

6. Неинерциальные системы отсчета. Силы инерции |
31 |
|
ω2 R з |
|
2 |
|
|
1 |
|
2 |
|
|
|
g = g0 1 − |
|
|
cos |
|
ϕ |
= g0 1 − |
|
cos |
|
ϕ . |
(2.14) |
|
|
|
|
|
|||||||
|
|
g0 |
|
|
|
|
290 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
(Заметим, что из-за сплюснутости Земли коэффициент в формуле |
|||||||||||
(2.14) не 1/ 290 , |
а |
1/190 .) |
|
|
|
|
|
|
|
|
|
При движении по Земле со скоростью vG' = 5 км / час на пешехода с |
|||||||||||
массой m = 60 кг |
действует очень малая кориолисова сила. |
Ее макси- |
|||||||||
мальная величина |
F кор = 2mω2vG' ≈ 0, 012 Н. |
Но в летящем со скоро- |
|||||||||
стью v ' =1000 км/ час |
самолете эта сила, толкающая человека вбок, мо- |
||||||||||
|
|
|
|
|
|
жет возрасти до ощутимой величи- |
|||||
|
|
|
|
|
|
ны 2, 4 Н. |
|
|
|||
|
|
|
|
|
|
|
Во время первой мировой вой- |
||||
|
|
|
|
|
|
ны в сражении британского и |
|||||
|
|
|
|
|
|
немецкого флотов у Фолклендских |
|||||
|
|
|
|
|
|
островов все точно пристрелянные |
|||||
|
|
|
|
|
|
пушки английских кораблей стали |
|||||
|
|
|
|
|
|
посылать |
снаряды на |
расстояние |
|||
|
|
|
|
|
|
100 м от цели. Причина была в том, |
|||||
|
|
|
|
|
|
что военные моряки не учли про- |
|||||
|
|
|
|
|
|
стые законы физики. Прицелы бы- |
|||||
Рис.2.14 |
|
|
|
ли выверены у берегов Англии, в |
|||||||
|
|
|
северном полушарии, а Фолкленды |
||||||||
|
|
|
|
|
|
находятся в южном полушарии. Из |
|||||
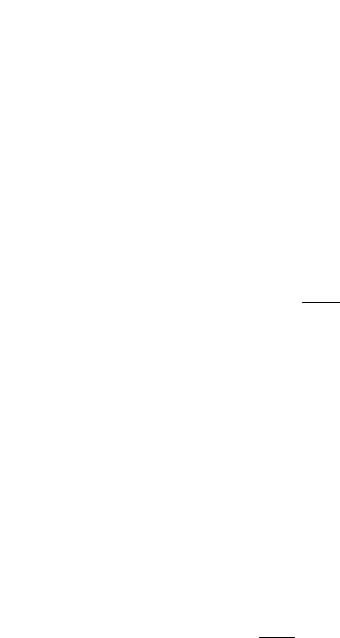
формулы (2.11) и рис.2.14 видно, что сила Кориолиса в разных полушариях отклоняет летящие снаряды в разные стороны.
|
Из того же рисунка видно, что пассаты |
|
|
(ветры, дующие от тропиков к экватору) в |
|
|
обоих полушариях будут отклоняться к запа- |
|
|
ду, а текущие реки будут отклоняться в се- |
|
|
верном полушарии к правому берегу, а в юж- |
|
|
ном – к левому. |
|
|
Рассмотрим еще один пример – враще- |
|
|
ние жидкости в сосуде (рис. 2.15). Уравнение |
|
|
движения (2.8) можно записать для любой |
|
|
"частицы" жидкости – бесконечно малого |
|
|
кубика с поперечным сечением ∆S , который |
|
Рис.2.15 |
вместе с жидкостью вращается с угловой |
|
скоростью ω. Центростремительное ускоре- |
||
|
32 Глава 2. Динамика. Законы Ньютона и их следствия
ние этого кубика создается, главным образом, силами гидростатического давления: ∆mω2r = p '∆S − p∆S =ρg (h'−h)∆S . Отсюда следует, что
h' > h , и поверхность вращающейся жидкости должна принимать форму воронки (рис.2.15). По той же причине поверхность реки в месте поворота будет наклонена в сторону поворота.
