоскости 5 мм; |
Нижний уровень включает датчики |
||||
|
14 тонн в год. Технология производства |
● обеспечение простоты эксплуатации |
положения исполнительных механиз |
|||||
|
гранулята МОКС топлива является сег |
и технического обслуживания; |
мов, устройства управления исполни |
|||||
|
ментом замкнутого ядерного топливно |
● унификация и стандартизация при |
тельными механизмами и обеспечивает: |
|||||
|
го цикла и позволяет использовать плу |
меняемых программных и техничес |
● преобразование контролируемых по |
|||||
|
тоний для генерации электроэнергии. |
ких средств. |
ложений исполнительных механиз |
|||||
|
ОАО «СвердНИИхиммаш» как гене |
После ввода в эксплуатацию систе |
мов в электрические сигналы; |
|||||
|
ральный проектировщик занималось |
мы должен быть выполнен анализ её |
● преобразование управляющих элект |
|||||
|
разработкой основной части комплек |
технических возможностей и характе |
рических |
сигналов в механические |
||||
|
сов |
технологического оборудования |
ристик для формирования требований |
перемещения исполнительных меха |
||||
|
для |
производства |
МОКС топлива. |
к автоматизированной системе управ |
низмов. |
|
|
|
|
В рамках проведения опытно конструк |
ления штатными камерами, которые |
Средний уровень содержит устрой |
|||||
|
торских работ в этом направлении спе |
будут использоваться для производства |
ства, обеспечивающие взаимодействие |
|||||
|
циалистам ООО «НПП «АИС» была |
МОКС топлива. |
с соседними (в основном, с нижним) |
|||||
|
поставлена задача разработки системы |
|
уровнями системы и реализующие сле |
|||||
|
управления опытным универсальным |
ОБЪЕКТ УПРАВЛЕНИЯ |
дующие функции: |
|
||||
|
стендом камерой, |
предназначенным |
Кран мостовой расположен в техноло |
● сбор и обработку сигналов с датчи |
||||
|
для контроля и управления в реальном |
гической камере. Он состоит из таких уз |
ков положения; |
|
||||
|
масштабе времени мостовым трёхпози |
лов, как мост и тележка, и имеет меха |
● формирование управляющих сигна |
|||||
|
ционным краном. Кран должен осуще |
низмы продольного, поперечного и вер |
лов на устройства управления испол |
|||||
|
ствлять точное позиционирование при |
тикального перемещения. В камере |
нительными механизмами; |
|||||
|
транспортировке контейнеров и монта |
смонтирована платформа с рельсовыми |
● автоматическую диагностику; |
|||||
|
же/демонтаже оборудования внутри |
путями, по которым перемещается мост. |
● обмен информацией с верхним уров |
|||||
|
технологической камеры, которая бу |
На мосту располагаются рельсы, по ко |
нем системы. |
|
||||
|
дет использоваться для отработки ос |
торым перемещается тележка, оборудо |
Верхний уровень состоит из уст |
|||||
64 |
новных технологических |
процессов |
ванная механизмом для подъёма контей |
ройств, предоставляющих |
интерфейс |
|||
производства МОКС топлива. |
неров и технологического оборудования. |
работы с оператором, и обеспечивает: |
||||||
www.cta.ru |
© СТА-ПРЕСС |
СТА 1/2011 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р А З Р А Б О Т К И /А Т О М Н А Я Э Н Е Р Г Е Т И К А |
|
||||
Шкаф оборудования |
|
|
|
|
|
~220 B, 50 Гц |
|
|
|
|
|
|
Пульт оператора |
|
|||
|
|
|
|
ИБП АРС Smart Ups |
|
|
|
|
|
|
|
|
|||||
~380 B |
к MOVIDRIVE 61B 1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Панельный компьютер |
|
|
|||||
|
|
|
|
|
|
|
|
|
=24 В |
|
|
|
|
|
|||
|
к MOVIDRIVE 61B 2 |
|
=24 В |
|
|
|
|
БП АС/DC ~220/=24 |
|
РРС 177Т |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
TIS 75 124 |
|
|
|
|
|
|
|
|
к MOVIDRIVE 61B 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
к ВБИ 1...5 |
