

Шины.PCI,.USB.и.FireWire
.pdfпорог заполнения выбирается исходя из максимально допустимого расхождения частот и максимальной длины передаваемого пакета.
Питание от шины
Для питания узлов постоянным током в кабелях IEEE 1394 предусмотрена отдель$ ная пара проводов — VG (общий провод, GND) и VP (положительный полюс пита$ ния) с напряжением 8–40 В при токе до 1,5 А. В 1394a диапазон напряжений су$ жен до 8–33 В. Узлы могут быть источниками, потребителями питания или не пользоваться питанием от шины; их отношение к питанию сообщается в поле pwr пакета самоидентификации (см. главу 23). В узлах$повторителях линии питания всех портов объединены. Узлы$источники питания подают напряжения на линию питания через ограничитель тока и диод, так что мощность, подаваемая от несколь$ ких узлов, суммируется. При подключении узел сначала может потреблять от шины не более 1 Вт (1394a — 3 Вт), при этом обязательно должен быть включен уровень PHY. Уровни LINK и выше, как и прикладная часть устройства, могут потреблять дополнительную мощность, заявленную в поле pwr. Однако эти уровни будут вклю$ чаться только по команде от диспетчера шины или диспетчера изохронных ресур$ сов. Каждый узел контролирует питание от шины: при напряжении выше 7,5 В он устанавливает бит PS (power status), сообщаемый в пакете самоидентификации. При падении уровня напряжения ниже 7,5 В физический уровень должен обну$ лить бит PS и уведомить об этом событии управляющее ПО.
Понятие классов питания (Power Class) относится к питанию узлов от кабельной шины IEEE 1394. Класс питания узла сообщается им в поле pwr пакета самоиден$ тификации. В соответствии с классом питания возможны следующие конфигура$ ции узла:
узел с автономным питанием (Self$Power), для которого возможно несколько вариантов:
однопортовый узел не питается от шины и не подает питание сам (pwr = 0);
многопортовый узел не питается от шины, не транслирует питание с других портов и не подает питание сам (pwr = 0);
многопортовый узел не питается от шины, но транслирует питание с других портов (pwr = 4);
поставщик питания (Power Provider, pwr = 1, 2 или 3) — узел питается самосто$ ятельно и подает на шину питание с указанием минимальной мощности;
альтернативный поставщик питания (Alternate Power Provider, pwr = 4) — узел может питаться от шины, а также может поставлять питание;
потребитель (Power Consumer, pwr = 5, 6 или 7) — узел (только однопортовый) питается от шины. До завершения конфигурирования мощность потребляет только PHY (не более 1 или 3 Вт). Верхние уровни (LINK и выше), требующие дополнительной мощности, узел включает только по команде от диспетчера.

Характеристики классов питания приведены в табл. 22.6. В 1394a и 1394b пара$ метры потребления несколько отличаются от первоначальных определений 1394– 1995 и зарезервирован класс 5. Для класса 4 поставляемая мощность указывается в памяти конфигурации узла.
Таблица 22.6. Классы питания
Клас (pwr) |
Поставляет, Вт |
Потребляет, Вт (1394–1995) |
Потребляет, Вт (1394a, b) |
||
|
|
PHY |
LINK |
PHY |
LINK |
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
1 |
15 |
0 |
0 |
0 |
0 |
2 |
30 |
0 |
0 |
0 |
0 |
3 |
45 |
0 |
0 |
0 |
0 |
4 |
01 |
1 |
0 |
3 |
0 |
5 |
0 |
1 |
2 |
Резерв |
Резерв |
6 |
0 |
1 |
5 |
3 |
3 |
7 |
0 |
1 |
9 |
3 |
7 |
|
|
|
|
|
|
1 Для класса 4 поставляемая мощность указывается в памяти конфигурации узла.