Учтем теперь силы вязкого трения. Из-за них жидкость практически не движется вблизи дна сосуда, т.е. с высотой скорость вращения увеличивается. Если перейти в неинерциальную систему отсчета, вращающую-
ся со средней скоростью жидкости ωG , то в этой системе верхние слои
жидкости будут двигаться со скоростью vG' , опережая вращение системы, а нижние слои будут отставать. Кориолисовы силы приведут к появлению поперечных циркулярных потоков (правая часть рис.2.15). Такие потоки собирают чаинки в аккуратную кучку в центре стакана. Эти же потоки будут размывать один из берегов реки в месте ее изгиба и наносить ил на другой, пологий берег.
Глава 3.
Работа и энергия
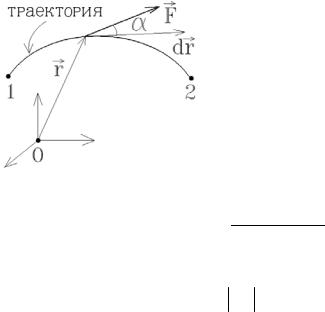
Обычно приходится иметь дело с силой, переменной как по величине, так и по направ-
лению, и действующей на частицу, движущуюся по криволинейнойG траектории. На-
правление силы F составляет с траекторией угол α (вообще говоря, переменныйG ). За вре-
мя dt частица переместится на dr (рис.3.1), и
сила совершит над ней элементарную работу, которая по определению равна скалярному произведению вектора силы на вектор беско-
нечно малого перемещения: |
G |
G |
|
|
(3.1) |
||
|
dA = F dr. |
||
Формулу (3.1) можно записать и по-другому:
dA = F drG cos α = F dl cos α = Fl dl,
где Fl - проекция силы на направление траектории, dl – элементарный
путь (рис.1.4). Выражение для работы при конечном перемещении из точки 1 в точку 2 будет выражаться интегралом:
2 |
G |
G |
(3.2) |
A12= ∫F dr. |
|||
1 |
|
|
|
Если же на тело одновременно действуют несколько сил, то их суммарная работа равна алгебраической сумме работ каждой силы, или, ина-
че, равна работе результирующей силы |
G |
G |
||
|
G |
G |
||
|
A рез = ∫Fрез dr |
= ∫∑Fi |
dr = ∑A i. |
|
|
|
|
i |
i |
Знак работы каждой силы в этой сумме зависит от направления век- |
||||
G |
drGi . Сила совершает положительную работу, когда она на- |
|||
торов Fi и |
||||
правлена "по движению" (α< π 2), и отрицательную – когда она направлена "против движения" ( α > π
2), и отрицательную – когда она направлена "против движения" ( α > π 2 ).
2 ).

34 Глава 3. Работа и энергия
Сила, перпендикулярная к траектории частицы, работы не совершает. Так, в частности, всегда равна нулю работа силы, действующей на
движущуюся заряженную частицуG со стороны магнитногоG поля:
Aмагн = ∫Fмагн drG = ∫q vG, B vGdt = 0.