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
|
к пускателю М4 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
||
|
|
|
|
|
|
|
|
|
к TCC16L, TCB08RT, TCB08L |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Программируемый логический контроллер |
Ethernet |
|
Коммутатор |
|
|
|
Ethernet |
|
|
|
|
|||||
|
|
РО6R 08 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
EDS 208 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Ethernet |
|
|
|
|
|
|
Пускатель |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
DFE11B |
|
|
|
|
|
|
DFE11B |
|
03DBG60B |
|
|
|
|
|
|
|
|
MOVIDRIVE 61B |
|
MOVIDRIVE 61B |
|
MOVIDRIVE 61B |
|
|
|
|
|
|
|
|||||
|
|
синхр. |
|
|
2 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
DЕН11B |
|
|
DЕН11B |
|
|
|
DЕН11B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Технологическая камера |
|
|
|
М1 |
|
|
М2 |
|
|
|
М3 |
|
|
|
|
М4 |
|
|
|
|
|
3 |
|
|
3 |
|
|
|
|
3 |
|
|
|
|
ЭТ 3 |
|
|
|
|
|
ХСК 1 2 |
ВБИ 1 |
2 |
|
|
ХСК 3 |
4 |
ВБИ 3 |
4 |
|
|
|
ХСК 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВБИ 5 |
|
|
|
Условные обозначения: ЭТ – электрический тормоз; М1…4 – двигатели; DFE11B – плата |
|
|
|
|
|
|
|
||||||||||
интерфейса Ethernet (Modbus TCP); DEH11B – плата обработки сигналов датчика обратной связи; |
|
|
|
|
|
|
|||||||||||
Э – датчик обратной связи (преобразователь угловых перемещений – энкодер); |
|
|
|
|
|
|
|
|
|||||||||
DBG60B 03 – пульт с клавиатурой и дисплеем. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рис. 1. Структурная схема системы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
● обработку и визуальное представле |
Датчики положения исполнительных |
|
|
|
|
|
|
||||||||||
ние информации, поступающей со |
механизмов и устройства управления |
|
|
|
|
|
|
||||||||||
среднего уровня; |
|
|
исполнительными механизмами отно |
|
|
|
|
|
|
||||||||
● отображение положения крана в ка |
сятся к нижнему уровню системы. Дат |
|
|
|
|
|
|
||||||||||
мере; |
|
|
|
|
чики положения исполнительных ме |
|
|
|
|
|
|
||||||
● отображение |
текущих |
значений |
ханизмов размещены в технологичес |
|
|
|
|
|
|
||||||||
контролируемых параметров; |
|
кой камере (рис. 2), устройства управ |
|
|
|
|
|
|
|||||||||
● обработку команд оператора и их пе |
ления исполнительными механизмами |
Рис. 2. Оборудование в технологической |
|
||||||||||||||
редачу на средний уровень системы. |
– в шкафу оборудования (рис. 3). ПЛК, |
камере |
|
|
|
|
|
||||||||||
Структурная схема системы приведе |
УСО, коммуникационное оборудова |
|
|
|
|
|
|
||||||||||
на на рис. 1. |
|
|
|
ние, ИБП и БП, относящиеся к средне |
рийного ограничения движения приво |
|
|||||||||||
|
|
|
|
|
му уровню системы, тоже размещены в |
дов, бесконтактные датчики пред |
|
||||||||||
ТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ |
шкафу оборудования. В качестве шка |
аварийного |
ограничения |
движения |
|
||||||||||||
СИСТЕМЫ |
|
|
|
фа оборудования использован универ |
приводов, датчики обратной связи уст |
|
|||||||||||
В состав технического обеспечения |
сальный шкаф компании Rittal серии |
ройств управления исполнительными |
|
||||||||||||||
системы входят: |
|
|
|
TS8 со степенью защиты IP66. Пульты |
механизмами |
(преобразователи угло |
|
||||||||||
● датчики положения исполнительных |
оператора, входящие в состав верхнего |
вых перемещений двигателей – энко |
|
||||||||||||||
механизмов; |
|
|
|
уровня |
системы, |
расположены |
вдоль |
деры). С целью аварийного ограниче |
|
||||||||
● устройства управления исполнитель |
передней стены камеры (рис. 4). |
|
ния перемещения слева и справа при |
|
|||||||||||||
