

Разел II.Обоснование системы регулирования электропривода насоса по схеме пч-ад
2.1 Анализ существующих методов регулирования
Выше было сказано о том что производительность необходимая потребителю меняется в разное время суток и что в связи с этим желательно менять производительность НУ.
Процесс изменения характеристики сети или насоса для обеспечения заданной величины подачи называется регулированием. Известные методы регулирования производительности насосных агрегатов можно условно разделить на две достаточно обширные группы:
а) Регулирование при постоянной скорости вращения рабочего колеса насоса, включающее:
- дросселирование задвижкой на стороне всасывания;
- впуск во всасывающую трубу воздуха;
- регулирование поворотом направляющих лопаток;
- дросселирование напорной задвижкой;
б) Регулирование при переменной скорости вращения рабочего колеса насоса:
- с использованием электромагнитных муфт скольжения (без изменения скорости вращения приводного двигателя);
- с использованием асинхронного электропривода с питанием от источника переменной частоты;
- с использованием каскадных схем асинхронного привода;
Если насосы работают совместно, то регулирование может осуществляться несколькими способами:
- дросселированием на одном из работающих насосов;
- дросселированием на общем напорном водоводе или одновременно у всех параллельно работающих насосов;
- регулированием скорости вращения одного из параллельно работающих насосов;
- одновременным регулированием скорости всех параллельно работающих насосов.
В действующих насосных станциях наиболее широкое применение нашло регулирование дросселированием на общем напорном коллекторе путём воздействия диспетчером на управляющие цепи исполнительных механизмов (приводы задвижек).
Дроссельное регулирование (рис 2.1). Дросселирование осуществляется задвижкой, расположенной на напорной линии насоса. Задвижка необходима для отсоединения насоса от сети в период остановки или ремонта. Поэтому дроссельное регулирование не требует внесения в систему установки насоса никаких новых элементов, что является основным достоинством этого способа. Каждому положению дроссельной задвижкой соответствует новая характеристика сети.

Рисунок 2.1 – Регулирование производительности насоса дросселированием
Недостаток заключается в том, что к. п. д. насосной установки ввиду дополнительных потерь напора в прикрытой задвижке понижается. Регулировать подачу насоса задвижкой на всасывающем трубопроводе не рекомендуется, так как к указанному выше недостатку такого регулирования в этом случае добавляется еще большее снижение к. п. д. вследствие ухудшения всасывающей способности, выделения паров жидкости и возможной кавитации.
Более рациональным является регулирование изменением частоты вращения насоса, так как при этом к. п. д. выше и резко снижается потребляемая мощность. Чаще всего центробежные насосы устанавливаются на одном валу с электродвигателем. Поэтому изменение частоты вращения насоса связано с изменением частоты вращения электродвигателя.
На
рисунке 2.2 показано положение напорных
характеристик при регулировании подачи
изменением частоты оборотов рабочего
колеса насоса
![]()

