

§2. Кинетическая энергия вращения
Рассмотрим абсолютно твердое тело, вращающееся около неподвижной оси z, проходящей через него (рис. 2.1). Мысленно разобьем это тело на маленькие объемы с элементарными массами m1, m2, …, mn находящиеся на расстоянии r1, r2 …, rn от оси.
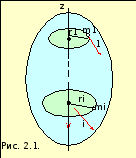
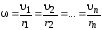
Угловая скорость вращения этих объемов одинакова:
 (2.1)
(2.1)
Кинетическую энергию вращающегося тела найдем как сумму энергий его элементарных объемов:

Используя выражение (2.1), получаем

где Jx – момент инерции тела относительно оси z. Таким образом, кинетическая энергия вращающегося тела

В случае плоского движения тела, например цилиндра, скатывающегося с наклонной плоскости без скольжения, энергия движения складывается из энергии поступательного движения и энергии вращения:
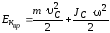
где т – масса катящегося тела;
c – скорость центра масс тела;
Jc – момент инерции тела относительно оси, проходящей через его центр масс;
– угловая скорость
§3. Момент силы. Уравнение динамики вращательного движения твердого тепа
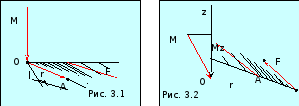
Моментом силы F относительно точки O называется физическая величина, определяемая векторным произведением радиуса-вектора r, проведенного из точки O в точку A приложения силы, на силу F (рис. 3.1):

Здесь М — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от r к F.
Модуль момента силы
 (3.1)
(3.1)
где – угол между r и F;
 – кратчайшее
расстояние между линией действия силы
и точкой O
–
плечо
силы.
– кратчайшее
расстояние между линией действия силы
и точкой O
–
плечо
силы.
Моментом силы F относительно оси z называется скалярная величина Mz, равная проекции на эту ось вектора М момента силы, определенного относительно произвольной точки O данной оси x (рис. 2.2). Значение момента М, не зависят от выбора положения точке O на ось z.
Если ось z совпадает с направлением вектора М, то момент силы:

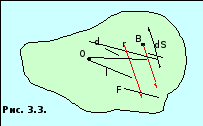
Выражение для работы при вращении тела (рис. 3.3):
 (3.2)
(3.2)
Учитывая (3.1), можем записать

где
 — момент силы относительно осиz.
— момент силы относительно осиz.
Таким образом, работа при вращении тела равна произведению момента действующей силы на угол поворота.
Работа при вращении тела вдет на увеличение его кинетической энергии:

но
 ,
поэтому
,
поэтому ,
или
,
или
 .
.
Учитывая,
что
 ,
получаем:
,
получаем:
 (3.3)
(3.3)
Уравнение (3.3) представляет собой уравнение динамики вращательного твердого тела относительно неподвижной оси.
Или в векторном виде:
 (3.4)
(3.4)
где J – главный момент инерции тела (момент инерции относительно главной оси).
§4. Момент импульса и закон его сохранения
Моментом импульса (количеством движения) материальной точки A относительно неподвижной точки O называется физическая величина, определяемая векторным произведением:

где r – радиус-вектор, проведённый из точки O в точку A;
 –импульс
материальной точки (рис. 4.1.);
–импульс
материальной точки (рис. 4.1.);
L – псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от r к p.

Модуль вектора момента импульса:

где – угол между векторами r и p,
l – плечо вектора p относительно точки O.
Моментом импульса материальной точки A относительно неподвижной оси Z называется скалярная величина Lz, равная проекции на эту ось вектора момента импульса. Значение момента импульса Lz не зависит от положения точки O на оси Z.
Моментом импульса материальной точки:

и направлен по оси в сторону, определяемую правилом правого винта.
Момент импульса твердого тела относительно оси есть сумма моментов импульсов отдельных материальных точек:

Используя
формулу
 ,
получим:
,
получим:

таким образом:

где Jz – момент инерции тела;
– угловая скорость.
Продифференцировав последнее уравнение по времени, получим:
т.е.
 .
.
Это выражение - ещё одна форма уравнения (закона) динамики вращательного движения твёрдого тела относительно неподвижной оси.
В
замкнутой системе момент внешних сил
M=0
и
 ,
откуда:
,
откуда:
 .
.
Выражение представляет собой закон сохранения момента импульса: момент импульса замкнутой системы сохраняется, т.е. не меняется с течением времени.
Основная связь между величинами и уравнениями, определяющие вращение тела вокруг неподвижной оси и его поступательном движении:
|
№ |
Поступательное движение |
Вращательное движение | ||
|
| ||||
|
|
Масса |
m |
Момент инерции |
J |
|
|
Скорость |
|
Угловая скорость |
|
|
|
Ускорение |
|
Угловое ускорение |
|
|
|
Сила |
F |
Момент силы |
Mz или M |
|
|
Импульс |
|
Момент импульса |
|
|
|
Основное уравнение динамики |
|
Основное уравнение динамики |
|
|
|
Работа |
|
Работа вращения |
|
|
|
Кинетическая энергия |
|
Кинетическая энергия вращения |
|














-