ными механизмами; |
|
|
Датчики положения предназначены |
водов движения моста и тележки, а так |
|
||||||||||||
● программируемый логический конт |
для бесконтактного или контактного |
же аварийного ограничения движения |
|
||||||||||||||
роллер (ПЛК); |
|
|
|
определения положения объектов – в |
сверху |
привода |
подъёма/опускания |
|
|||||||||
● устройства связи с объектом (УСО); |
данном случае механизмов крана, а |
крюковой подвески крана используют |
|
||||||||||||||
● коммуникационное оборудование; |
также |
индикации |
факта |
попадания |
ся контактные концевые выключатели |
|
|||||||||||
● пульты оператора; |
|
|
крана в зону срабатывания и выдачи |
Schneider Electric типа XCK, работаю |
|
||||||||||||
● источник бесперебойного |
питания |
соответствующего дискретного сигна |
щие на разрыв электрической цепи |
|
|||||||||||||
(ИБП); |
|
|
|
|
ла. В качестве датчиков положения ис |
привода. Для предаварийного ограни |
65 |
||||||||||
● блоки питания (БП). |
|
|
пользуются |
контактные датчики ава |
чения перемещения слева и справа, для |
||||||||||||
СТА 1/2011 |
|
|
|
|
|
|
© СТА-ПРЕСС |
|
|
|
|
|
|
www.cta.ru |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||

|
|
Р А З Р А Б О Т К И /А Т О М Н А Я Э Н Е Р Г Е Т И К А |
|
|
|
|
|
|||
|
|
|
|
|
|
теры PPC 177T показали себя надёж |
||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
ными и удобными в работе устройства |
||||
|
|
|
|
|
|
ми с широкой функциональностью. |
||||
|
|
|
|
|
|
Для управления |
исполнительны |
|||
|
|
|
|
|
|
ми механизмами применены частот |
||||
|
|
|
|
|
|
ные преобразователи SEW eurodrive |
||||
|
|
|
|
|
|
MOVIDRIVE MDX61B, реверсивный |
||||
|
|
|
|
|
|
пускатель ПМ12 010651 и блок управ |
||||
|
|
|
|
|
|
ления электромагнитным тормозом |
||||
|
|
|
|
|
|
привода |
подъёма, |
встроенный в |
||
|
|
|
|
|
|
клеммную коробку двигателя. Эти уст |
||||
|
|
|
|
|
|
ройства обеспечивают преобразование |
||||
|
|
|
|
|
|
команд ПЛК в управляющие сигналы |
||||
|
|
|
|
|
|
для исполнительных механизмов. |
||||
|
|
|
|
|
|
Для стабилизации и поддержания |
||||
|
|
|
|
|
|
электропитания |
системы в течение |
|||
|
|
|
|
|
|
расчётного времени при пропадании |
||||
|
|
|
|
|
|
сетевого |
напряжения |
используется |
||
|
|
|
|
|
|
ИБП SUA1500RMI2U компании APC. |
||||
|
|
|
|
|
|
Питание оборудования системы посто |
||||
|
|
|
|
|
|
янным напряжением с номиналом 24 В |
||||
|
|
|
|
|
|
производится от БП Traco Power TIS |
||||
|
|
|
|
|
|
75 124. |
|
|
|
|
|
|
|
|
|
|
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ |
||||
|
|
|
|
|
|
СИСТЕМЫ |
|
|
|
|
|
|
|
|
|
|
Программное обеспечение (ПО) сис |
||||
|
|
|
|
|
|
темы составляют программные сред |
||||
|
|
|
|
|
|
ства обработки, хранения, передачи и |
||||
|
|
|
|
|
|
отображения информации. Функцио |
||||
|
|
Рис. 3. Шкаф с установленным |
|
нально оно делится на три части: |
||||||
|
|
|||||||||
|
|
оборудованием |
|
|
Рис. 4. Пульт оператора |
● ПО верхнего уровня (пульта операто |
||||
|
|
|
|
|
|
ра); |
|
|
|
|
|
|
определения |
исходного положения |
управления исполнительными меха |
● ПО среднего уровня (ПЛК); |
|||||
|
|
(нуль позиции) приводов движения |
низмами) объединены в локальную |
● ПО нижнего уровня (частотного пре |
||||||
|
|
моста и тележки, а также для предава |
вычислительную сеть (ЛВС) Ethernet. |
образователя – ЧП). |
|
|||||
|
|
рийного ограничения движения сверху |
В ЛВС используется сетевой коммута |
ПО каждого уровня, в свою очередь, |
||||||
|
|
привода подъёма/опускания крюковой |
тор Moxa EDS 208. |
подразделяются на общее и специаль |
||||||
|
|
подвески крана применены бескон |
