

5. Автоматические регуляторы частоты синхронных генераторов.
Назначение, принцип действия и основные характеристики.
Частота переменного тока является важным параметром режима энергосистемы, а отклонение частоты от номинальной — показателем качества электрической энергии [1]. Отсутствие возможности запасать электро-энергию и непрерывное изменение нагрузки электроэнер-гетической системы обусловливают непрерывное соот-ветствие генерируемой и потребляемой мощностей. Нарушения указанного соответствия или баланса мощно-стей приводят к изменениям частоты. Следовательно, частота является параметром, характеризующим соотно-шение генерируемой и потребляемой мощностей. По значению и знаку отклонения частоты от номинальной в установившемся режиме и по скорости и направлению изменения частоты в переходном режиме можно судить о знаке и значении возникающего небаланса мощности, а следовательно, и об изменении мощности электростанций, необходимом для восстановления частоты.
В энергосистемах поддержание равенства генерируе-мой и потребляемой мощностей и постоянства частоты вращения осуществляется путем изменения генерируе-мой мощности электростанций и возлагается на автома-тическую систему регулирования частоты и активной мощности (АРЧМ). Система АРЧМ должна осущест-влять наиболее экономичное регулирование частоты, т. е. обеспечить минимум производственных издержек по энергосистеме при данных суммарном потреблении и размещении потребителей. Кроме того, в крупных энер-госистемах (объединениях) система АРЧМ должна под-держивать заданные значения перетоков мощностей между частями объединенной энергосистемы, что связа-но с недостаточной пропускной способностью линий электропередачи, ограничивающей эти перетоки, или с хозяйственной самостоятельностью частей объединен-ной энергосистемы.
Автоматическое регулирование частоты принципиаль-но может производиться изменением мощности любого агрегата на любой электростанции энергосистемы соот-ветствующими устройствами регулирования, которые входят в состав автоматической системы управления мощностью (АСУМ) электростанции или отдельного энергоблока. Поэтому в процессе регулирования часто-ты АСУМ является подсистемой АРЧМ и выполняет ряд функций (см. § 5-4). Все автоматические регуляторы и регулируемые объекты оказываются связанными между собой через регулируемый процесс, поскольку частота является единым параметром, одинаковым в установив-шихся режимах во всей энергосистеме, что и позволяет рассматривать их взаимодействующую совокупность как единую систему АРЧМ.
