

kontemirov
.pdfy1(t,xP2)=0; y2(t,xP1)=0; "t, xP1, xP2 . (4)
При этом сигнал ХP1 можно рассматривать как возмущение для У2, а сигнал ХP2 – как возмущение для У1. Тогда перекрестные каналы играют роль каналов возмущения (рисунок 1.11.1 и рисунок 1.11.2). Для компенсации этих возмущений в систему регулирования вводят Динамические устройства с передаточными функциями R12(p) и R21(p), сигналы от которых поступают на соответствующие каналы регулирования или на входы регуляторов.
По аналогии с инвариантными АСР передаточные функции компенсаторов R12(p) и R21(p), определяемые из условия автономности, будут зависеть от передаточных функций прямых и перекрестных каналов объекта и будут равны:
; |
, (5) |
; |
. (6) |
Так же, как в инвариантных АСР, для построения автономных систем регулирования важную роль играет физическая реализуемость и техническая реализация приближенной автономности.
Условие приближенной автономности записывается для реальных компенсаторов с учетом рабочих частот соответствующих регуляторов:
 при w=0; w=w
при w=0; w=w
 при w=0; w=w
при w=0; w=w
Р2
Р1
, (7)
. (8)
(а) – компенсация воздействия от второго регулятора в первом контуре регулирования (б) – компенсация воздействия от первого регулятора во втором контуре регулирования Рисунок 2 - Структурные схемы автономных АСР

Рисунок 3 - Структурная схема автономной системы регулирования двух координат
В химической технологии одним из самых сложных многосвязных объектов является процесс ректификации. Даже в простейших случаях – при разделении бинарных смесей – в ректификационной колонне можно выделить несколько взаимосвязанных координат. Например, для регулирования процесса в нижней части колонны необходима стабилизация минимум двух технологических параметров, характеризующих материальный баланс по жидкой фазе и по одному из компонентов.
13) то же самоеТиповой процесс автоматизации нагревание и охлаждение часть 1
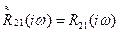
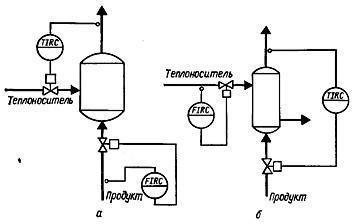
Основные принципы управления процессом 'Нагревания рассмотрим на примере поверхностного кожухотрубчатого теплообменника (рис. 4.17), в который подают нагреваемый продукт и теплоноситель. Показателем эффективности данного процесса является температура tn" продукта на выходе из теплообменника, а целью управления - поддержание этой температуры на определенном уровне. Зависимость температуры tп" от параметров процесса может быть найдена из уравнения теплового баланса:
где Gп, Gт расходы соответственно продукта и горячего теплоносителя; сп> Ст - удельные теплоемкости продукта и горячего теплоносителя; tn', tг' - температуры продукта и горячего теплоносителя на входе в теплообменник; tт" - температура горячего теплоносителя на выходе из теплообменника.
Решая данное уравнение относительно tп", получим:
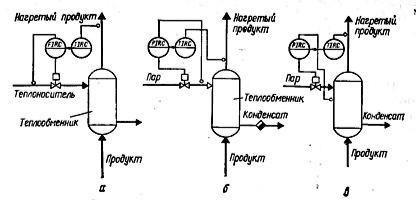
Рис. 4.17. Типовая схема автоматизации процесса нагревания.
Расход теплоносителя Gт можно легко стабилизировать или использовать для внесения эффективных регулирующих воздействий. Расход продукта Gп определяется другими технологическими процес¬сами, а не процессом .нагревания, поэтому он не может быть ни стабилизирован, и использован для внесения регулирующих воздействий; при изменении Gп в теплообменник будут поступать сильные возмущения. Температуры tп и t'т, а также удельные теплоемкости сп и ст определяются технологическими режимами других процессов, поэтому стабилизировать их при ведении процесса нагревания невозможно. К неликвидируемым возмущениям относятся также изменение температуры окружающей среды и свойств теплопередающей стенки вследствие отложения солей, а также коррозии. Анализ объекта управления показал, что большую часть возмущающих воздействий невозможно устранить. (В связи с этим следует в качестве регулируемой величины брать температуру tn", а регулирующее воздействие осуществлять путем изменения расхода Gт. Теплообменники как объекты регулирования температуры обладают большими запаздываниями, поэтому следует уделять особое внимание выбору места установки датчика и закону регулирования. Для уменьшения транспортных запаздываний датчик температуры необходимо помещать как можно ближе к теплообменнику. Для устранения запаздывания значительный эффект может дать применение регуляторов с предварением и исполнительных механизмов с позиционерами.