Пульты оператора обеспечивают воз |
ное. Состав общего и специального ПО |
||||||
|
|
тактные индуктивные выключатели |
можность управления системой путём |
пульта оператора, ПЛК и ЧП приведён |
||||||
|
|
ЗАО «Сенсор» типа ВБИ. Увеличение |
задания оператором команд, а также |
в табл. 1. |
|
|
|
|
||
|
|
точности перемещения приводов дви |
производят отображение контролируе |
Системное ПО TeNIX 5 поставляется |
||||||
|
|
жения моста и тележки в заданную ко |
мой информации: |
ЗАО «Промконтроллер»; оно является |
||||||
|
|
ординату достигается с помощью пре |
● текущего состояния компонентов |
средой выполнения прикладной про |
||||||
|
|
образователей |
угловых перемещений |
системы; |
граммы пользователя и обеспечивает |
|||||
|
|
SEW eurodrive типа EH1S (на рис. 1 |
● ошибок и блокировок при выполне |
доступ ко всем ресурсам ПЛК. Систем |
||||||
|
|
обозначены «Э»). |
нии операций; |
ное ПО TeNIX 5 включает в свой со |
||||||
|
|
ПЛК обеспечивает сбор, преобразо |
● состояния выполнения команд опе |
став: |
|
|
|
|
||
|
|
вание, первичную обработку и переда |
ратора. |
● ядро многозадачной |
операционной |
|||||
|
|
чу информации на пульты оператора, а |
В качестве пультов оператора ис |
системы Linux; |
|
|
|
|||
|
|
также формирование команд на уст |
пользуются панельные промышлен |
● драйверы обеспечения работы ядра с |
||||||
|
|
ройства управления исполнительными |
ные компьютеры PPC 177T компании |
аппаратурой ПЛК; |
|
|
||||
|
|
механизмами. ПЛК представлен про |
Advantech. Эти компьютеры построены |
● драйверы подсистемы ввода вывода, |
||||||
|
|
цессорным модулем P06R 08 BASE |
на базе процессора Intel Core 2 Duo с |
взаимодействующие со встроенным |
||||||
|
|
DIO (ЗАО ПК «Промконтроллер»). За |
частотой 1,8 ГГц, имеют 17 дюймовый |
ПО модулей ввода вывода; |
||||||
|
|
согласование сигналов отвечают УСО, |
цветной монитор с резистивной сен |
● файловую систему; |
|
|
||||
|
|
в качестве которых выбраны модуль |
сорной панелью и память DDR2 объё |
● ПО, обеспечивающее пользователь |
||||||
|
|
клеммных соединений TCC16L, а так |
мом 1 Гбайт. Для подключения к ЛВС |
ский функционал ПЛК (включая ре |
||||||
|
|
же умощнители дискретных сигналов |
используется один из двух имеющихся |
зервирование, |
диагностику, под |
|||||
|
|
TCB08RT и TCB08L. |
у них гигабитных портов Ethernet. Сте |
держку Modbus и т.д.). |
|
|||||
66 |
|
Основные |
компоненты системы |
пень защиты по передней панели – |
Управляющая программа ПЛК раз |
|||||
|
(пульт оператора, ПЛК и устройства |
IP65. За время эксплуатации компью |
работана специалистами ООО «НПП |
|||||||
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
© СТА-ПРЕСС |
СТА 1/2011 |
|
|
|
Р А З Р А Б О Т К И /А Т О М Н А Я Э Н Е Р Г Е Т И К А |
|
|
|
|
|
|
|
||
|
«АИС» и предназначена для управле |
|
|
Состав общего и специального ПО |
Таблица 1 |
|||||
|
ния работой ПЛК, |
производящего |
|
|
|
|
||||
|
непрерывный сбор и обработку дан |
ВИД ПО |
|
ПО ПУЛЬТА ОПЕРАТОРА |
|
ПО ПЛК |
ПО ЧП |
|
||
|
|
● Операционная система Windows |
|
|
|
|
||||
|
ных, поступающих от УСО, и передачу |
|
|
|
|
|
||||
|
|
7 Professional |
|
|
Среда выполнения |
● IPOSplus |
|
|||
|
информации по локальной сети на |
|
● SCADA система GENESIS32 |
|
прикладной программы |
|
||||
|
Общее |
|
● Встроенный регулятор |
|
||||||
|
пульт оператора. Программа выполня |
|
(ICONICS) |
|
|
пользователя – |
синхронного режима |
|
||
|
|
● Драйверы системных устройств |
|
системное ПО TeNIX 5 |
|
|||||
|
ет следующие функции: |
|
● Tecon ОРС сервер |
|
|
|
|
|
||
|
● сбор, обработку и передачу на пульт |
Специальное |