Каждой конфигурации соответствует своя схема соединения линий питания пор$ тов, собственного PHY и внутреннего (батарейного или сетевого) источника пита$ ния. Обобщенная схема питания узла приведена на рис. 22.9, для каждой из выше$ приведенных конфигураций на схеме будут отсутствовать те или иные элементы. Общие идеи следующие:
для многопортового узла следует предусмотреть питание PHY$уровня до по$ следней возможности — это обеспечивает целостность шины (отключение пи$ тания PHY сегментирует шину, поскольку узел не сможет транслировать сиг$ налы и трафик). Питание на PHY может подаваться и от кабеля, и от внутреннего источника (через диоды);
поставщик питания должен подавать питание на каждый порт через индивиду$ альные разделительные диоды и ограничители тока (рис. 22.9, а). При этом каж$ дый порт представляет отдельный домен питания (Power Domain);
альтернативный поставщик, обеспечивающий напряжение ниже 20 В, может и не обеспечивать разделения доменов (но индивидуальные ограничители тока обя$ зательны);
узел с автономным питанием, транслирующий питание, при числе портов бо$ лее двух должен иметь ограничители тока на каждый порт.
На рисунке в качестве ограничителей тока условно изображены плавкие предох$ ранители. Реально, конечно же, используются или электронные ограничители, или самовосстанавливающиеся полупроводниковые предохранители.
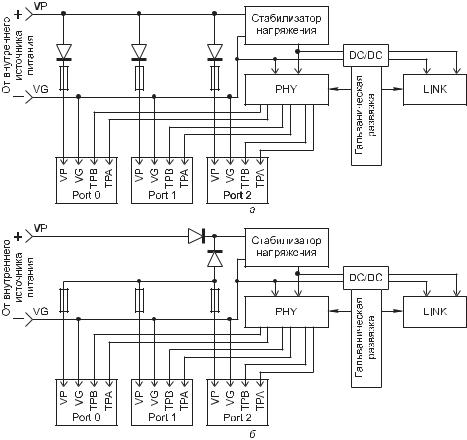
Рис. 22.9. Схема подачи питания от шины: а — узел поставщик питания; б — узел потребитель питания
Гальваническая развязка
Возможность гальванической развязки узлов шины IEEE 1394 позволяет решить ряд проблем, связанных с объединением «схемных земель» соединяемых устройств.
Ваудиотехнике из$за наводок в контуре заземления возникают помехи, неприем$ лемые для работы высококачественной аппаратуры, на которую и ориентирована шина.
Впервых спецификациях, в которых используется только DS$сигнализация, гальваническая развязка возможна только в интерфейсе PHY$LINK. Этот парал$ лельный интерфейс содержит значительное число сигнальных цепей, по которым передаются сигналы с уровнями логики КМОП или ТТЛ. Большая часть этих сиг$ налов имеет весьма высокую частоту переключения (около 50 МГц), что не позво$

ляет применить дешевую оптронную развязку1. Оптроны удобно применять толь$ ко для медленных сигналов LinkOn и LPS. Кроме того, ряд сигнальных цепей ис$ пользуется для двунаправленной передачи, что осложняет схему развязки. Самый простой и дешевый способ развязки — введение разделительных конденсаторов. Однако при этом развязка осуществляется только по постоянному току (типичное напряжение развязки до 60 В); высокочастотные помехи, вызывающие пульсации на общем проводе, будут воздействовать на интерфейс. Полную развязку обеспе$ чивают только импульсные трансформаторы (1:1), устанавливаемые в каждой цепи; при этом достижимо напряжение изоляции развязки до 500 В. Однако это слиш$ ком дорогой и громоздкий вариант, который используется редко. И конденсаторы, и трансформаторы фактически выполняют дифференцирование сигналов (пере$
Рис. 22.10. Гальваническая развязка цепей интерфейса PHY LINK: а — схема развязки по IEEE 1394; б — развязка сигнальных цепей по IEEE 1394b
1Обычные оптроны слишком инерционны, быстродействующие оптические приемники, применяемые, например, в сетях передачи данных, слишком дороги.
дают только перепады). Специально для этого и LINK, и PHY имеют конфигу$ рирующие сигналы Direct, по которым интерфейсные цепи настраиваются на прием непосредственных сигналов (без развязки) или дифференцированных (с развязкой).
