

-
Контроль работоспособности объектов
В общем случае объект может находиться в конечном множестве состояний
S = (s1,..., si,..., sp)
Каждому состоянию соответствует определенное значение какого-либо диагностического признака
= (1,…,j,....r).
Рисунок 14 – Связь значений диагностического параметра и состояний ОД

Область работоспособности определяется как область изменения диагностических параметров, ограниченная их допустимыми значениями, в которой объект работоспособен.
Допустимые доп определяются из анализа диагностической модели и с помощью приближенного расчета:
![]()
![]()
где
![]() запас относительно предельного параметра
запас относительно предельного параметра
![]() ,
,
![]() - номинальное значение диагностического
параметра, к – коэффициент запаса.
- номинальное значение диагностического
параметра, к – коэффициент запаса.
При этом не учитывается влияние множества случайных факторов, воздействующих на объект. На практике нормальная работа критичных схем обеспечивается при отключении напряжений не более чем на 10% от номинального значения.
Состояние систем характеризуется совокупностью диагностических признаков. При этом условие работоспособности можно задавать в пространстве диагностических признаков , исходя из следующих предположений:
-
Определено множество состояний S ОД, т.е. совокупность диагностических признаков ;
-
Существуют номинальные лучшие состояния, т. е. определены ном;
-
Отклонения работоспособных состояний от номинальных допу скаются в определенных пределах S соответствующих диапазону н...в (н — нижнее, в — верхнее значение).
Судовое оборудование может представлять собой как непрерывные, так и дискретные объекты. Условия работоспособности для непрерывных и дискретных объектов формулируются по-разному. Например рассмотрим некоторые виды оборудования и соответствующие диагностические параметры.
Таблица 1 – Параметры, характеризующие состояние ОД
|
Примеры ОД |
Диагностический параметр |
||||
|
Сопротивление |
Темпе-ратура |
Вибра-ция |
Ударные импульсы |
||
|
Изоля-ции |
Постоян-ному току |
||||
|
Генераторы переменного тока |
+ |
+ |
+ |
+ |
+ |
|
Двигатели переменного тока |
+ |
+ |
+ |
+ |
+ |
|
Полупроводниковые преобразователи |
|
+ |
+ |
|
|
|
Аккумуляторы |
+ |
|
+ |
|
|
|
Аппаратура управления и защиты |
+ |
+ |
+ |
|
|
|
Аппаратура связи, сигнализации, управления |
+ |
|
+ |
|
|
|
Кабели, провода |
+ |
|
+ |
|
|
Условия работоспособности по одному диагностическому параметру непрерывных объектов задаются неравенствами, которые ограничивают его значение одной стороны:
i > iн (Ru > 50 МОм, сопротивление изоляции более 50 МОм);
i > iв (L < 2 мм, амплитуда вибрации меньше 2 мм);
В большинстве случаев на диагностические параметры задаются двусторонние ограничения вида:
![]() (3A<I<5A)
(3A<I<5A)
![]() (Ur=273В)
(Ur=273В)
Если состояние СО определяется несколькими параметрами то задачу контроля работоспособности сводят к проверке таких неравенств для каждого параметра. Если хотя бы одно из неравенств не выполняется, то объект признается неработоспособным.
Если в качестве ДП используется одна характеристика, то оценить состояние СО можно двумя путями:
-
по нескольким показателям характеристики;
-
по отклонению текущей характеристики от номинальной.
-
Примером первого способа является контроль состояния ОД по показателям переходной характеристики =(, , n, s, tпп).
Рисунок 15 – Переходная характеристика
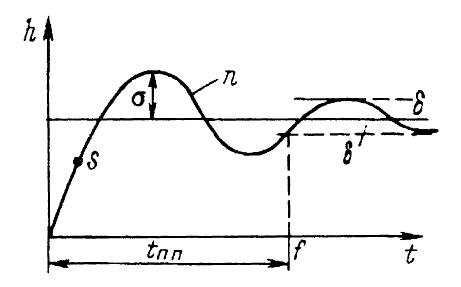
- величина перерегулирования,
- статическая точность,
n - число колебаний,
s - крутизна,
tпп – время переходного процесса.
Для решения задачи необходимо задать условия работоспособности на каждый показатель доп
-
Если в качестве диагностических признаков рассматривается характеристика ОД у = f(х), где х и у соответственно входная и выходная переменные, то условия работоспособности определяются значением отклонения текущей характеристики f(х) объекта от номинальной (х). При этом необходимо установить количественный критерий, который позволял бы оценивать сходство и различие этих характеристик. Таких критериев существует несколько:
а) критерий среднего отклонения
![]()
Где
интеграл
![]() численно
равен площади.
численно
равен площади.
Рисунок 16 – Номинальная y(x) и текущая f(x) характеристики
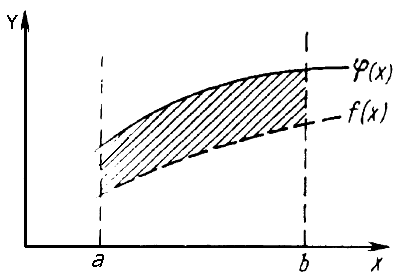
Недостатком этого критерия является одинаковая чувствительность как к величине абсолютного отклонения, так и к длительности интервала, на котором оценивается отклонение.