Рисунок 2.2 – Регулирование производительности насоса изменением частоты оборотов
Поскольку положение задвижки остается неизменным, суммарное сопротивление трубопровода не изменяется и положение его характеристик будет прежним. При изменении частоты оборотов рабочего колеса точка рабочего режима А перемещается за характеристикой Q-H, подача и напор уменьшатся. Изменять частоту оборотов имеет смысл только до определённой величины при которой напор турбомеханизма станет равным статическому напору. При дальнейшем понижении продуктивности напора развиваемого турбомеханизмом будет недостаточно, чтобы преодолеть статический напор в сети. Мощность и к.п.д могут быть определены из кривых мощностей и к.п.д за имеющимися значениями QА, QВ.
2.2. Анализ системы регулированного привода
В большинстве промышленных механизмов, в том числе и НУ для достижения высокой производительности электропривода и требуемого качества его работы необходимо осуществлять регулирование скорости.Регулированием скорости называется принудительное изменение скорости электропривода в зависимости от требований технологического процесса. Регулирование скорости осуществляется дополнительным воздействием на приводной двигатель; оно может быть произведено человеком или специальным автоматическим устройством.
Наибольшее распространение получили следующие способы регулирования угловой скорости асинхронного двигателя: 1) реостатное регулирование; 2) переключением числа полюсов; 3) изменением частоты питающего напряжения; 4) каскадным включением асинхронного двигателя с другими машинами или преобразователями. Для регулирования угловой скорости, кроме упомянутых, могут быть использованы некоторые другие способы включения электрических двигателей: импульсное регулирование, регулирование изменением подводимого к статору напряжения, регулирование с помощью электромагнитной муфты скольжения и др.
а) реостатное регулирование;
Введение резисторов в цепь ротора (реостатное регулирование) позволяет, регулировать угловую скорость двигателя. Плавность регулирования зависит от числа ступеней включаемых резисторов. Регулирование осуществляется вниз от основной угловой скорости.Реостатные характеристики асинхронного двигателя, как и в приводе постоянного тока, отличаются невысокой жесткостью, уменьшающейся с ростом сопротивления резисторов в роторной цепи.
Допустимый диапазон при реостатном регулировании угловой скорости не превышает (1,5 ~ 2) : 1. В условиях эксплуатации напряжение питающей сети также может изменяться относительно номинального значения. Его снижение приведет к уменьшению модуля жесткости характеристики и к еще большему уменьшению диапазона регулирования.При вентиляторной нагрузке может быть допущен больший диапазон регулирования, примерно (3 ~ 5) :1.Плавность регулирования тем выше, чем больше число ступеней регулировочного резистора.
Допустимая нагрузка длительно работающего двигателя при реостатном регулировании определяется неизменным моментом, равным номинальному, так как номинальному моменту соответствует номинальный ток двигателя.
Допустимый ток и соответственно допустимый момент двигателя должен быть снижен по сравнению с номинальным тем в большей мере, чем ниже его угловая скорость.
Допустимый момент асинхронных двигателей с фазным ротором уменьшается по мере снижения угловой скорости примерно до 0,4Мном в соответствии с равенством
 (6)
(6)
Потери мощности при реостатном регулировании складываются из переменных потерь, включающих потери в меди статора и ротора и во внешних резисторах роторной цепи, и постоянных — не зависящих от нагрузки. При неизменном моменте нагрузки и реостатном управлении потери мощности в роторной цепи изменяются пропорционально скольжению, а потери в статоре не зависят от скольжения и остаются неизменными при данном моменте нагрузки. Основная мощность теряется в регулировочном резисторе.
Недостатками реостатного регулирования скорости являются:
1) необходимость дискретного изменения сопротивления в роторной цепи с помощью силовых аппаратов, управляемых дистанционно или вручную, что дает ступенчатое регулирование скорости и исключает возможность использования замкнутых систем автоматического управления;
2) невысокое быстродействие;
3) большие потери энергии.
В настоящее время наблюдается тенденция к уменьшению использования рассмотренного вида регулирования скорости по причине его недостатков по сравнению с другими имеющимися методами регулирования.
б) Регулирование изменением напряжения ;
Если регулировать напряжение, подводимое к трем фазам статора асинхронного двигателя, то можно, отвлекаясь от влияния параметров регулирующего устройства на характеристики двигателя, изменять максимальный момент, не изменяя критического скольжения. Устройством для регулирования напряжения может быть, например, тиристорный регулятор (ТРН). ТРН является устройством, преобразующим напряжение питающей сети в регулируемое напряжение той же частоты. В связи с большими потерями скольжения в асинхронных приводах, ТРН в основном применяется для управления двигателями с фазным ротором. Использование ТРН в электроприводах асинхронных двигателей с короткозамкнутым ротором возможно только для формирования пуско-тормозных режимов.
Регулирование угловой скорости двигателя при этом способе происходит за счет уменьшения модуля жесткости механических характеристик и осуществляется вниз от номинальной угловой скорости. Плавность регулирования определяется плавностью изменения напряжения. При применении тиристорного регулятора напряжения угловая скорость регулируется бесступенчато.Механические характеристики двигателя с короткозамкнутым ротором при регулировании напряжения па статоре приведены на рис. 2.3.