Кроме того, надо учитывать, что drG – это перемещение точки при-
ложения силы. Например, при движении тела с закрепленным центром тяжести работа силы тяжести равна нулю! Помимо работы можно определить мощность силы, которая равна работе, совершенной за единицу времени:
|
dA |
G |
G |
|
P = |
|
= F |
v. |
(3.3) |
dt |
2. Кинетическая энергия частицы
Пусть на движущуюся частицу действует некоторая силаG FG . B результате движение частицы изменяется (меняется скорость v ). Найдем,
чему равна работа силы по изменению скорости частицы. Для этого запи- |
||||||||||||||||||||||||||||
шем второй закон Ньютона |
m |
dvG |
|
= ∑FG |
и умножим каждую его часть |
|||||||||||||||||||||||
dt |
|
|||||||||||||||||||||||||||
скалярно на элементарное перемещение drG. В итоге получим: |
|
|||||||||||||||||||||||||||
|
dvG |
|
|
G |
|
|
|
G drG |
|
|
|
G G |
|
G |
G |
|
|
|
|
|||||||||
m |
|
|
|
dr |
= mdv |
|
|
|
= mvdv = ∑Fdr = d A. |
|
|
|
|
|||||||||||||||
dt |
dt |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
G G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vx2 |
+v2y +vz2 |
v2 |
|
|||
Но vdv =v |
x |
dv |
x |
+v |
y |
dv |
y |
|
+v |
z |
dv |
z |
= d |
|
|
|
= d |
|
, |
|||||||||
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
и поэтому |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mv2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
= dA . |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Величину |
|
K = |
|
mv2 |
|
называют кинетической энергией частицы. Та- |
||||||||||||||||||||||
|
|
|
2 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ким образом, работа всех сил, действующих на частицу, идет на изменение ее кинетической энергии, т.е.
|
mv2 |
|
mv2 |
2 |
G G |
|
|
dK = dA или K2 − K1 = |
2 |
− |
1 |
= ∫ |
∑Fdr. |
(3.4) |
|
2 |
2 |
||||||
|
|
1 |
|
|
3. Консервативные силы и потенциальная энергия |
35 |
||
|
3. Консервативные силы и потенциальная энергия |
|
|
|
|
Определение: сила, работа которой |
|
|
|
не зависит от формы и длины пути (от тра- |
|
|
|
ектории точки приложения силы), называ- |
|
|
|
ется консервативной силой (рис.3.2,а). |
|
|
|
Математически условие консерватив- |
|
|
|
ности силы выражается в виде: |
|
|
|
G G |
(3.5) |
|
|
v∫Fdr = 0 . |
|
|
|
Действительно, как следует из рис. |
|
|
Рис.3.2 |
3.2,б и формулы (3.2), работа консерватив- |
|
|
ной силы на замкнутом пути в силу опре- |
||
|
|
||
деления будет: Aзамкн = A12+ A 21 = A12 − A12 = 0 . Величина |
G G |
||
v∫adr на- |
|||
зывается циркуляцией вектора aG . Поэтому условие (3.5) читается так :
циркуляция консервативной силы по любому замкнутому контуру равна нулю.
Из определения консервативной силы вытекает и еще одно важнейшее свойство: работу консервативной силы можноG представить, как изменение (убыль) некоторой скалярной функции U (r ) , зависящей только от
положения частицы (тела), которая называется потенциальной энергией: dA конс = FGконсdrG = −dU ,
или
2 |
|
U (rG1) −U (rG2 ) = −∆U = ∫FGконсdrG. |
(3.6) |
1 |
|
В том, что это действительно так, можно убедиться на примерах, рассмотренных в следующем параграфе.
Последняя из формул (3.6) являются определением потенциальной энергии. Из нее следует, что потенциальная энергия определена с точностью до произвольной постоянной. Так как определена только ее разность, то к выражению U можно добавить или вычесть
любую постоянную величину.
Например, потенциальную энергию тела (рис.3.3) можно вычислять относительно уровня любого этажа здания, относительно
Рис.3.3 уровня моря, относительно центра Земли и т.д.; величина ее при этом, конечно, будет
36 |
Глава 3. Работа и энергия |
||
|
|
|
|
разной, но работа консервативной силы тяжести при перемещении тела m во всех случаях будет одной и той же!
Поэтому в каждом конкретном случае договариваются о начале отсчета потенциальной энергии (в какой именно точке следует считать
U= 0 из соображений удобства).