В приложении стандарта IEEE 1394 и в основном тексте IEEE 1394a приводится довольно громоздкая схема конденсаторной развязки (рис. 22.10, а), содержащая большое число резисторов, «подтягивающих» уровни сигналов. В IEEE 1394b при$ ведена более элегантная схема установки привязки состояний входов, использую$ щая КМОП$вентили (повторители) с высокоомной обратной связью (рис. 22.10, б). На рисунках изображены цепи развязки для одной из десяти сигнальных ли$ ний.
Для портов, работающих в бета$режиме (IEEE 1394b), полная гальваническая раз$ вязка стала возможной в цепях сигналов внешнего электрического интерфейса. Параметры этой развязки приводятся в начале данной главы. Использование оп$ товолоконной связи позволяет обеспечить бескомпромиссную развязку с любым требуемым напряжением изоляции.
Гальваническая развязка сигнальных цепей подразумевает и развязку для кабель$ ного питания. Эта развязка осуществляется с помощью импульсных преобразова$ телей напряжения (DC/DC Converter).
Взаимодействие с физическим уровнем шины IEEE 1394
Физический уровень (PHY) обеспечивает LINK$уровню возможность обращения к шине для посылки и приема пакетов и исполнения некоторых служебных дей$ ствий. Физический уровень имеет свои регистры, служащие для управления вы$ полнением функций и определения состояния шины и узлов. К этим регистрам имеется возможность локального доступа — приложение узла через LINK$уровень может общаться с регистрами PHY. Содержимое некоторых регистров может из$ меняться по приему пакетов физического конфигурирования. В 1394a появилась возможность удаленного обращения к регистрам чужого узла на данной шине. Физический уровень не только обеспечивает передачу и прием пакетов для LINK$ уровня, но и сам является источником и получателем служебных пакетов.
Интерфейс с канальным уровнем
Физический и канальный уровни (PHY и LINK) в стандарте IEEE 1394 отделимы друг от друга. Это обеспечивает модульность построения устройств и возможность гальванической развязки основной (прикладной) части устройства от кабельного интерфейса. В устройствах физический и канальный уровни могут реализоваться раздельными микросхемами, причем даже разных производителей. Интерфейс между ними был описан в приложении к стандарту 1394, но в рекомендательной (необязательной) форме. В 1394a этот интерфейс (с небольшими изменениями) объявлен стандартом. Cвязь физического и канального уровней обеспечивается интерфейсом PHY$LINK. По этому интерфейсу канальный уровень получает сер$ висы доступа к шине для передачи и приема пакетов данных, а также доступ к внутренним регистрам PHY.
В IEEE 1394b в связи с особенностями бета$режима подход к организации интер$ фейса связи с физическими портами изменился. Здесь появился новый промежу$ точный интерфейс PIL$FOP, который позволяет соединять микросхему, в кото$

рой LINK интегрирован с однопортовым PHY, с многопортовым разветвителем. Таким образом, в 1394b имеются два варианта интерфейса:
параллельный интерфейс B PHY LINK, являющийся развитием своего традици$ онного предшественника и обеспечивающий работу с портами на скоростях от S100 до S800 как в традиционном, так и в бета$режиме;
последовательный интерфейс PIL FOP, по сигналам соответствующий электри$ ческому интерфейсу порта в бета$режиме, подключающий многопортовый PHY$ разветвитель (называемый FOP) к однопортовому PHY, интегрированному с LINK$уровнем (эта комбинация называется PIL). Последовательный интер$ фейс поддерживает все режимы и скорости (от S100 до S3200).
Интерфейс PHY LINK 1394 и 1394a
Интерфейс PHY–LINK изображен на рис. 23.1, назначение сигналов раскрыто в табл. 23.1. Интерфейс содержит небольшое количество сигналов, и именно для этих сигналов и возможно введение гальванической развязки (см. главу 22).
Рис. 23.1. Интерфейс PHY LINK 1394 и 1394a
На рисунке приведены сигналы для обоих вариантов шины — кабельной и кросс$ шины. Описание интерфейса, приведенное ниже, относится к самому распростра$ ненному варианту — кабельной шине. В этом варианте не используются (отсут$ ствуют) сигналы Clk25 и Bacкlplane.