В качестве контролируемых величин следует принимать расходы теплоносителей, их конечные и начальные температуры, давления. Знание текущих значений этих параметров необходимо для нормального пуска, наладки и эксплуатации процесса. Расход Gт требуется знать также для подсчета технико-экономических показателей процесса, а расход Gп и температуру t для оперативного управления процессом. Сигнализации подлежат температура tn" и расход продукта. В связи с тем что резкое падение расхода Оп может послужить причиной выхода из строя теплообменника, устройство защиты в этом случае должно перекрывать линию горячего теплоносителя.
Рис. 4.18. Двухконтурные системы регулирования процесса нагревания с использованием в качестве вспомогательной регулируемой величины расхода теплоносителя (а), давления пара (б) и давления в межтрубном пространстве (в).
Все рассуждения в отношении процесса нагревания справедливы и для процесса охлаждения. Объектом управления в этом случае будет являться кожухотрубный теплообменник, в который подается холодоноситель и охлаждаемый продукт; показателем эффективности - конечная температура продукта, а целью управления - поддержание этой температуры на заданном значении. Основным узлом управления будет регулятор конечной температуры охлаждаемого продукта, регулирование же будет осуществляться путем изменения расхода холодоносителя.
Каскадно-связанное регулирование.
Использование двухконтурных САР значительно улучшает качество регулирования конечной температуры продукта (основная регулируемая величина), если вспомогательной величиной
выбрать параметр, изменение которого будет сильным возмущением для процесса теплообмена. Часто в качестве вспомогательного параметра выбирают расход теплоносителя (рис. 4.18,а); если теплоносителем служит пар с переменным давлением, то предпочтительнее брать давление теплоносителя (рис. 4.18,6) или давление в межтрубном пространстве (рис. 4.18,б). Последний вариант схемы следует использовать при переменных расходе и температуре нагреваемого продукта, так как давление в межтрубном пространстве является гораздо менее инерционным параметром, чем конечная температура продукта. Регулирование процесса байпасированием продукта. Для регулирования систем, в которых изменение расхода теплоносителя недопустимо, используют метод байпасирования. Регулирующее воздействие в этих случаях осуществляется изменением расхода байпасируемого продукта (рис. 4.19,с).
Рис. 4.19. Схема регулирования температуры изменением расхода продукта в байпйсном
.трубопроводе:
а - с помощью одного клапана; б - с помощью двух клапанов; в - с помощью трехходового клапана.
Поскольку перемещение регулирующего органа на байпасной линии все же приводит к некоторому изменению расхода продукта, при высоких требованиях к постоянству этого расхода устанавливают два мембранных исполнительных механизма разных типов (НО и НЗ, рис. 4.19,6). Аналогичный эффект достигается при установке трехходового смесительного клапана (рис. 4.19,в).
Регулирование методом байпасирования. улучшает динамическую характеристику системы, так как при этом из цепи регулирования исключается теплообменник.
Регулирование процесса изменением расхода конденсата греющего пара. Если теплообменник работает при частичном заливе конденсата, регулирующие воздействия можно вносить изменением расхода конденсата. Это влечет за собой изменение уровня конденсата в теплообменнике. При этом перераспределяются поверхности теплообмена между конденсирующимся паром и продуктом, с одной стороны, и конденсатом и продуктом - с другой. Интенсивность теплообмена, а затем и температура продукта на выходе теплообменника меняются. Такая система позволяет повысить эффективность работы теплообменника на 6 - 7% благодаря полному использованию тепла пара и конденсата. Однако вследствие больших запаздываний эта система может быть рекомендована лишь при условии отсутствия резких возмущающих воздействий.
Регулирование процесса изменением температуры горячего-теплоносителя.
Если насос теплоносителя установлен после теплообменника, то стабилизировать конечную температуру продукта можно путем изменения начальной температуры горячего теплоносителя за счет рециркуляции части отработанного теплоносителя. Достоинством данного метода является постоянство расхода и скорости теплоносителя в теплообменнике, что обеспечивает высокие и стабильные значения коэффициента теплоотдачи.
Регулирование процесса изменением расхода продукта.
Если для качественного управления процессом теплообмена допустимо изменение или стабилизация расхода продукта, то в зависимости от возможных возмущающих воздействий может быть принят один из вариантов схем регулирования, показанных на рис. 4.20. Стабилизирующие регуляторы расхода теплоносителя и расхода продукта ликвидируют возмущения до поступления их в систему.
Рис. 4.20. Схемы регулирования процесса нагревания: а - со стабилизацией расхода продукта; б - с изменением расхода продукта в зависи¬мости от конечной температуры продукта.
Регулирование процесса в теплообменниках смешения.