4.Потенциальная энергия центральных сил
|
|
|
|
|
|
|
|
|
|
Определение: силы, действующие |
|
|
|
|
|
|
|
|
|
|
по прямой, соединяющей частицы, и за- |
||
|
|
|
|
|
|
|
|
|
висящие только от расстояния |
r между |
|
|
|
|
|
|
|
|
|
|
ними, называются центральными. Об- |
||
|
|
|
|
|
|
|
|
|
щим для всех центральных сил будет |
||
|
|
|
|
|
|
|
|
|
следующий силовой закон: |
|
|
|
|
|
|
Рис.3.4 |
|
FGцентр(rG) = f (r) eGr , |
(3.7) |
||||
где eGr = rG r – единичный вектор, направленный от одной частицы к дру- |
|||||||||||
гой. Как видно из рис.3.4, при смещении одной из частиц на drG |
получаем |
||||||||||
eGr drG = |
|
eGr |
|
|
|
drG |
|
cos α = dr , |
т.е. изменению расстояния между частицами. |
||
|
|
|
|
||||||||
Поэтому работа любой центральной силы будет: |
|
||||||||||
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
A центр= ∫FGцентр drG = ∫ f (r) dr. |
|
||
|
|
|
|
|
|
|
|
|
1 |
1 |
|
Для любой функции |
f (r) |
результат интегрирования определяется |
|||||||||
лишь начальным r1 и конечным |
r2 положениями траектории, и может |
||||||||||
быть записан в виде A центр=U (r1) −U (r2 ).
Поэтому любая центральная сила является консервативной, и частица в поле центральных сил обладает потенциальной энергией. Примерами центральных сил могут служить гравитационная, кулоновская и упругая силы.
Вычислим потенциальную энергию различных центральных сил. 1) Сила гравитационного притяжения:
FG |
= −G |
m1m2 |
eG |
, поэтому |
f (r) = −G |
m1m2 |
. Выберем U = 0 |
|
|
||||||
грав |
|
r2 |
r |
|
|
r2 |
|
при r =∞ . ТогдаG работа перемещения частицы 2 (рис.3.5) из бесконечности в точку r будет:
5. Градиент потенциальной энергии |
37 |
|
|
|
|
r |
|
m m |
|
m m |
|
|
A = ∫ |
−G |
1 2 |
dr =G |
1 2 |
= 0 −U (r). |
|
r2 |
r |
|||||
∞ |
|
|
|
|
|
|
|
|
Следовательно, потенциальная энергия при- |
||||
|
|
|
|
|
тяжения двух точечных масс |
||||
|
|
|
|
|
Uграв(r) = −G |
m1m2 |
. |
||
|
|
|
|
|
|
||||
|
Рис.3.5 |
|
|
|
|
r |
|||
|
|
2) Кулоновская сила: |
|||||||
FG |
|
|
|
|
|||||
(r) = k |
q1q2 |
eG |
, поэтому |
f (r) = k |
q1q2 |
. Если снова выбрать U = 0 |
|||
|
|
||||||||
кул |
|
r2 |
r |
|
|
r2 |
|||
при r =∞ , то для потенциальной энергии взаимодействия двух точечных зарядов получим выражение аналогичное предыдущему:
Uкул(r) = k q1q2
3) Сила упругости: FGупр = −k rG = −k r eGr ,rт.е. f (r) = −k r ( k – жесткость, r - удлинение деформируемого тела). Полагаем U = 0 при r = 0
|
(рис.3.6), поэтому |
|
|
|
|
||
|
r |
(−k r) dr = − |
kr2 |
= −U (r). |
|||
|
A = ∫ |
|
2 |
||||
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Итак, потенциальная энергия упругой |
||||||
|
силы (или упругой деформации) |
||||||
Рис.3.6 |
Uупр(r) = |
k r |
2 |
. |
|
||
|
|
|
|||||
|
|
|
|
||||
|
|
2 |
|
|
|
||
Отсюда, в частности, следует, что работа, которую надо совершить для удлинения пружины на r , равна k2r2 .