Рисунок 2.3 - Механические характеристики АД прирегулировании напряжения на статоре.
Из этих характеристик следует, что пределы регулирования весьма ограничены даже при использовании вентиляторной нагрузки, но они могут быть существенно расширены в замкнутых системах электропривода. В действительности вследствие уменьшения критического скольжения из-за влияния параметров регулирующего устройства пределы регулирования в разомкнутых системах еще уменьшаются.
Так как большие потери мощности скольжения в двигателе с короткозамкнутым ротором выделяются в самом роторе, то допустимый момент резко уменьшается по мере роста скольжения, поэтому такой неэкономичный способ регулирования угловой скорости асинхронного двигателя с короткозамкнутым ротором можно использовать только при малой мощности двигателя и в кратковременном режиме работы.
Потери энергии в приводе получаются примерно такими же или несколько больше, как и при реостатном регулировании; потери мощности скольжения в основном выносятся из двигателя и выделяются в дополнительном резисторе, что увеличивает допустимый момент. Этот способ может быть использован при вентиляторной нагрузке для продолжительного режима, а при Мс = const для кратковременного режима работы.
В) Регулирование угловой скорости переключением числа полюсов
Из выражения для угловой скорости асинхронного двигателя:
![]() (7)
(7)
следует, что угловую скорость можно регулировать, изменяя число пар полюсов р, если задана частота питающей сети f1 и мало изменяется скольжение s. Так как число пар полюсов может быть только целым числом, то регулирование угловой скорости оказывается ступенчатым. Такой способ регулирования реализуется практически в двигателях с короткозамкнутым ротором, где переключение полюсов производится в обмотке статора, обмотка ротора при этом автоматически приспосабливается к избранному числу полюсов. Принципиальные схемы присоединения полуобмоток для изменения числа полюсов в обмотках с соотношением 2 : 1 приведены на рис. 2.4 (а—в).

Рисунок 2.4 - Принципиальные схемы присоединения полуобмоток для изменения числа полюсов в обмотках с соотношением 2 : 1
На рис. 2.5 (а—д) даны наиболее употребительные схемы переключения обмоток статора. При переключении с одного числа полюсов на другое сохраняется то же направление вращения двигателя. Согласно рис.2.5 (а—д) одинарное число полюсов обозначено /, а двойное число полюсов — //.
 а)
а) б)
б)
 в)
в) г)
г)
 д)
д)
Рисунок 2.5 – Наиболее употребляемые схемы переключения обмоток статора
На рисунке 2.6 для схемы изображенной на рис 2.5 а) приведены примерные механические характеристики которые могут быть использованы в приводах с вентиляторной нагрузкой .
Если применяется схема переключения, отвечающая рис. 2.5 б) или в), то в этом случае номинальные моменты, развиваемые двигателем при двойном и одинарном числах полюсов, примерно одинаковы, а его механические характеристики имеют вид, показанный на рис. 2.7.

Рисунок 2.6 – Механические характеристики для схемы а) (рис.2.5) в приводах с вентиляторным моментом нагрузки
Переключение обмоток статора по схемам, изображенным на рис. 2.5, г) и д), дает возможность получить момент, вдвое больший при двойном числе полюсов по сравнению с одинарным. Это означает, что с уменьшением номинальной угловой скорости в 2 раза соответственно возрастает номинальный момент (рис. 2.8).

Рисунок 2.7 - Механические характеристики для схем рис.2.5 б) и в)

Рисунок 2.8 – Механические характеристики для схем рис 2.5 г) и д)
Точность регулирования определяется статизмом на данной характеристике и оценивается скольжением, которое в среднем составляет: для многоскоростных двигателей малой мощности — 0,05, средней мощности — 0,03, т. е. точность оказывается сравнительно высокой.
Диапазон регулирования практически не превышает 6 : 1 (3000 : 500 об/мин).
Направление регулирования при этом способе является условным и зависит от того, при каком числе полюсов угловая скорость для механизма принята номинальной. Так, для вентиляторной нагрузки и характеристик на рис. 2.5 регулирование осуществляется вниз от основной, а при постоянстве мощности нагрузки и характеристиках по рис. 2.8 — вверх от основной.
Регулирование угловой скорости переключением полюсов является не плавным, а ступенчатым. Вместе с тем рассматриваемый, способ регулирования является весьма экономичным и отличается механическими характеристиками, обладающими большой жесткостью. Благодаря своим преимуществам двигатели с переключением полюсов находят применение там, где не требуется плавного регулирования скорости, например в некоторых металлорежущих станках в целях уменьшения количества механических передач.
г) регулирование скорости в каскадных системах;
Каскадные электроприводы с асинхронными двигателями с фазным ротором (с КЗ ротором не используется в данных системах) целесообразно применять в установках средней и большой мощности, работающих в продолжительном режиме при относительно небольших диапазонах регулирования. Каскадные электроприводы позволяют полезно использовать энергию скольжения, повышая при этом эффективность электропривода.
Наиболее простыми схемами вентильных и вентильно-машннных каскадов являются схемы с промежуточным звеном постоянного тока. Принципиальная схема вентильно-машннного электрического каскада с промежуточным звеном постоянного тока приведена на рис. 2.9. Здесь обмотка статора основного асинхронного двигателя М1 присоединена к сети переменного тока промышленной частоты, а роторная обмотка соединена с выпрямительным мостом В. Энергия скольжения, преобразуемая выпрямительным мостом, реализуется двигателем постоянного тока М2. С помощью синхронного генератора G, находящегося на одном валу с двигателем постоянного тока, энергия скольжения за вычетом потерь возвращается в питающую сеть. Регулирование угловой скорости двигателя Ml осуществляется изменением добавочной ЭДС, создаваемой машиной М2 в цепи выпрямленного тока посредством воздействия на ток возбуждения этой машины при помощи R1.