Управляющая программа пульта |
|
Управляющая программа |
Файл конфигурации |
|
|||
|
оператора информации о положении |
|
оператора |
|
|
ПЛК |
параметров ЧП |
|
||
|
промышленной |
автоматизации. Спе |
приводов моста используется встроен |
|||||||
|
исполнительных механизмов, состоя |
|||||||||
|
нии ЧП и технических средств ПЛК, |
циалистами ООО «НПП «АИС» c по |
ный регулятор синхронного режима – |
|||||||
|
результатах выполнения операций; |
мощью SCADA системы GENESIS32 |
это специальная программа, использу |
|||||||
|
● приём значений уставок и команд с |
(ICONICS) разработана управляющая |
ющая для работы инкрементные сиг |
|||||||
|
пульта оператора; |
|
программа пульта оператора, которая |
налы от ведущего устройства (сигналы |
||||||
|
● выполнение команд, поступающих с |
реализует интерфейс пульта оператора |
инкрементного датчика). Данная про |
|||||||
|
пульта оператора; |
|
и выполняет следующие функции: |
грамма позволяет управлять нескольки |
||||||
|
● диагностику технических средств |
● приём информации, поступающей |
ми приводами в синхронном режиме. |
|||||||
|
ПЛК; |
|
от ПЛК; |
|
|
|
|
ПО ЧП настраивается в процессе |
||
|
● автоматическое управление функци |
● отображение текущих и заданных |
ввода ЧП в эксплуатацию с последую |
|||||||
|
онированием программных и техни |
значений координат; |
|
|
щей подстройкой параметров. Управ |
|||||
|
ческих средств ПЛК. |
|
● отображение |
состояния |
датчиков, |
ление работой приводов осуществляет |
||||
|
Tecon OPC сервер (далее OPC сер |
мнемосхемы |
текущего |
положения |
ся записью значений параметров и со |
|||||
|
вер) является универсальным сред |
крана; |
|
|
|
|
ответствующего |
слова управления в |
||
|
ством доступа к данным ПЛК со сторо |
● отображение |
работоспособности |
ЧП из управляющей программы ПЛК |
||||||
|
ны SCADA системы. OPC сервер по |
программно технического комплек |
по протоколу Modbus TCP. |
|||||||
|
лучает данные из ПЛК по сконфигури |
са системы; |
|
|
|
|
|
|
||
|
рованному каналу связи. В процессе |
● приём и обработка управляющих ко |
ОБЩЕЕ ОПИСАНИЕ РАБОТЫ |
|||||||
|
работы OPC сервера ведётся журнал |
манд; |
|
|
|
|
СИСТЕМЫ |
|
|
|
|
событий с регистрацией времени под |
● организация, просмотр и ведение баз |
Перемещение как моста, так и тележ |
|||||||
|
ключения и отключения, нарушений |
данных; |
|
|
|
|
ки крана осуществляется путём задания |
|||
|
качества передачи данных. Реализова |
● формирование и выдача текстовых и |
приводу соответствующей координаты |
|||||||
|
на процедура автоматического восста |
звуковых сообщений оператору; |
и сигнала, разрешающего перемеще |
|||||||
|
новления сетевого соединения. |
● защита |
от несанкционированного |
ние. Привод автоматически отрабаты |
||||||
|
OPC сервер обеспечивает выполне |
доступа, разграничение полномочий |
вает заданное перемещение и останав |
|||||||
|
ние следующих функций: |
пользователей. |
|
|
ливается в заданной координате. Гори |
|||||
|
● подключение (создание простран |
ЧП имеют стандартно встроенное |
зонтальные перемещения крана выпол |
|||||||
|
ства имён) для одного или более |
ПО IPOSplus – это система автомати |
няются тремя частотно регулируемыми |
|||||||
|
ПЛК; |
|
ческого позиционирования и управле |
приводами, каждый из которых состоит |
||||||
|
● доступ к пространству переменных |
ния циклом работы приводов. Основ |
из мотор редуктора и частотного преоб |
|||||||
|
ПЛК; |
|
ные возможности IPOSplus: |
разователя. Перемещение моста крана |
||||||
|
● восстановление соединения в случае |
● высокоэффективное позициониро |
осуществляется двумя приводами, ра |
|||||||
|
разрыва связи с ПЛК; |