Малейшие изменения параметров теплоносителя при непосредственном смешении двух и более жидкостей приводят к значительным и быстрым изменениям конечной температуры продукта, поэтому при управлении теплообменников смешения часто применяют связанное регулирование и регулирование соотношения расхода теплоносителя и продукта с коррекцией по температуре продукта.
Регулирование работы трубчатых печей.
В нефтеперерабатывающей и нефтехимической промышленности широкое применение находят трубчатые печи, в которых продукт, непрерывно прокачиваемый через змеевик, нагревается за счет тепла, выделяющегося при сжигании топлива. Трубчатая печь является сложным объектом регулирования; стабилизацию конечной температуры продукта в ней необходимо обеспечить при значительно изменяющихся температуре и расходе продукта. Постоянно изменяется также состояние змеевика и тепловой изоляции. Компенсация всех воздействий осуществляется изменением количества подаваемого в печь топлива.
В связи с тем, что для трубчатой печи характерны большие запаздывания (20 - 30 мин по каналу «расход топлива - конечная температура продукта»), целесообразно использовать связанное регулирование. На рис. 4.21, с представлена схема регулирования расхода топлива с коррекцией по температуре нагреваемого продукта на выходе из печи. Качество регулирования заметно улучшается при введении вспомогательного контура регулирования температуры топочных газов над перевальной стенкой. Это улучшение сильно влияет на температуру продукта на выходе из печи. Схема на рис. 4.21,6 обеспечивает регулирование температуры продукта на выходе из печи с учетом изменений температуры над перевальной стенкой и расхода нагреваемого продукта. Качество регулирования можно улучшить также, введя дополнительно регулятор расхода
.нагреваемого продукта.
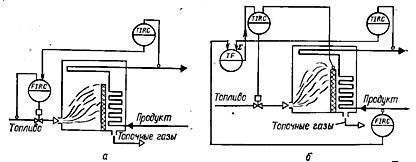
Рис. 4.21. Схемы связанного регулирования процесса в трубчатой печи;
14)Регулирование основных технологических параметров
Основные технологические параметры, характеризующие химико-технологические процессы — это расход, уровень, давление, температура, рН, а также параметры качества: концентрация готового продукта и его физико-химические свойства (плотность, вязкость, влажность и др.).
При регулировании расхода нужно учитывать некоторые особенности, не присущие обычно системам регулирования других технологических параметров. Первая особенность — небольшая (обычно пренебрежимо малая) инерционность объекта регулирования, который представляет собой, как правило, участок трубопровода между первичным измерительным преобразователем для измерения расхода и регулирующим органом. После перемещения штока регулирующего органа в новое положение новое значение расхода устанавливается за доли секунды или, в крайнем случае, за несколько секунд. Это означает, что динамические характеристики системы определяются главным образом инерционностью измерительного устройства, регулятора, исполнительного устройства и линией передачи сигнала (импульсных линий). Вторая особенность проявляется в том, что сигнал, соответствующий измеренному значению расхода, всегда содержит помехи, уровень которых высок. Частично шум представляет собой физические колебания расхода, частота которых настолько велика, что система не успевает на них реагировать. Наличие высокочастотных составляющих в сигнате изменения расхода — результат пульсаций давления в трубопроводе, которые в свою очередь являются следствием работы насосов, компрессоров, случайных колебаний расхода, например, при дросселировании потока через сужающее устройство. Поэтому при наличии шума, чтобы избежать усиления в системе случайных возмущений, следует применять малые значения коэффициента усиления регулятора.
Рассмотрим объект регулирования расхода — участок трубопровода 1, расположенный между местом измерения расхода (местом установки первичного измерительного преобразователя, например диафрагмы 2) и регулирующим органом 3 (рис. 1). Длина прямого участка трубопровода определяется правилами установки нормальных сужающих устройств и регулирующих органов и может составить несколько метров. Динамику объекта (трубопровода) — канала расход вещества через регулирующий клапан— расход вещества через расходомер— можно представить статическим зве-
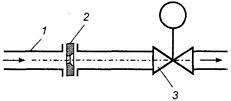
Рис.1. Фрагмент системы регулирования расхода.
ном первого порядка с транспортным запаздыванием. Значение постоянной времени  составляет несколько секунд; время транспортного запаздывания
составляет несколько секунд; время транспортного запаздывания для газа — доли секунды, для жидкости — несколько секунд.
для газа — доли секунды, для жидкости — несколько секунд.
Поскольку инерционность объекта при регулировании расхода незначительна, к выбору технических средств управления и методов расчета АСУ предъявляются повышенные требования.
Большинство современных первичных измерительных преобразователей расхода возможно рассматривать как статические звенья нулевого порядка, а исполнительное устройство (исполнительный механизм вместе с регулирующим органом) — как статическое звено первого порядка с постоянной времени Т в несколько секунд. Для повышения быстродействия пневматического исполнительного устройства применяют позиционеры. Пневматические линии связи представляют статическим звеном первого порядка с транспортным запаздыванием (постоянная времени Т и время транспортного запаздывания  определяются длиной линии связи и составляют несколько секунд).
