

Вопрос 16.
Шлюпочные лебедки входят в состав шлюпочного устройства, основное назначение которого обеспечить быстрый и безопасный спуск и подъем спасательных (в соответствии с требованиями СОЛАС-74) и рабочих шлюпок. В настоящее время на морских судах для обслуживания спасательных и рабочих шлюпок, а также рабочих и разъездных катеров, применяют гравитационные шлюпбалки с нижней и верхней проводкой лопарей *, а именно: ростровые скатывающиеся шлюпбалки, одно- и двухшарнирные. Шлюпочные лебедки для морских судов нормализованы. С целью сокращения количества моделей число выпускаемых промышленностью типоразмеров шлюпочных лебедок ограничено. Основные характеристики шлюпочных лебедок типа ЛШ приведены в табл. 4.6.
|
Таблица 4.6. Основные характеристики нормализованных шлюпочных лебедок типа ЛШ | |||||||
|
Индекс |
Тяговое усилие, кH |
Скорость канатов, м/мин |
Диаметр стального каната, мм |
Канатоемкость, м |
Мощность электродвигателя, кВт |
Масса, кг | |
|
выбирания |
травления | ||||||
|
ЛШ1 ЛШЗД ЛШ4Д ЛШ5 |
16 40 63 100 |
11 20 20 12 |
60 60 50 60 |
11 15 24 29 |
2X40 2X40/2X60 2X60/2X90 2X60/2X90 |
2,2 7 14 14 |
330 750/780 1600/1700 1800/1980 |
|
Примечание. В знаменателе дроби — канатоемкость барабанов для модификаций лебедок и соответствующие им значения масс. | |||||||
Для удовлетворения требованиям СОЛАС-74 на судах устанавливаются также четырехшарнирные шлюпбалки и соответствующие им новые шлюпочные лебедки типа ЛШВ. Отличительной особенностью этих лебедок является то, что они устанавливаются не на палубе, а крепятся на шлюпбалках. Поэтому лебедки выполняются двухбарабанными, с приводом от одного электродвигателя. Кинематическая схема лебедки ЛШВ приведена на рис. 4.22.
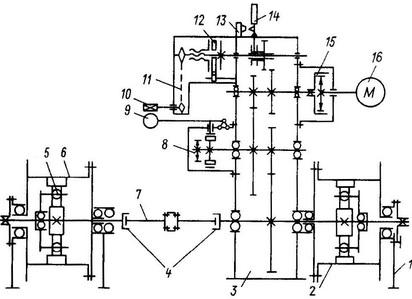 Рис.
4.22. Кинематическая схема лебедки ЛШВ
Рис.
4.22. Кинематическая схема лебедки ЛШВ
При подъеме шлюпки вращение от электродвигателя 16 передается через центробежную муфту 15, двухступенчатый цилиндрический редуктор 3 и трансмиссию 7 с зубчатыми муфтами 4 барабанам 2 и 6. Внутри каждого барабана имеется планетарный редуктор 5, понижающий частоту вращения трансмиссии. При спуске шлюпки вращение от барабанов через редукторы 5 передается трансмиссии 7 и через колеса редуктора — валу, на котором установлены ленточный 9 и центробежный 8 тормоза. Ручной привод 10 состоит из безопасной муфты 12 и цепной передачи 11. Включение муфты ручного привода рукояткой 14 блокирует выключатель 13, чтобы нельзя было включить электропривод. Лебедка крепится к шлюпбалкам стойками 1.
* Лопарь — гибкая связь между шлюпкой и шлюпочной лебедкой. В качестве лопарей в основном используют стальные канаты, реже — растительные или синтетические.
Вопрос 14.
Якорно-швартовное устройство является одним из наиболее важных судовых устройств, обеспечивающих безопасность эксплуатации судна. Шпилевые и брашпильные устройства предназначены для выбирания и спуска якорей, для выполнения швартовных и других операций. Работа каждого шпилевого и брашпильного электропривода определяется величиной тягового усилия, скоростью выбирания якорной цепи или швартовного троса, длительностью рабочего периода.
К электроприводам якорно-швартовных механизмов предъявляются следующие требования:
– возможность их использования при заданных условиях погоды и моря;
– надежность и безотказность в работе, в частности при колебаниях параметров питающей сети, установленных соответствующими правилами и нормами;
– возможность пуска в ход под полной нагрузкой;
– поддержание необходимого тягового усилия при малых скоростях выбирания цепи или троса вплоть до полной остановки;
– соразмерность максимального усилия тяги, развиваемого исполнительным электродвигателем, с прочностью цепи или троса;
– получение нормированных скоростей подъема якоря после отрыва от грунта, выбирания швартов и втягивания якоря в клюз;
– способность удержания якоря на весу в случае потери питания электроэнергией;
– обеспечение безопасного спуска якоря на заданную глубину;
– небольшие масса, габариты и стоимость установки;
– удобство и простота управления и обслуживания.