вание привода при наличии обрат |
ботающими в режиме синхронизации. |
|||||||
|
● автоматический запуск сервера при |
ной связи (датчика); |
|
|
Перемещение тележки осуществляется |
|||||
|
запуске SCADA системы и загрузка |
● различные способы обмена данными |
с помощью третьего привода. Точность |
|||||||
|
рабочей конфигурации; |
(системная шина S Bus, RS 485, се |
останова обеспечивается встроенной в |
|||||||
|
● мониторинг значений переменных |
тевые интерфейсные модули); |
ЧП системой позиционирования и ав |
|||||||
|
ПЛК, а также запись переменных че |
● обработка цифровых и аналоговых |
томатического управления циклом ра |
|||||||
|
рез интерфейс пользователя OPC |
входных/выходных сигналов; |
боты IPOSplus, а также наличием инк |
|||||||
|
сервера; |
|
● выбор скорости и темпа позициони |
рементных датчиков обратной связи на |
||||||
|
● ведение журнала работы, в котором |
рования; |
|
|
|
мотор редукторах. Синхронность рабо |
||||
|
фиксируются основные события и |
● обработка сигналов датчика абсо |
ты двух мотор редукторов перемещения |
|||||||
|
нештатные ситуации; |
лютного отсчёта; |
|
|
моста обеспечивается встроенным регу |
|||||
|
● сохранение и загрузка конфигурации |
● считывание и запись всех парамет |
лятором синхронного режима (из ПО |
|||||||
|
OPC сервера. |
|
ров преобразователя через команды |
ЧП), который постоянно сравнивает уг |
||||||
|
SCADA система является комплек |
обмена данными; |
|
|
ловое положение роторов ведущего и |
|||||
|
сом приложений для |
операционных |
● изменение параметров во время пе |
ведомого двигателей. Аварийное огра |
||||||
|
систем Microsoft Windows, построен |
ремещения (конечное положение, |
ничение перемещений моста и тележки |
|||||||
|
ных в соответствии со спецификацией |
скорость и темп позиционирования, |
крана осуществляется с помощью пе |
|||||||
|
OPC, и предназначена для создания |
вращающий момент). |
|
|
реключателей конечных XCK. |
|||||
|
программного обеспечения сбора дан |
Перемещение моста крана осуществ |
Вертикальное |
перемещение крана |
||||||
68 |
ных и оперативного |
диспетчерского |
ляется двумя частотно регулируемыми |
вверх или вниз осуществляется при на |
||||||
управления верхнего |
уровня систем |
приводами. Для синхронизации работы |
жатии и удерживании оператором со |
|||||||
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
© СТА-ПРЕСС |
СТА 1/2011 |
|
|
|
|
Р А З Р А Б О Т К И /А Т О М Н А Я Э Н Е Р Г Е Т И К А |
|
|
|
|
|
|
|
|
|
ответствующей кнопки управления, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
при отпускании кнопки движение |
|
|
|
|
|
|
|
|
|
прекращается. Обеспечение точности |
|
|
|
|
|
|
|
|
|
вертикального перемещения системой |
|
|
|
|
|
|
|
|
|
не контролируется и полностью возла |
|
|
|
|
|
|
|
|
|
гается на оператора. Ограничение |
|
|
|
|
|
|
|
|
|
подъёма осуществляется с помощью |
|
|
|
|
|
|
|
|
|
индуктивного датчика ВБИ, аварийное |
|
|
|
|
|
|
|
|
|
ограничение подъёма – с помощью пе |
|
|
|
|
|
|
|
|
|
реключателя конечного XCK. |
|
|
|
|
|
|
|
|
|
Перемещение крана осуществляется |
|
|
|
|
|
|
|
|
|
по команде оператора, передаваемой |
|
|
|
|
|
|
|
|
|
интерфейсом управляющей програм |
|
|
|
|
|
|
|
|
|
мы пульта оператора. Команда опера |
|
|
|
|
|
|
|
|
|
тора посредством ОРС сервера посту |
|
|
|
|
|
|
|
|
|
пает на ПЛК. ПЛК, анализируя теку |
|
|
|
|
|
|
|
|
|
щее состояние системы, формирует ко |
|
|
|
|
|
|
|
|
|
манды на ЧП. |
|
|
|
|
|
|
|
|
|
Для эффективного управления кра |
|
|
|
|
|
|
|
|
|
ном предусмотрено несколько режи |
|
|
|
|
|
|
|
|
|
мов работы системы: |
|
|
|
|
|
|
|
|
|
● пусковой; |