определяются длиной линии связи и составляют несколько секунд).
Если расстояния между функциональными элементами системы управления велики, то по длине импульсной линии устанавливают дополнительные усилители мощности, чтобы увеличить быстродействие системы.
В системах регулирования расхода применяют различные способы изменения расхода:
•дросселирование потока вещества через регулирующий орган (клапан, заслонка, шибер и др.), установленный на трубопроводе;
•изменение угловой скорости вращения рабочего вала насоса или вентилятора;
•байпасирование потока (под байпасированием понимается переброс части вещества из основной магистрали в обводную линию).
АСР расхода применяются:
üдля стабилизации возмущений по технологическим потокам;
üкак внутренние контуры каскадных АСР других технологических параметров;
üдля регулирования соотношения расходов технологических потоков в одноконтурных и каскадных АСР.

Технологические цели АСР расхода:
üобеспечение заданного состава смеси;
üподдержание материального и теплового балансов в аппарате;
üстабилизация производительности установки.
Участок трубопровода, как объект регулирования
для данного объекта характерно: малая инерционность, соизмеримая с инерционностью цепи контроля и регулирования.
Выбор контура регулирования диктуется требованиями, предъявляемыми к качеству регулирования:
П-регулятор ® быстродействующий контур в качестве вспомогательного контура в каскадных АСР;
ПИ-регулятор ® для регулирования без статической ошибки;
ПД- и ПИД-регуляторы ® не рекомендуются из-за возможного наличия высокочастотных помех в сигнале расхода.
Способы нанесения регулирующего воздействия в АСР расхода
1. Дросселирование потока с помощью клапана, шибера, заслонки и т.д.
QН = QC
Применяется при условии того, что напор насоса примерно соответствует напору сети: НН = НС.
2. Байпассирование потока (перепускание потока из линии нагнетания в линию всасывания)
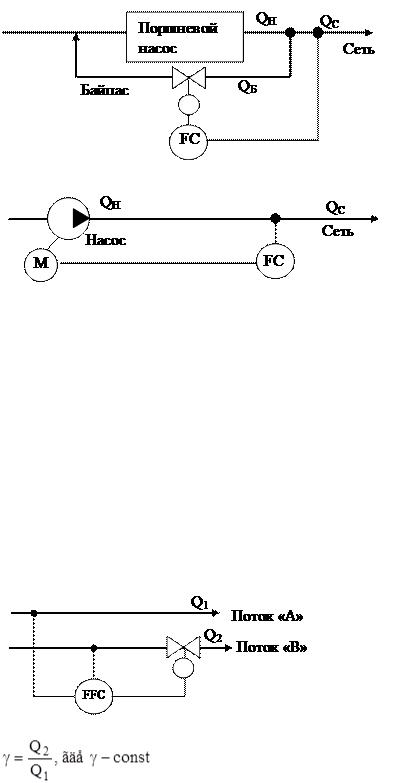
QН = QБ + QC
Применяется при условии: QC » QH.
3. Изменение числа оборотов
привода насоса (изменение напора в трубопроводе). hН = hC = const
Система регулирования соотношения расходов
Q1 – ведущий поток, т.е. поток, изменяющийся независимо.
Q2 – ведомый поток, т.е. поток, который приводится в заданное соотношение с ведущим Q1: Q2 = g Q1.
1. Регулирование соотношения расходов при независимой общей нагрузке (Q1= var).
g - задание регулятору соотношения

Пример контура регулирования соотношения расходов, как внутреннего контура каскадной системы для куба ректификационной колонны
Каналы управления:
GГП ® QПИТ и GГП ® ТНК
По каналу питания QПИТ действуют существенные возмущения и канал GГП ® QПИТ обладает большой инерционностью, поэтому более рационально использовать регулятор соотношения.
Показатель эффективности процесса – концентрация продукта в кубовом остатке, но изменение концентрации не всегда возможно, поэтому рассматривают косвенный показатель эффективности температуру низа колонны ТНК.
R1 Þ GГП = g QПИТ, при QПИТ = var.
R2 Þ коррекция задания регулятору R1, т.е. изменение g.
2. Регулирование соотношения расходов при заданной общей нагрузке.
1) АСР соотношения расходов по схеме ”топливовоздух”.
Для полного сжигания топливного газа необходимо на каждую долю топлива подавать 10 долей воздуха. Это соотношение выдерживает АСР рассмотренная на рис. В регуляторе Р27 кроме операции регулирования, производится еще операция соотношения (масштабирования): F2=10*F1