На регулируемых объектах системы АРЧМ имеются автоматические регуляторы частоты вращения (АРЧВ)
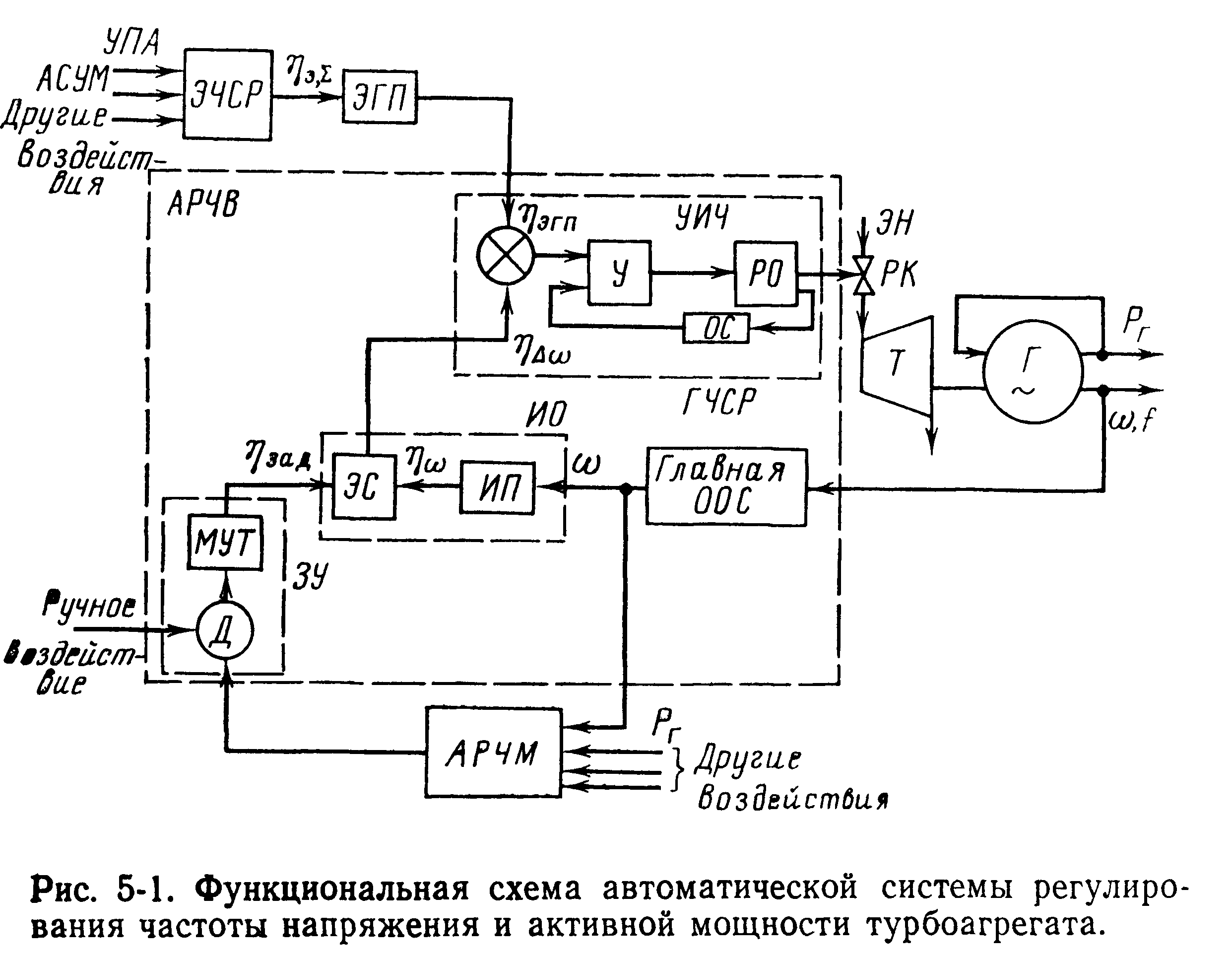
первичных двигателей — турбин Т (рис. 5-1). Регуляторы частоты вращения осуществляют первичное автома-тическое регулирование частоты напряжения и активной мощности синхронного генератора Г. Они изменяют впуск энергоносителя ЭН турбины Т, воздействуя на ее регулирующие клапаны РК соответственно отклонению Δω частоты вращения от заданного значения ωзад, определяемому возмущающим воздействием — изменением электрической мощности генератора Рг.
Автоматический регулятор частоты вращения (АРЧВ) состоит из измерительного органа ИО (измерительный преобразователь ИП, элемент сравнения ЭС) и усили-тельно-исполнительной части УИЧ (усилитель У и регу-лирующий орган РО на рис. 5-1). В измерительном пре-образователе ИП частота вращения ω турбины преоб-разуется в сигнал который элементом сравнения ЭС сопоставляется с сигналом ηзад о заданном значении ча-стоты вращения ω3ад. Сигнал ηзад формируется задаю-щим устройством ЗУ, которое состоит из механизма управления турбиной МУТ и приводящего его в действие электродвигателя Д. Электродвигатель управляется опе-ратором (ручное воздействие) или автоматически.
В зависимости от результата сравнения сигналов из-меняются впуск пара в турбину и угловая частота ее вращения.
Автоматический регулятор частоты вращения совме-стно с регулируемым объектом — турбоагпегатом обра-зует замкнутую по цепи главной ООС автоматическую систему регулирования (АСР) частоты врашения.
Статические и динамические характеристики регули-рования определяются структурой АСР, которая пред-ставляется в виде взаимодействующей совокупности типовых звеньев [28]. Важное значение имеет наличие интегрирующего звена во внешней по отношению к воз-мущающему воздействию Рг части АСР. Интегрирую-щим звеном может быть представлен регулирующий орган РО, в качестве которого обычно используется гидравлический исполнительный механизм (ГИМ). На-личие интегрирующего звена во внешней части АСР в принципе создает возможность астатического регули-рования частоты. Однако при астатическом регулиповя- нии не обеспечивается распределение активной мощно-сти между параллельно работающими агрегатами.
Как известно, при охвате интегрирующего звена жесткой отрицательной обратной связью (местная ОС на рис. 5-1) образуется инерционное звено и регулирова-ние частоты вращения становится статическим