|
|
|
|
|
|
|
|
|
● ручной; |
Рис. 5. Окно управляющей программы пульта оператора в ручном режиме |
|
|
||||
|
|
● полуавтоматический; |
|
|
|
|
|
|
|
|
|
● завершения работы. |
ПУСКОВОЙ РЕЖИМ |
|
следующим образом: ось перемещения |
||||
|
|
Права управления краном распреде |
Пусковой режим предназначен для |
моста крана – ось X, ось перемещения |
|||||
|
|
лены по двум группам, которые за |
выполнения ряда обязательных опера |
тележки крана – ось Y, ось вертикаль |
|||||
|
|
креплены за администратором и опе |
ций перед началом работы системы |
ного перемещения крюковой подвески |
|||||
|
|
ратором. Оператор обладает ограни |
после включения питания: включение |
крана – ось Z. |
|
|
|||
|
|
ченными правами и может управлять |
света по секциям, подача питания на |
При успешном окончании пускового |
|||||
|
|
краном только в полуавтоматическом |
приводы, позиционирование крана в |
режима осуществляется переход в полу |
|||||
|
|
режиме, выбирая целевые координаты |
нуль позицию. |
|
автоматический режим |
работы. При |
|||
|
|
перемещения крана в виде заранее |
Процесс позиционирования крана в |
возникновении неполадок в процессе |
|||||
|
|
настроенных администратором техно |
нуль позицию необходим для опреде |
выполнения пускового режима опера |
|||||
|
|
логических позиций. Aдминистратор |
ления нулевой координаты оси пере |
тор проводит диагностику неисправнос |
|||||
|
|
обладает полными правами и может |
мещения привода с целью обеспечения |
ти и для устранения неполадок осущес |
|||||
|
|
управлять краном в полуавтоматичес |
возможности управления краном пос |
твляет запуск системы в ручном режиме. |
|||||
|
|
ком и ручном режимах, а также вы |
редством задания абсолютных коорди |
|
|
|
|
||
|
|
полнять изменение текущих настроек |
нат перемещения. Условно оси переме |
РУЧНОЙ РЕЖИМ |
|
|
|||
|
|
ПО. |
щения |
приводов крана |
обозначены |
Ручной |
режим предоставляет ряд |
||
|
|
|
|
|
|
функций управления: |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
● управление краном по осям X и Y по |
|||
|
|
Защищённые ноутбуки |
|
|
|
отдельности путём задания необхо |
|||
|
|
Panasonic – ведущий производитель защи |
димых координат вручную по каж |
||||||
|
|
Panasonic теперь |
щённых ноутбуков. Начиная с 1996 года |
дой оси; |
|
|
|
||
|
|
в программе поставок |
Panasonic самостоятельно осуществляет раз |
● управление подъёмом и опусканием |
|||||
|
|
ПРОСОФТ |
работку |
и производство |
ноутбуков |
крюковой подвески крана по оси Z; |
|||
|
|
ПРОСОФТ и российское представитель |
TOUGHBOOK на собственных заводах в Япо |
● выполнение выхода в нуль позицию |
|||||
|
|
ство японской компании Panasonic заключи |
нии и на Тайване. Ноутбуки Panasonic широко |
отдельно по каждой оси Х и Y; |
|||||
|
|
ли дистрибьюторское соглашение. Заказчи |
применяются для автоматизации работ в по |
● включение питания приводов; |
|||||
|
|
кам ПРОСОФТ теперь доступны защищён |
левых и промышленных условиях по всему |
● задание значений предельно допус |
|||||
|
|
ные ноутбуки Panasonic TOUGHBOOK. Это |
миру: в армиях и службах силовых структур, |
тимых координат по осям X и Y; |
|||||
|
|
семейство ноутбуков и портативных компь |
предприятиях добывающего сектора, строи |
● диагностику неисправностей и со |
|||||
|
|
ютеров производства японской компании, |
тельной отрасли, на транспорте, в машино |
стояний системы при возникнове |
|||||
|
|
предназначенных для эксплуатации в небла |
строении, автомобильной промышленности, |
нии неполадок. |
|
|
|||
|
|
гоприятных для электроники условиях: при |
геологии и т.д. Компания Panasonic предлага |
Окно |
управляющей |