Для кросс$шины в интерфейсе LINK$PHY сигнал SClk имеет пониженную частоту (24,756 или 12,288 МГц для S50 и S25 соответственно); для идентификации ис$ пользуемой частоты введен сигнал Clk25 (0 — 12,288 МГц, 1 — 24,576 МГц). При$ знаком подключения LINK$уровня к Backplane PHY является дополнительный сигнал Backplane (от PHY к LINK’у). Особенности PHY$уровня Backplane$вариан$ та рассмотрены в главе 22.
Таблица 23.1. Сигналы интерфейса LINK PHY
Сигнал |
Назначение |
D[0:7] |
Двунаправленная шина данных. На S100 используются только линии D[0:1], |
|
на S200 — D[0:3], на S400 — D[0:7] |
|
|

Сигнал |
Назначение |
Ctl[0:1] |
Состояние интерфейса (табл. 23.2) |
LReq |
Link Request, последовательный интерфейс, по которому LINK инициирует |
|
запрос к PHY (для передачи пакетов и обращения к регистрам) |
SClk |
Синхронизация (49,152 МГц) для вышеприведенных сигналов. Источник меняет |
|
состояние сигнала по спаду SClk, приемник фиксирует состояние по фронту SClk |
LPS |
Link Power Status, признак активности (включения) LINK уровня |
LinkOn |
Сигнал для включения LINK уровня |
Direct1 |
Признак непосредственного соединения LINK PHY (нет дифференцирования |
|
сигналов) |
|
|
1 В микросхемах этот вывод может называться «Iso» (изоляция).
Интерфейсом управляет PHY; LINK может посылать запросы только в определен$ ных состояниях интерфейса. Право передачи информации по двунаправленным ли$ ниям данных LINK получает от PHY. Текущее состояние интерфейса (использова$ ние шины данных) определяется сигналами Ctl[0:1] в соответствии с табл. 23.2.
Таблица 23.2. Состояние интерфейса LINK PHY
Ctl[0:1] |
Состояние интерфейса |
|
Линиями Ctl[0:1] управляет PHY: |
00 |
Idle — нет активности (LINK может посылать запрос) |
01Status — PHY по шине данных посылает информацию о событиях или ответ на запрос чтения регистра
10Receive — PHY передает LINK уровню пакет, принимаемый с шины,
или генерируемый им (PHY пакет), или пакет ответа на запрос к регистрам PHY
11Grant — PHY передает LINK’у право использования шины данных
Линиями Ctl[0:1] управляет LINK:
00Idle — нет активности: LINK завершил передачу и отдает управление интерфейсом уровню PHY
01Hold — LINK удерживает шину, готовясь к передаче пакета (или после передачи пакета, собираясь послать следующий без повторного арбитража)
10Transmit — LINK передает данные PHY (для передачи в шину или обращения к регистрам PHY)
11Не используется
В состоянии Status PHY по линиям данных D[0:1] за два такта передает 4 бита со$ стояния (Stat[0:1] в первом такте и Stat[2:3] во втором (табл. 23.3).
Таблица 23.3. Состояние, сообщаемое PHY
Бит Значение
0ARB_RESET_GAP — обнаружение зазора сброса арбитража (указание на начало нового интервала справедливости)
продолжение

Таблица 23.3 (продолжение)
Бит Значение
1SUBACTION_GAP — обнаружение нормального зазора арбитража (можно запрашивать право посылки очередного асинхронного пакета)
2BUS_RESET_START — обнаружение сброса на шине
3PHY_INTERRUPT — прерывание от PHY, причина уточняется чтением PHY регистра 0101b. Возможные события: обнаружение петли во время идентификации дерева; обнаружение снижения питающего напряжения (ниже 7,5 В); обнаружение тайм аута арбитража; обнаружение изменения напряжения смещения
Запросы LINK к PHY
Запрос от LINK к PHY посылается в последовательном виде по линии LReq. За$ прос начинается с единичного старт$бита (LReq0 = 1) и завершается нулевым стоп$ битом (LReq6 в 1394 и LReq7 в 1394a). За старт$битом следует код типа запроса (биты LReq[1:3]), за которым следуют биты тела запроса. Типы запросов, их коды и состояния интерфейса, во время которых LINK их имеет право посылать, приве$ дены в табл. 23.4.