5. Градиент потенциальной энергии
Как следует |
из определения |
потенциальной |
энергии |
(3.6), |
|||
G |
G |
= −dU. . С учетом |
G |
G |
G |
G |
|
dA конс = Fконс dr |
dr |
= idx + jdy + kdz получим: |
|||||
−dU = Fxdx + Fydy + Fzdz . Отсюда, при перемещении вдоль оси |
x , ко- |
||||||
гда dy = dz = 0 , находим −dU = F dx , т.е. F |
= − |
dU |
|
|
|
≡ −∂U . |
|
|
|||||||
|
|
|
|||||
x |
x |
dx |
|
y,z=const |
∂x |
||
|
|
|
|
||||
38 |
Глава 3. Работа и энергия |
||
|
|
|
|
|
Проекция консервативной силы на ось |
x равна частной производ- |
|
ной от потенциальной энергии по x - координате (частная производная берется по одной переменной в предположении, что все остальные пере-
менные не изменяются). Аналогично F = − |
∂U |
и |
|
F |
|
= − |
∂U |
. |
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
∂y |
|
|
|
|
|
z |
|
|
∂z |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Таким образом, консервативная сила выражается через потенциаль- |
||||||||||||||||||||||||||||||||||||||||||||||
ную энергию следующим образом: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
FG |
|
|
|
= −iG∂U − Gj ∂U |
|
−kG∂U . |
|
|
(3.8) |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
конс |
|
|
|
|
∂x |
|
|
|
|
|
∂y |
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Введем дифференциальный оператор “набла”: |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
G |
∂ |
|
G |
∂ |
|
|
G |
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
= i |
|
+ |
j |
|
|
|
|
+ k |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
(3.9) |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
∂y |
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Им можно подействовать |
|
|
|
|
|
|
|
функцию f (x, y, z) . |
||||||||||||||||||||||||||||||||||||||||
|
на любую скалярную |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
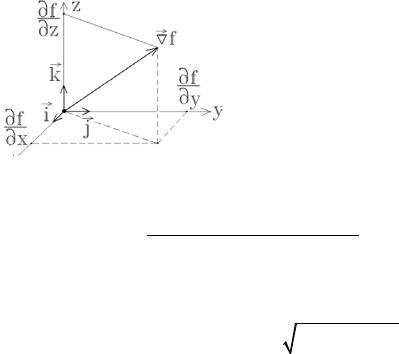
В результате получается вектор с про- |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
екциями |
∂f |
, |
|
|
|
∂f |
, |
∂f |
|
(рис.3.7), кото- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
∂y |
|
|
∂z |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рый называется градиентом функции f : |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
(x, y, z) ≡ grad f (x, y, z)= |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
∂ |
|
|
G |
|
|
∂ |
|
|
|
|
G |
|
∂ |
|
|
|
|
|
|
|
(3.10) |
|||||||
|
|
|
|
Рис.3.7 |
|
|
|
|
|
|
|
|
= |
|
i |
|
|
|
|
|
+ j |
|
|
|
|
|
|
+ k |
|
|
|
|
f (x, y, z) . |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
∂y |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|||||||||||||||
|
|
|
Итак, зная потенциальную энергию частицы, можно простым диф- |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
ференцированием найти действующую на нее консервативную силу: |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Наоборот, по |
|
Fконс = − U |
≡ −gradU. |
|
|
|
|
|
|
|
|
|
|
(3.11) |
|
||||||||||||||||||||||||||||||
|
|
|
|
выражению для силы можно интегрированием найти |
||||||||||||||||||||||||||||||||||||||||||||
|
потенциальную энергию частицы (формула (3.6)). |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
Пример: пусть U = |
α , где r = |
|
|
x2 + y2 + z2 |
и α = const . Тогда |
|||||||||||||||||||||||||||||||||||||||||
|
G |
|
G∂U |
|
G∂U |
|
|
G |
r |
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
G |
|
|
|
|
||||||||
|
|
|
|
|
∂U |
|
|
|
∂U |
∂r |
|
|
|
|
∂U |
∂r |
|
∂U ∂r |
|
|||||||||||||||||||||||||||||
F |
= − i |
∂x |
+ j |
∂y |
|
+ k |
|
∂z |
= − |
i |
∂r ∂x |
+ j |
|
∂r |
∂y |
|
+ k |
|
∂r ∂z |
= |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
∂U G |
x |
|
G |
y |
|
|
G |
|
z |
|
|
∂U rG |
|
|
|
|
G |
|
|
∂U |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
= − |
|
i |
|
+ j |
|
|
|
+ k |
|
|
|
= − |
|
|
|
|
|
|
|
|
= −er |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
∂r |
r |
r |
|
|
|
∂r r |
|
|
∂r |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||

5. Градиент потенциальной энергии |
39 |
|
|
|
|
Таким образом, в случае действия центральных сил, зависящих только от r , при вычисленииG градиента можно использовать только радиаль-
ную часть оператора :
G |
G ∂ |
|
|
|
|
|
|
|
|
r = −er |
|
. |
|
|
|
|
|
|
|
∂r |
|
|
|
|
|
|
|||
|
|
G |
G |
∂ |
α |
G |
α |
|
|
Поэтому в рассмотренном примере F |
= −er |
|
|
|
= er |
|
. При |
||
|
r2 |
||||||||
|
|
|
|
∂r |
r |
|
|
||
α = −G m1 m2 получается сила гравитации Ньютона, при α = k q1 q2 – сила Кулона.
