

15 Построение пневматической схемы РТК
15.1 Условные обозначения в пневматике
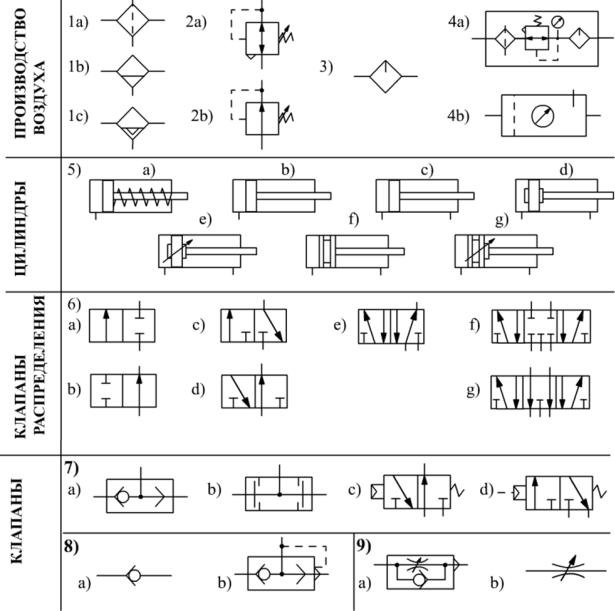
Рисунок 15.1 – Конструкции и функциональные характеристики компонентов пневматики
Подготовка воздуха:
Схема 1 (Рисунок 15.1) – фильтр
a)Общее обозначение.
b)С ручным спуском конденсата.
c)С автоматическим спуском конденсата.
Схема 2 (Рисунок 15.1) – регулятор давления
a) С отверстием для сброса избытка воздуха (обратите внимание, что маленький треугольник указывает направление выхода лишнего воздуха в атмосферу). Линия с двумя стрелками показывает направление основного потока к пользователю и направление выхода избыточного воздуха.
b) Без отверстия для сброса воздуха.
102
В обоих случаях, внешняя штриховая линия должна быть подключена со стороны более низкого давления регулятора.
Схема 3 (Рисунок 15.1) – маслораспылитель (лубрикатор) общее обозначение. Схема 4 (Рисунок 15.1) – блок подготовки воздуха
a)Обозначение с детализацией элементов.
b)Упрощенное обозначение.
Схема 5 (Рисунок 15.1)– цилиндры
a)Цилиндр одностороннего действия – пружинный возврат.
b)Цилиндр одностороннего действия – обратный ход поршня иным способом.
c)Цилиндр двустороннего действия – (заметьте, отличие между b и с в наличии двух каналов подачи давления).
d)Цилиндр двустороннего действия с нерегулируемым торможением в конце хода с двух сторон.
e)Цилиндр двустороннего действия с регулируемым демпфированием в конце хода с двух сторон. Если демпфирование только с одной стороны, то небольшой прямоугольник около поршня изображается только с одной стороны.
f)Цилиндр двустороннего действия без демпфирования с магнитным кольцом на поршне.
g)Цилиндр двустороннего действия с магнитным кольцом на поршне и с регулируемым демпфированием в прямом направлении.
Схема 6 (Рисунок 15.1) – распределители
a)2/2 распределитель в выключенном положении закрыт (нормально закрытый).
b)2/2 распределитель нормально открытый.
c)3/2 распределитель нормально закрытый (Н. З.).
d)3/2 распределитель нормально открытый (Н.О.)
e)5/2 распределитель.
f)5/3 распределитель с закрытым центром в среднем положении.
g)5/3 распределитель с открытым центром в среднем положении.
Схема 7 (Рисунок 15.1) – логические клапаны
a)Клапан выбора – функция "ИЛИ".
b)Клапан с двумя входами – функция "И".
c)Клапан Отрицания – функция "НЕ".
d)Клапан Тождества – функция "ДА".
Схема 8 (Рисунок 15.1) – автоматические распределители
a)Обратный клапан, без пружины.
b)Клапан быстрого выхлопа.
Небольшой треугольник показывает выхлопное отверстие. Пунктирная линия указывает направление потока выхлопа.
Схема 9 (Рисунок 15.1) – клапаны управления потоком
a)Однонаправленное регулирование потока (дроссель с обратным клапаном).
b)Двунаправленное регулирование потока.
15.2 Правила выполнения схем
Вычерчивание пневматической системы подобно вычерчиванию электрической схемы или деталей механической конструкции. Это – стандартная комбинация из линий и условных обозначений, которая позволяет:
–исследовать лучшую последовательность системы.
–составить однозначную инструкцию для специалистов от проектировщика до сборщика. Чтобы создать схему, необходимо разместить заданные элементы и осуществить соединение
между ними. Кроме этого необходимо обратить внимание, что большая часть условных графических обозначений на схемах должны соответствовать ГОСТам стран, для которых предназначена проектируемая система.
Схема 1a (Рисунок 15.2) – Показывает непосредственное подключение распределителя к источнику давления.