Таблица 23.4. Запросы LINK к PHY
Код запроса |
Назначение |
Состояния, в которых |
LReq[1:3] |
|
допустима подача запроса |
|
|
|
000 |
ImmReq, немедленный запрос (без задержки |
Idle, Receive |
|
арбитража) для передачи пакета квитирования |
|
001 |
IsoReq, запрос изохронной передачи |
Все (и Idle, когда интерфейсом |
|
|
владеет LINK) |
010 |
PriReq, запрос передачи пакетов начала |
Idle, Status |
|
цикла и приоритетных асинхронных пакетов |
|
011 |
FairReq, запрос передачи обычных |
Idle, Status |
|
асинхронных пакетов |
|
100 |
RdReg, запрос чтения регистра PHY |
Все |
101 |
WrReg, запрос записи регистра PHY |
Все |
110 |
Acceleration Control, управление |
Все |
|
ускорением арбитража: LReq[4]= |
|
|
1 — разрешить, 0 — запретить |
|
111 |
Резерв |
|
|
|
|
Запросы на передачу
Тело запросов передачи пакетов содержит код скорости, за который отвечают биты LReq[4:5]; в 1394a он занимает биты LReq[4:6]. Дополнительный бит в запросе 1394a появился ради введения дополнительных скоростей; назначение кодов ско$

рости обеспечивает совместимость запросов 1394 и 1394a (на скоростях S100–S400 бит LReq6=0, он может восприниматься как стоп$бит). Коды скоростей в запросе 1394a приведены далее:
S100 — 000 (00 в 1394); S800 — 110;
S200 — 010 (01 в 1394); S1600 — 001;
S400 — 100 (10 в 1394); S3200 — 011.
Послав запрос на передачу пакета, LINK должен следить за состоянием интерфей$ са (по состоянию сигналов Ctl[1:0]), дожидаясь разрешения передачи пакета — со$ стояния Grant. Это состояние появляется, когда PHY выигрывает арбитраж для данного запроса. Обнаружив состояние Grant, LINK берет на себя управление ин$ терфейсом и шиной, установив на линиях Ctl[1:0] признак состояния Hold. Во время передачи по шине данных пакета LINK устанавливает признак состояния Transmit. Завершив передачу пакета, LINK устанавливает признак состояния Idle, чем отда$ ет управление интерфейсом PHY$уровню. Если LINK посылает подряд несколько пакетов (в соединенных транзакциях или при ускоренном арбитраже), то между пакетами он удерживает интерфейс (и шину), сигнализируя состояние Hold.
Состояния Idle и Status, наблюдаемые LINK’ом после подачи запроса передачи, означают, что запрос обслуживается (LINK должен ждать дальше). Состояние Receive для обычных и приоритетных запросов означает, что запрос отвергнут PHY (LINK его должен повторить позже). Запрос передачи пакета квитирования не отвергается (для него Receive означает ожидание). Запросы изохронных передач отвергаются только в случае получения в состоянии Status уведомления об обна$ ружении нормального зазора арбитража (истекло время, отведенное на изохрон$ ные передачи в данном цикле).
Прием пакетов
Пакеты, принимаемые по шине и предназначаемые данному узлу, PHY передает по шине данных D[0:7] в состоянии Receive. При приеме PHY передает по D[0:7] некоторое количество байтов FFh (признак Data On), байт$индикатор скорости и собственно пакет данных. Признаком конца пакета будет переход интерфейса в состояние Idle. При подсчете CRC$кода LINK учитывает только байты пакета (без индикатора скорости). Байт$индикатор скорости указывает LINK’у, сколько линий D[0:7] будет использоваться при передаче данного пакета. Если LINK не поддерживает данную скорость, он должен игнорировать весь трафик до обнару$ жения состояния Idle. Значение индикатора скорости приведено в табл. 23.5.
Таблица 23.5. Индикация скорости от PHY к LINK
Скорость |
D[0:7] |
Скорость |
D[0:7] |
S100 |
00xxxxxx |
S800 |
01010001 |
S200 |
0100xxxx |
S1600 |
01010010 |
S400 |
01010000 |
S3200 |
01010011 |
|
|
|
|