Эквипотенциальные поверхности
Геометрическое место точек, в которых потенциальная энергия частицы (или потенциал) одинакова, называется эквипотенциальной поверх-
ностью. Уравнение такой поверхности имеет вид: U S = const .
При перемещении по этой поверхности dU = 0 , и из выражения FdrG G = Fl dl = −dU = 0 следует, что проекция силы Fl на эквипотенциальную поверхность всегда равна нулю. Поэтому
вектор консервативной силы всегда перпендикулярен эквипотенциальнойGповерхности.
Если n – единичный вектор нормали к эквипотенциальной поверх-
ности, то Fn = −∂∂Un , и при dU > 0 Fn < 0 , следовательно,
вектор консервативной силы направлен в сторону убывания (уменьшения) потенциальной энергии, и в этом же направлении под действием силы будут ускоряться все тела. Вектор grad U также на-
правлен по нормали к эквипотенциальной поверхности, но в сторону возрастания U , т.е. противоположно силе.
1) однородноеG поле тяжести: g = const
(рис.3.8); 2) гравитационное
поле точечной массы M :
FGграв = −G mrM2 eGr , изо-
Рис.3.8 |
Рис.3.9 |
браженное на рис.3.9. На |

40 |
Глава 3. Работа и энергия |
||
|
|
|
|
обоих рисунках штриховыми линиями изображены эквипотенциальные поверхности, а также показаны направления градиентов потенциальной энергии и сил тяготения.
6. Механическая энергия частицы и закон ее изменения
Сумма кинетической и потенциальной энергий частицы называется ее полной механической энергией: E = K +U .
Если на частицу действуют только консервативные силы, то с одной стороны, dA = −dU , а с другой стороны, как следствие второго зако-
на Ньютона, dA = dK . Поэтому −dU = dK или d (K +U )= dE = 0.
Иначе говоря, механическая энергия частицы, подверженной действию только консервативных сил, сохраняется. Отсюда, кстати, и на-
звание этих сил: “conservare” (лат.) – сохранять.
Неконсервативные силы
Неконсервативными называются силы, работа которых зависит от длины и формы пути. Отсюда следует, что на замкнутом пути работа неконсервативных сил не равна нулю, и с ними не связана потенциальная энергия.
Примерами неконсервативных сил являются: сила трения скольжения и силы вязкого трения. Так, из рис.3.10 видно, что работа силы трения скольжения зависит не от переме-
щения тела, а от длины пути: Aтр = −µN l , и не равна нулю при возвращении тела в исходную точку.
Пусть на частицу действуют как консервативные, так и неконсервативныеG силы. Тогда уравнение движения будет
m ddtv = ∑FGконс +∑FGнеконс . Умножая его скалярно на drG, получим:
m dvG drG = ∑FGконс drG +∑FGнеконс drG dK = −dU + dA неконс или dt
|
|
dE = d (K +U )= dAнеконс . |
(3.12) |
Изменение полной механической энергии частицы равно работе всех действующих на нее неконсервативных сил:
2 G G
∆E = A неконс = ∫F неконс dr.
1