б) критерий среднеквадратичного отклонения
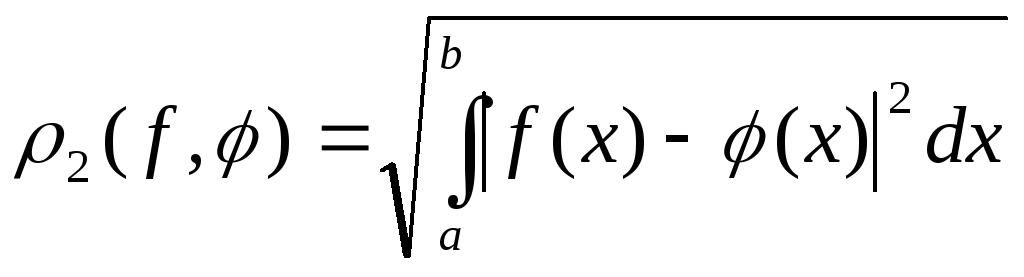
Этот критерий более чувствителен к величине отклонения, чем к
длительности интервала, на котором отклонение оценивается. Он наиболее часто используется на практике.
-
Дискретные объекты
Рисунок 17 – дискретный объект диагностирования
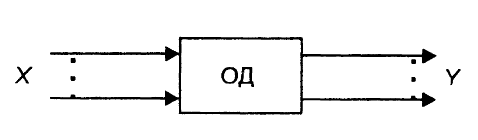
При определении работоспособности дискретного объекта , он рассматривается как преобразователь набора входных воздействий Xk в выходные Yk.
Xk=(x1…,xi…, xn), i=1,n;
Yk=(y1…,yi…, yn), j=1,m.
Где xi, yj значения напряжений на входе и на выходе;
n – число входов;
m – число выходов.
Обычно в качестве хi, и уi, рассматриваются сигналы 0 и 1 (0 — напряжение отсутствует, 1 — напряжение имеется). В комбинационной схеме (объекте без элементов памяти) выходной набор зависит только от набора входных воздействий. Поскольку каждому входному набору Xk соответствует определенный выходной набор Yk, то условием работоспособности такого дискретного объекта является соответствие всех возможных входных наборов Xk выходным наборам Yk, T.e. X={Xk}Y={Yk} = {Ykном].
При рабочем диагностировании Xk — рабочие воздействия.
При тестовом диагностировании для проверки условий работоспособности необходимо построить минимальную входную последовательность наборов, позволяющую оценивать состояния всех элементов объекта.
Рисунок 18 – Комбинационная схема
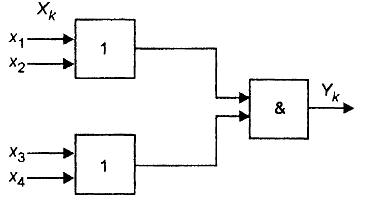
Объект имеет четыре входа n = 4,
входной набор X = (х1, х2, х3, x4)
один выход m = 1,
Выходной набор реализует функцию F = (х1 х2 х3 х4).
-
Проверку элементов будем осуществлять подачей сигналов 1 на входы элементов.
-
Для срабатывания всех элементов объекта необходимо наличие двух единиц.
Таблица 2 -Таблица состояний
|
|
|
|
Xk |
|
Yk |
|
1 |
1 |
1 |
0 |
0 |
0 |
|
2 |
1 |
0 |
1 |
0 |
1 |
|
3 |
1 |
0 |
0 |
1 |
1 |
|
4 |
0 |
1 |
1 |
0 |
1 |
|
5 |
0 |
1 |
0 |
1 |
1 |
|
6 |
0 |
0 |
1 |
1 |
0 |
Таких наборов оказывается шесть. Из таблицы видно, что для проверки всех элементов объекта достаточно четырех входных наборов N=4, а именно x1, = (1100), Х3 = (1001), Х4 = (0110), x6 = (0011) или x1, x2, x5, x6, т.е. 2-й и 3-й, 4-й и 5-й наборы адекватны по воздействию на объект. Таким образом, минимальная тестовая последовательность, достаточная для проверки условия работоспособности, включает четыре вектора T1 = (x1, x3, x4, x6) или Т2 = (x1, x2, x5, x6), а условия работоспособности представляют соответствия:
Х1 Y1 = 0; Х3 Y3 = 1; Х4 Y4 = 1; Х6 Y6 = 0.
Для сложного ОД, состоящего из нескольких подсистем, вектор состояния имеет вид S = (S1,..., si, ..., sn). Условием работоспособноcти такого объекта является работоспособность каждой подсистемы. Состояние подсистемы имеет два исхода: работоспособна — 1, неработоспособна — 0. Тогда условие работоспособного состояния:
Sp = (1, ...1,...1).
Для каждой подсистемы условия работоспособности могут записываться так как выше.