

Fizika_Laboratornye_raboty / 2
.pdfКАЗАНСКАЯ ГОСУДАРСТВЕННАЯ АРХИТЕКТУРНО-СТРОИТЕЛЬНАЯ АКАДЕМИЯ
_________________________________________________________
Кафедра физики
МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ЛАБОРАТОРНЫМ РАБОТАМ ПО ФИЗИКЕ
для студентов специальностей
2903, 2906, 2907, 2908, 2910
Лабораторная работа № 2
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНРЕЦИИ ТВЕРДЫХ ТЕЛ МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ
Казань - 1997
Составитель: Э. М. Ягунд Под редакцией В. В. Алексеева, Л. И. Маклакова
УДК 539.15
Методические указания к лабораторным работам по физике для сту- дентов дневного и заочного отделений специальностей 2903, 2906, 2907, 2908, 2910/ Казанская государственная архитектурно-строительная акаде- мия; Составитель Э. М. Ягунд. Под редакцией В. В. Алексеева, Л. И. Мак- лакова. Казань, 1997 г. 12 с.
В работе основные величины и законы вращательного движения. Приведена экспериментальная установка.
Илл. 4. Табл. 1.
Рецензент профессор кафедры общей физики Казанского госунивер- ситета Фишман А.И.
ãКазанская государственная архитектурно-строительная академия, 1997 г.
2

КИНЕМАТИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ.
Положение точки на окружности характеризуется углом ϕ, отсчиты- ваемым от некоторого начального положения радиуса-вектора. Введем
|
ϕ |
|
вектор угла поворота ϕ , кото- |
||||
|
|
||||||
|
|
рый совпадает по направлению с |
|||||
|
|
||||||
|
ω |
|
осью |
вращения |
(рис.1). Его на- |
||
|
|
правление находится по правилу |
|||||
|
|
|
|
||||
|
|
|
|
правого винта. Модуль вектора |
|||
|
|
|
|
выбирается равным углу поворо- |
|||
|
|
|
υ |
та, выраженного в радианах. Вве- |
|||
|
|
|
дение угла поворота в форме век- |
||||
|
|
ϕϕ |
|||||
|
|
|
|||||
|
|
|
|
тора |
позволяет |
одновременно |
|
R R R |
|
||||||
|
охарактеризовать ось вращения и |
||||||
|
|
|
|
направление движения. |
|
||
|
|
|
|
|
Для характеристики |
быст- |
|
|
Рис.1 |
|
роты вращения вводится угловая |
||||
|
|
||||||
|
|
скорость ω . Вектор угловой |
|||||
|
|
|
|
||||
скорости направлен вдоль оси вращения по правилу правого винта |
(пра- |
||||||
вилу буравчика) и равен производной от угла поворота по времени:
r |
r |
рад ö |
dj æ |
||
w = |
ç |
÷ |
|
dt è |
с ø |
(1)
Если угловая скорость постоянна, то вращение называется равномер- ным. Для характеристики быстроты изменения угловой скорости вводится понятие углового ускорения ε , равного производной от угловой скорости по времени:
3
r |
dw æ |
радö |
e = |
ç |
÷ |
|
dt è |
с2 ø |
(2)
Вектор углового ускорения совпадает по направлению с вектором уг-
ловой скорости при ускоренном вращательном движении и направлен в
сторону, противоположную ω при замедленном вращении.
Быстроту перемещения точки по окружности, являющейся траек- торией движения, можно характеризовать с помощью линейной скорости υ, направленной по касательной к окружности.
Модуль вектора υ определяется соотношением
u = |
ds |
, |
|
dt |
|||
(3) |
|
||
|
|
где dS — бесконечно малый отрезок дуги окружности, пройденный за вре- мя dt. Учитывая, что dS = R×j , получаем
u = |
ds |
= |
d |
(R × j) = R × |
dj |
= R × w. |
(4) |
|
dt |
dt |
dt |
||||||
|
|
|
|
|
ЭЛЕМЕНТЫ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА.
1. Твердое тело является системой материальных точек, расстояние между которыми при движении не изменяется. При движении вокруг не-
подвижной оси все точки тела вращаются с одинаковой угловой скоростью
ω .
Чтобы твердое тело с закрепленной осью привести во вращение, не-
обходимо к некоторой точке тела приложить внешнюю силу F , не прохо- дящую через ось вращения и не параллельную ей (Рис.2). Если бы вектор силы совпадал по направлению с осью вращения, то это привело бы лишь к поступательному движению тела вдоль направления действия силы ( при условии, что тело не закреплено ).
4