программы |
|||
|
|
низких температурах, под воздействием |
ет широкий модельный ряд защищённых мо |
пульта оператора в ручном режиме |
|||||
|
|
влаги, ударов и вибраций. Присутствие в |
бильных устройств, включающий сверхпор |
представлено на рис. 5. |
|
|
|||
|
|
продуктовом портфеле ПРОСОФТ ноутбуков |
тативные ПК (UMPC), планшетные ноутбуки, |
За диапазон перемещения моста и те |
|||||
|
|
TOUGHBOOK положительно скажется на ка |
а также мощные полноформатные модели. |
лежки крана принимается расстояние |
|||||
70 |
|
честве обработки поступающих клиентских |
На все поставляемые защищённые ноутбуки |
от нулевых координат по осям до пре |
|||||
|
запросов. |
действует фирменная гарантия 3 года. ● |
дельно допустимых координат по соот |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
© СТА-ПРЕСС |
СТА 1/2011 |
|
|
Р А З Р А Б О Т К И /А Т О М Н А Я Э Н Е Р Г Е Т И К А
ветствующим осям. Нулевые координа ты определяются в процессе выхода в нуль позицию. Предельно допустимые координаты по осям X и Y настраивают ся оператором с правами администра тора. Значения предельно допустимых координат определяются габаритными размерами камеры и технологическими особенностями производимых работ.
Управление подъёмом и опусканием крюковой подвески крана по оси Z осуществляется вручную при помощи соответствующих кнопок.
ПОЛУАВТОМАТИЧЕСКИЙ
РЕЖИМ
Полуавтоматический режим пред назначен для управления краном по осям X и Y по заданным фиксирован ным координатам технологических то чек, а также для управления подъёмом и опусканием крюковой подвески кра на по оси Z.
Фиксированные координаты техно логических точек записываются и хра нятся в таблице технологических пози ций. Каждая запись таблицы содержит в себе следующие поля:
●название позиции,
●значение координаты по оси X,
●значение координаты по оси Y.
Для перемещения крана в технологи ческую позицию оператор выбирает необходимую позицию в таблице и вы полняет команду перемещения.
Оператор при наличии прав админи стратора имеет возможность редакти ровать, добавлять и удалять записи в таблице технологических позиций.
Управление подъёмом и опусканием крюковой подвески крана по оси Z и в данном режиме осуществляется вруч ную при помощи соответствующих кнопок.
РЕЖИМ ЗАВЕРШЕНИЯ РАБОТЫ
Режим завершения предназначен для выполнения ряда операций при окончании работы системы перед вы ключением питания: перемещение крана в позицию его нахождения во время отсутствия работ в камере, отк лючение питания приводов, выключе ние света по секциям.
При успешном окончании данного режима пульты оператора автомати чески выключаются.
УНИКАЛЬНЫЕ ОСОБЕННОСТИ
ПРОЕКТА
Уникальность описанной в статье системы управления опытным уни
версальным стендом камерой опреде ляется следующими её особенностя ми:
●система является опытно конструк торской разработкой;
●система разработана с учётом специ фики технологического процесса производства гранулированного МОКС топлива для реактора БН 800;
●используемые в системе программ но технические средства доработаны специалистами ООО «НПП «АИС» самостоятельно либо совместно с производителями программно тех
нических средств в соответствии с условиями реализации задачи и тре бованиями заказчика.
Отдельно следует отметить такую особенность системы, как её высокую эксплуатационную эргономичность. Интерфейс управляющей программы пульта оператора разрабатывался в стремлении сделать его максимально удобным и, по признанию эксплуати рующего персонала, получился доста точно простым и понятным, что сни жает вероятность ошибок при работе оператора. ●
E mail: shustova ms@mail.ru
71
СТА 1/2011 |
© СТА-ПРЕСС |
www.cta.ru |
|
|