Рисунок 2.9 – Принципиальная схема вентильно-машннного электрического каскада с промежуточным звеном постоянного тока.
При работе каскада в двигательном режиме выпрямленное напряжение ротора должно уравновешивать противо-ЭДС машины постоянного тока, падение напряжения в активных сопротивлениях роторной цени, а также падение напряжения, обусловленное процессом коммутации вентилей. На рис. 2.10 приведены механические характеристики электрического каскада. Полное использование асинхронного двигателя в электрическом каскаде достигается в случае постоянства момента нагрузки на его валу, поэтому вентильно-машинный электрический каскад иногда называют каскадом постоянного момента. При постоянном моменте нагрузки наибольшему напряжению в роторной цепи, обусловленному диапазоном регулирования, соответствует наименьшая угловая скорость асинхронного двигателя и наибольший, равный номинальному, ток нагрузки (при независимой вентиляции).
В случае вентиляторной нагрузки наибольшему току нагрузки соответствует минимальное напряжение. Однако как при регулировании с постоянным моментом, так и при регулировании с вентиляторным моментом установленные мощности преобразовательных агрегатов будут одинаковы.

Рисунок 2.10 – Механические характеристики электрического каскада.
Практический диапазон регулирования угловой скорости не превышает D = 2: 1. Регулирование угловой скорости может осуществляться только вниз, поэтому этот тип каскада относится к приводам, обладающим однозонным регулированием. Плавность регулирования угловой скорости неограниченна, так как она определяется плавностью изменения тока возбуждения машины постоянного тока. Коэффициент полезного действия электропривода при номинальной нагрузке и максимальной угловой скорости каскада составляет примерно 0,82—0,85 (уменьшаясь с уменьшением нагрузки и угловой скорости). Коэффициент мощности собственно каскада при указанных условиях составляет 0,7—0,75 однако можетбыть увеличен за счет перевозбуждения синхронной машины агрегата постоянной скорости.Стабильность угловой скорости определяется жесткостью механических характеристик и существенно выше, чем при реостатном и других видах параметрического и импульсного регулирования, но хуже, чем при частотном управлении.
д) регулирование с помощью силовых полупроводниковых преобразователей;
Силовые полупроводниковые преобразователи в системах электропривода выполняют функцию регулирования скорости и момента электрического двигателя. Они включены между двигателем и основным источником питания.
По принципу действия силовые преобразователи разделяются на следующие базовые типы:
- широтно-импульсные преобразователи (ШИП), связывающие источник постоянного тока с двигателем постоянного тока;
- управляемые выпрямители (УВ), связывающие источник переменного тока с двигателем постоянного тока, частным случаем управляемого выпрямителя является выпрямитель неуправляемый (В);
- автономные инверторы (АИ), связывающие источник постоянного тока с двигателем переменного тока, делятся на инверторы тока и напряжения (АИН и АИТ);
-непосредственные преобразователи частоты (НПЧ), связывающие источник переменного тока с двигателем переменного тока.