Все якорно-швартовные механизмы обычно выпускаются с электрооборудованием морского исполнения переменного тока 380 и 220 В частотой 50 Гц и постоянного тока 220 В.
Электродвигатели, командоконтроллеры, кулачковые контроллеры и другие элементы электрооборудования, устанавливаемые на палубе, должны быть водозащищенного исполнения; магнитные контроллеры, устанавливаемые в помещениях, должны быть брызгозащищенного исполнения.
Якорно-швартовные механизмы должны допускать возможность оборудования их устройствами для дистанционной (с мостика) отдачи якоря. Они также должны быть снабжены счетчиками длины вытравленной якорной цепи, допускающими установку дистанционных репитеров.
Якорно-швартовные механизмы оборудуются автоматическим тормозом на валу электродвигателя с устройством для ручного растормаживания. Тормоз предназначен для удерживания механизма от разворота при действии в цепи на звездочке (соединенной с приводом) статического усилия извне, величина которого составляет не менее 1,3–2,0 номинального. Для швартовных шпилей это усилие составляет 1,5 номинального тягового усилия шпиля.
Для якорно-швартовных механизмов рекомендуются три основные группы электроприводов:
1) с двигателями постоянного тока, питающимися от сети;
2) с двигателями переменного тока, питающимися от сети;
3) с двигателями постоянного тока, питающимися от автономных преобразователей – электромашинных (системы Г – Д) или статических.
Для двух первых групп применяются силовые кулачковые контроллеры или магнитные контроллеры с дистанционным управлением. Группа электроприводов по системе Г – Д имеет обычно дистанционное управление.
Все три группы электроприводов могут иметь один или два приводных электродвигателя. Приводы с двумя электродвигателями применяются только для крупных якорных и якорно-швартовных механизмов с калибром цепи свыше 62 мм.
На постоянном токе используются двигатели смешанного возбуждения серии ДПМ, характеристики которых специально подобраны исходя из требований, предъявляемых к электроприводам палубных механизмов.
Из двигателей переменного тока преимущественно применяются короткозамкнутые асинхронные двигатели. Для нормальных якорно-швартовных шпилей с калибром цепи до 28 мм, всех облегченных механизмов и швартовных шпилей с тяговым усилием до 3000 кгс рекомендуются двухскоростные двигатели; для всех остальных механизмов целесообразно использование трехскоростных двигателей. В отечественной серии МАП предусмотрены двухскоростные двигатели на мощность 2–10 кВт и трехскоростные – на мощность 10–60 кВт.
На рис. 2.3 дана схема управления переменного тока для якорно-швартовных механизмов мощностью от 10 до 25 кВт с помощью кулачкового контроллера. Приводной двигатель трехскоростной, причем основной частотой вращения является средняя, на ней производится выбирание якорной цепи с номинальной нагрузкой и отрыв якоря от грунта. Высшая скорость используется для выбирания свободных швартовных канатов, а низшая – для втягивания якоря в клюз и для безопасного подтягивания судна к причалу.
Переключение группы обмоток малой и средней частоты вращения и обмотки большой частоты вращения осуществляется контактором КМ1.
|
|
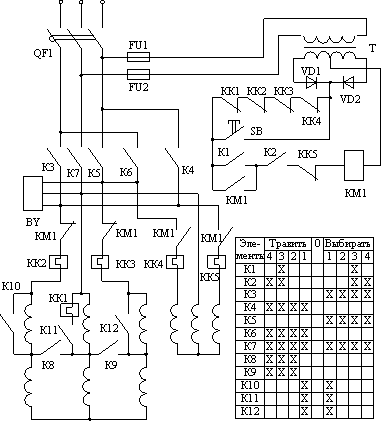
Рис. 2.3. Схема электропривода переменного тока
при управлении с помощью кулачкового контроллера
Работа на большой скорости ограничивается сравнительно небольшими нагрузками. Чтобы не допустить перегрузки, в схеме предусмотрено тепловое реле КК5, имеющее номинальный ток на одну ступень ниже тока обычной тепловой защиты. При срабатывании реле КК5 катушка контактора КМ1 размыкается и двигатель переключается с большей частоты вращения на среднюю.
Чтобы исключить звонковое включение обмотки большой скорости при перегрузке, катушка контактора КМ1 включается на промежуточном третьем положении, а на четвертом рабочем положении катушка питается через блок-контакты КМ1. Защита контроллера – типовая, с помощью автоматического выключателя QF1 и тепловых реле КК1 – КК4. При необходимости работы привода в условиях тепловой перегрузки двигателя контакты тепловых реле шунтируются кнопкой SB.