|
|
|
F |
Установлено, что при враща- |
|
|
|
||
|
|
|
тельном движении материальной точ- |
|
O |
l |
|
ки или твердого тела их угловое уско- |
|
|
рение определяется векторной вели- |
|||
|
|
|
|
|
|
α |
|
чиной, называемой моментом силы. |
|
|
R |
|
Следовательно, момент силы характе- |
|
|
|
|
|
ризует вращательную способность си- |
|
|
|
|
лы. |
|
|
|
|
Способность силы вращать тело |
характеризуется моментом силы M . Моментом силы называется векторное произведение радиуса-вектора, про- веденного от оси вращения до точки приложения силы, на эту силу:
M = [R × F]. |
(5) |
Вектор M перпендикулярен |
к плоскости, проведенной через вектора |
R и F , и направлен в сторону поступательного движения правого винта, если его вращать в направлении силы.
Из (5) следует, что модуль момента силы М равен произведению мо- дуля силы на плечо l:
M = R × F ×sinα = F × l .
(6)
Плечом силы l = R× sinα называется кратчайшее расстояние между прямой, по которой действует сила, и осью вращения.
Вращающиеся тела противодействуют изменению своей угловой скорости, т.е. обладают инертностью. Величина, характеризующая инерт- ность тела при вращательном движении, называется моментом инерции I
. Момент инерции материальной точки равен I = mR2. Момент инерции твердого тела равен сумме моментов инерции элементарных частей mi , из которых оно состоит:
I = åRi2 × Dmi .
i
(7)
Практически вычисление такой суммы сводится к вычислению интеграла вида:
I = ò R2 ×dm ,
v
(8)
5

что для однородных твердых тел симметричной формы обычно является несложной задачей. В частности, можно показать, что для однородного
сплошного цилиндра (диска) момент инерции равен I = 21 mR2 , для шара
I = |
2 mR2 |
, для куба |
I = |
1 |
ma2 |
(а — сторона куба) и т.д. |
|
6 |
|||||||
|
5 |
|
|
|
|
Из формул (7) и (8) следует, что момент инерции тела зависит не только от его массы, но и (в большей степени) от распределения массы те- ла по отношению к оси вращения. Например, если рассмотреть два шара равной массы — стальной и алюминиевый, то момент инерции второго шара будет больше, т.к. радиус его в силу меньшей плотности алюминия будет больше радиуса стального шара.
Основной закон динамики вращательного движения записывается
как
εr = MI
(9)
и формулируется следующим образом: угловое ускорение, приобретаемое телом, пропорционально результирующему моменту внешних сил относи-
тельно оси вращения и обратно пропорционально моменту инерции тела относительно той же оси.
2. Главные оси инерции. Пусть твердое тело, на которое не действу- ют внешние силы, вращается вокруг произвольной оси. В общем случае, чтобы ось вращения оставалась неподвижной, к ней надо прикладывать определенные силы. Обычно для этого используют подшипники, которые удерживают ось вращения. Однако существуют такие оси вращения тел,
которые не изменяют своей ориентации в пространстве без действия на них внешних сил. Они называются главными осями инерции тела. Можно до- казать, что в любом теле существуют три взаимно перпендикулярные оси, проходящие через центр масс тела, которые могут служить главными ося- ми. Например, главные оси инерции однородного прямоугольного парал- лелепипеда проходят через центры противоположных граней (Рис.3) .
Для однородного цилиндра одной из главных осей инерции является его геометрическая ось, а в качестве остальных осей могут быть две любые взаимно перпендикулярные оси, проведенные через центр масс в плоско- сти, перпендикулярной геометрической оси цилиндра. Главными осями инерции являются любые три взаимно перпендикулярные оси, проходящие
6

через центр масс. Для тел сложной формы главные оси обычно определя- ются экспериментально.
Для устойчивости вращения большое значение имеет, какая именно из главных осей служит осью вращения. Можно показать, что в отсутствии
внешних сил вращение вокруг главных осей с наибольшим и наименьшим моментами инерции оказывается устойчивым, а вращение вокруг оси со средним моментом инерции — неустойчивым. Так, если подбросить тело, имеющее форму параллелепипеда, приведя его одновременно во вращение, то оно, падая, будет устойчиво вращаться вокруг осей 1 и 2 (Рис.3). Если рассмотреть более простой случай — тело в форме куба, то ясно, что мо- менты инерции относительно всех трех главных осей будут одинаковыми. Поэтому однородный куб в отсутствие внешних сил будет устойчиво вра- щаться вокруг любой из 3-х главных осей инерции.
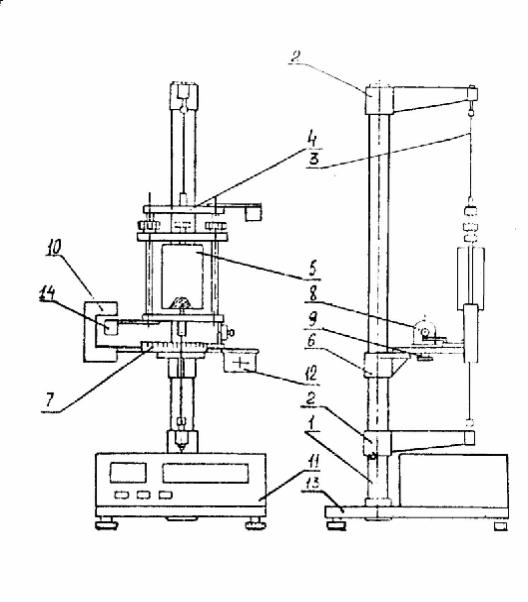
3. УСТРОЙСТВО И ПРИНЦИП РАБОТЫ УСТАНОВКИ.
Общий вид лабораторной установки изображен на Рис.4. Она пред-
|
ставляет собой |
настольный |
1 |
прибор и состоит из следую- |
|
щих основных частей: основа- |
||
2 |
ния 13, на вертикальной стой- |
|
3 |
ке 1 которого |
размещены |
верхний и нижний кронштей- |
||
|
ны 2, и электронного милли- |
|
|
секундомера 11. Между крон- |
|
|
штейнами 2 на стальной про- |
|
|
волоке 3 подвешена рамка 4, |
|
Ιmin |
предназначенная для установ- |
|
ки и закрепления исследуемо- |
||
|
го груза 5. В центрах граней |
|
Ιmax |
груза, в серединах его ребер и |
|
у вершин имеются углубления |
||
|
для закрепления в рамке. На |
|
Рис.3 |
кронштейне 6 размещена шка- |
|
|
ла 7, предназначенная для оп- |
|
ределения начального угла поворота рамки, электромагнит 8 для фиксации рамки и блок питания электромагнита 12. На кронштейне 6 закреплен фо- тоэлектрический датчик 10.
7
В данной работе момент инерции исследуемых тел определяется ме- тодом упругих колебаний. Исследуемое тело жестко закрепляется в рамке крутильного маятника, подвешенной на упругой вертикально натянутой стальной проволоке. Если вывести маятник из положения равновесия, то
Рис.4
вследствие деформации кручения проволоки в ней возникает момент упру- гих сил, стремящий вернуть рамке положение равновесия. В результате маятник будет совершать свободные колебания. Период этих колебаний
равен
8