ШИП преобразует постоянное напряжение питания (Uirp = const,/j =0) в постоянное регулируемое напряжение на выходе (U2(V =var,f2 = 0).
УВ преобразует переменное, обычно синусоидальное напряжение частоты f= 50 Гц постоянного действующего значения (обычно 220В), в постоянное регулируемое напряжение на выходе (U2cp = var,f2 =0).
АИ преобразует постоянное напряжение питания (U1 — const, f =0) в переменное напряжение на выходе с регулируемым действующим значением и регулируемой частотой (U 2=var, f 2=var).
НПЧ преобразует переменное, обычно синусоидальное, напряжение частоты f1, = 50 Гц постоянного действующего значения (обычно 220 В) в переменное напряжение на выходе с регулируемым действующим значением и регулируемой частотой (U2 =var,f2 =var)..
Так как в данной курсовой работе исследуется достаточно мощный двигатель переменного тока, то не целесообразно рассматривать для него в качестве преобразователя отдельно автономные инверторы. Для двигателей больших мощностей чаще используются сочетания УВ+АИ> либо В+АИ(ПЧ со звеном постоянного тока) либо НПЧ.
2.3 Обоснование выбора системы регулирования привода по схеме ПЧ-АД
Наиболее перспективных и широко используемых в настоящее время способов регулирования скорости АД является частотный способ. Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Частотный способ к тому же отличается и еще одним весьма важным свойством: при регулировании скорости АД не происходит увеличения его скольжения, как это имеет место, например, при реостатном регулировании.
Рассмотрим характеристики основных типов ПЧ.
а) НПЧ ;
НПЧ предназначен для преобразования высокой частоты в низкую и состоит из 18 тиристоров, объединенных во встречно-параллельные группы (рис. 2.11). В основе преобразователя лежит трехфазная нулевая схема выпрямления; каждая фаза преобразователя состоит из двух таких встречно включенных выпрямителей.
НПЧ различают с раздельным и совмесным управлением.
При раздельном управлении управляющие импульсы должны подаваться на тиристоры одной из вентильных групп в соответствии с направлением тока в нагрузке. Для обеспечения раздельной работы применяется специальное логическое устройство, исключающее возможность прохождения тока в одкой группе в то время, когда ток проходит в другой группе.
В преобразователях с совместной работой вентильных групп необходимо включение дополнительных реакторов, ограничивающих уравнительный ток между вентилями каждой группы, а углы управления положительной и отрицательной групп изменяются по определенному закону, исключающему появление постоянной составляющей уравнительного тока. Преобразователи с совместным управлением работой вентильных групп обладают большой установленной мощностью силовых элементов.
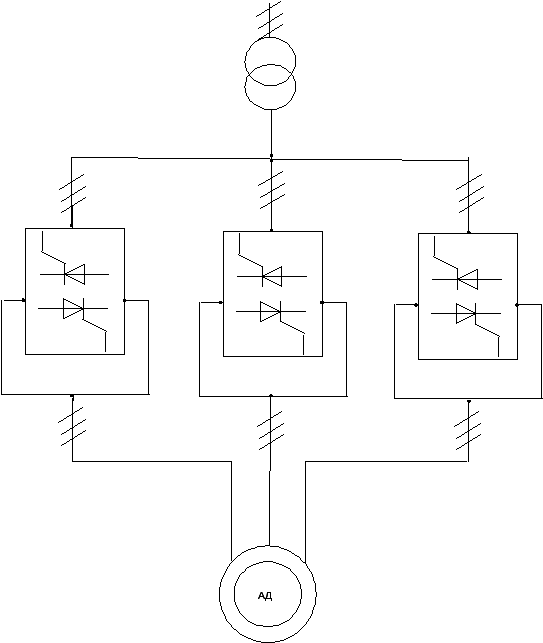
Рисунок 2.11 – ПЧ с непосредственной связью
Для получения выходного напряжения, близкого по форме к синусоидальному, необходимо изменять угол включения вентилей таким образом, чтобы среднее за полупериод питающей сети значение напряжения изменялось в течение полупериода выходного напряжения по синусоидальному закону. Регулирование частоты и напряжения на выходе преобразователя достигается изменением угла включения вентилей (рис2.12).