103
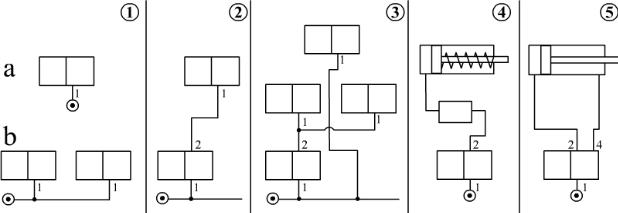
Схема 1b (Рисунок 15.2) – Показывает клапаны, присоединенные к трубопроводу с основным источником давления. Распределение по схеме.
Сплошная линия используется для обозначения трубопроводов "РАБОТА" или "ДАВЛЕНИЕ", а пунктирная линия для обозначения трубопроводов "КОНТРОЛЬНЫЙ СИГНАЛ" или "УПРАВЛЕНИЕ".
При соединении элементов по схеме необходимо по возможности избегать пересечения линий. Где это невозможно, желательно прервать одну из двух линий и изобразить это в виде небольшой дуги, чтобы показать пересечение труб (см. схема 3, рисунок 15.1). Там, где соединения имеются, они выделяются небольшим темным кружком.
Рисунок 15.2 – Типовые схемы исполнений трубопроводов
Трубопроводы изображаются сплошной линией в следующих случаях:
Соединение входного отверстия Р управляющего распределителя непосредственно с источником давления (схема 1а и 1b, рисунок 15.2).
Присоединение выходного отверстия А управляющего распределителя непосредственно к входу другого распределителя (схема 2 и 3, рисунок 15.2).
Соединение цилиндра с распределителем давления через дополнительные элементы, такие как дроссель или клапан быстрого выхлопа (схема 4 и 5, рисунок 15.2).
Схема всегда должна показывать положение "Старт" – исходное положение оборудования при наличии давления. Все элементы, такие как цилиндры и распределители, должны изображаться в позиции, которая предшествует следующей выполняемой функции. Цилиндры могут быть изображены в выдвинутом положении или положении отвода, в зависимости от требуемого начального движения. Две эти ситуации будут различаться положением штока.
Распределители с механическим или пилотным управлением могут быть изображены как в состоянии "Включено", так и состоянии "Выключено" в виде двух небольших квадратов, соответствующего условного обозначения, отображая одно или другое состояние.
Далее приведены правила их использования:
104
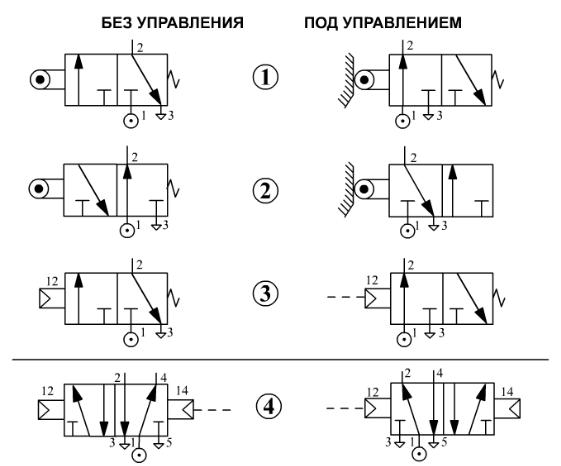
Рисунок 15.3 – Правила использования распределителей
Схема 1 и 2 (Рисунок 15.3) – 3/2 распределители нормально закрытые (N.C. – Н.З) и нормально открытые (N.O. – Н.О.) с механическим включением и пружинным возвратом.
Положение I Выключенное состояние. Внешние соединения показаны на небольшом квадрате рядом с пружинкой, в соответствии с буквами. Реализуются следующие функции:
Для Н.З. "А" (2) с "R" (3) Для Н.О. "Р" (1) с "А" (2).
Положение II Включенное состояние. Внешние соединения и буквы показаны у квадрата с обозначением принципа включения. Линии внутри квадрата показывают новое положение золотника распределителя. В этом случае соединение следующее:
Для Н.З. "Р" (1) с "А" (2). Для Н.О. "Р" (1) с "R" (3).
Схема 3 (Рисунок 15.3) – 3/2 распределитель Н.З. с пилотным включением и пружинным возвратом.
Пневматический сигнал поступает к "пилоту" распределителя по трубопроводу, соединенному, например, с дистанционно расположенным распределителем.
Положение I Выключенное состояние (т.е. нет сигнала на пилоте). Соединения и буквы (цифры) на маленьком квадратике рядом с пружинкой.
Положение II Включенное состояние (т.е. сигнал подан на пилот). Соединения на маленьком квадратике рядом с пилотом.
Схема 4 (Рисунок 15.3) – 5/2 распределитель с двухсторонним пилотным управлением. Сигналы управления поступают на входы распределителя, используя две различные
пилотные линии. Один из двух выходов А (2) или В (4) всегда соединен с питанием Р (1), в зависимости от того на какой пилот сигнал управления подавался последним.
Обозначения изображаются так, чтобы показать соединения и буквы (цифры) над маленьким квадратиком пилота, на который последним приходил сигнал.
105