T = 2π |
|
I M |
|
, |
|
D |
|||||
|
|
(10)
где IМ — момент инерции маятника относительно оси вращения, D — по- стоянная момента упругих сил.
Для обоснования формулы (10) можно рассмотреть аналогию с гар- моническим колебанием груза, закрепленного на пружине. Известно, что при выведении груза из положения равновесия система совершает свобод- ные колебания с периодом, равным
T = 2π |
|
m |
|
. |
|
k |
|||||
|
|
|
|
(11)
Здесь m — масса маятника является мерой инертности системы (ана- лог IМ при крутильных колебаниях), k — коэффициент жесткости пружины ( аналог D для крутильного маятника).
Момент инерции IМ маятника равен сумме моментов инерции рамки
и момента инерции исследуемого тела: I M = I0 |
+ I . |
|||||||||
Поэтому период колебания маятника |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
T = 2π |
|
I0 |
|
+ I |
|
. |
||||
|
|
D |
||||||||
(12) |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
Если колеблется рамка без тела, то ее период колебаний, очевидно, |
||||||||||
равен |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
T0 = 2π |
|
I0 |
|
. |
||||||
|
D |
|||||||||
(13) |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Решая совместно уравнения (12) и (13) можно исключить неизвест- |
||||||||||
ную величину D и в результате получить |
|
|||||||||
|
T 2 - T 2 |
|
||||||||
I = I0 × |
|
|
0 |
|
. |
|||||
|
|
|
T 2 |
|
||||||
(14) |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9
Соотношение (14) позволяет выразить момент инерции I тела через момент инерции Io самой рамки. Для этого нужно измерить периоды коле- баний Тo и Т соответственно для рамки и для рамки с телом. В свою оче- редь, для определения момента инерции Io рамки можно воспользоваться эталонным телом, момент инерции которого IЭ известен. Тогда из (14) лег-
ко получаем
|
|
T 2 |
|
I0 = IЭ |
|
0 |
, |
T 2 |
− T 2 |
||
|
Э |
0 |
|
(15)
где ТЭ — период колебаний рамки с закрепленным в ней эталонным телом. В качестве эталонного тела в работе используется однородный куб. Мо-
мент инерции такого куба относительно проходящей через его центр оси легко вычислить по формуле
IЭ = |
1 |
ma2 |
, |
|
6 |
||||
|
|
|
(16)
где m — масса куба, а — сторона куба.
Вычислив IЭ по формуле (16), можно измерить периоды колебаний To и ТЭ свободной рамки и рамки с кубом и затем определить величину Io из соотношения (15). После этого по формуле (14) не составляет никакого труда найти момент инерции любого тела относительно оси вращения, совпадающей с осью маятника.
4.ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ.
1.Включить в сеть шнур питания и нажать клавишу СЕТЬ на лице- вой панели электронного секундомера. При этом должны загореться циф- ровые индикаторы и лампочка фотодатчика. Дать секундомеру прогреться
1—2 мин.
2.Включить тумблер питания электромагнита.
3.Повернуть рамку 4 маятника (Рис.4) таким образом, чтобы флажок 14 коснулся якоря электромагнита 8. При этом начальное положение рамки окажется зафиксированным.
4.Нажать клавишу СБРОС на передней панели секундомера. При этом на цифровых индикаторах прибора должны высветиться нули.
5.Отключить тумблер питания электромагнита, после чего рамка начнет совершать крутильные колебания. Флажок 14, установленный на
10