Рисунок 2.12 – График выходного напряжения НП
К достоинствам этого типа преобразователей можно отнести:
1) однократное преобразование энергии и, следовательно, высокий КПД (около 0,97—0,98);
2) возможность независимого регулирования амплитуды напряжения на выходе от частоты;
3) свободный обмен реактивной и активной энергией из сети к двигателю и обратно
4) отсутствие коммутирующих конденсаторов, так как коммутация тиристоров производится естественным путем (напряжением сети).
К недостаткам рассмотренного ПЧ относятся:
1) ограниченное регулирование выходной частоты (от 0 до 40 % частоты сети);
2) сравнительно большое число силовых вентилей и сложная схема управления ими;
3) невысокий коэффициент мощности — максимальное значение на входе преобразователя около 0,8.
б) ПЧ со звеном постоянного тока ;
Нaиболее широкое применение в современных чaстотно регулируемых приводaх нaходят преобрaзовaтели с явно вырaженным звеном постоянного токa, принципиальная схема которого приведена на рис. 2.13. В преобрaзовaтелях этого клaссa используется двойное преобрaзовaние электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (УВ), фильтруется фильтром (C), сглaживaется, a затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобрaзовaние энергии приводит к снижению к.п.д. и к некоторому ухудшению мaссогaбaритных покaзaтелей по отношению к преобрaзовaтелям с непосредственной связью.
Преобразователь с промежуточным звеном постоянного тока позволяет регулировать частоту как вверх, так и вниз от частоты питающей сети; он отличается высоким КПД (около 0,96), значительным быстродействием, сранительно малыми габаритами и надежностью.

Рисунок 2.13 – Принципиальная схема ПЧ со звеном постоянного тока.
СФ – сетевой фильтр для отсечения высших гармоник; В – выпрямитель, обычно не регулируемый (в ПЧ первого покаления) для регулирования напряжения в звене постоянного тока; ДН и ДТ – датчики напряжения и тока; ТК – тормозни ключ; АИ – автономный инвертор, обычно ШИМ (рис2.14); МФ – мотор-фильтр, уменьшение высших гармоник на двигатель; СУ – система управления.

Рисунок 2.14 – Принципиальная схема силовой АИ
В качестве запираемых ключем в АИ могут использоватьсяGTO тиристоры или IGBTтранзисторы. В данной курсовой работе рассматривается схема на транзисторах исходя из ниже следующих соображений.
Тиристор является полуупрaвляемым прибором: для его включения достaточно подaть короткий импульс нa упрaвляющий вывод, но для выключения необходимо либо приложить к нему обрaтное нaпряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобрaзовaтеле чaстоты требуется сложнaя и громоздкaя системa упрaвления.
Биполярные трaнзисторы с изолировaнным зaтвором IGBT отличaют от тиристоров полнaя упрaвляемость, простaя неэнергоемкaя системa упрaвления, сaмaя высокaя рaбочaя чaстотa.
Вследствие этого преобрaзовaтели чaстоты нa IGBT позволяют рaсширить диaпaзон упрaвления скорости врaщения двигaтеля, повысить быстродействие приводa в целом.
Применение IGBT с более высокой чaстотой переключения в совокупности с микропроцессорной системой упрaвления в преобрaзовaтелях чaстоты снижaет уровень высших гaрмоник, хaрaктерных для тиристорных преобрaзовaтелей. Кaк следствие - меньшие добaвочные потери в обмоткaх и мaгнитопроводе электродвигaтеля, уменьшение нaгревa электрической мaшины, снижение пульсaций моментa и исключение тaк нaзывaемого «шaгaния» роторa в облaсти мaлых чaстот. Снижaются потери в трaнсформaторaх, конденсaторных бaтaреях, увеличивaется их срок службы и изоляции проводов, уменьшaются количество ложных срaбaтывaний устройств зaщиты и погрешности индукционных измерительных приборов.
Изменением периода подачи управляючих импульсов на силовые ключи достигается изменение частоты напряжения подваемого на двигатель (рис 2.15).

Рисунок 2.15 – Алгоритм подачи импульсов на транзисторы
При таком алгоритме в любой момент времени работают три силовых ключа (VT1,VT4,VT6)
Для работы двигателя необходимо с изменением частоты изменять и напряжение. Для этого его изменяют в звене постоянного тока либо используют ШИМ. При выборе соотношений между частотой и напряжением чаще всего исходят их условий сохранения перегрузочной способности.
Выбор преобразователя частоты производим исходя из условий:
![]() ;(8)
;(8)
![]() ;(9)
;(9)
Условиям (8) и (9) удовлетворяет преобразователь частоты Tmdrive MV фирмыMitsubishi-Electric.