

§ 2. Кинетическая и потенциальная энергии
Кинетическая энергия механической системы — это энергия механического движения этой системы.
Сила F, действуя на покоящееся тело и вызывая его движение, совершает работу, а энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа dA силы F на пути, который тело прошло за время возрастания скорости от 0 до , идёт на увеличение кинетической энергии dEк тела, т. е.

Используя
второй закон Ньютона
 и умножая на перемещениеdr,
получаем:
и умножая на перемещениеdr,
получаем:
 .
.
Так
как
 ,
то
,
то

откуда
Таким образом, тело массой m, движущееся со скоростью , обладает кинетической энергией
 (2.1)
(2.1)
Потенциальная энергия – механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
При перемещении тела из одного положения в другое, работа, совершаемая действующими силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положения. Такие поля называются потенциальными, а силы, действующие в них, – консервативными.
Работа консервативных сил на замкнутой траектории равна нулю. Это утверждение поясняет рис. 2.1.
Свойством
консервативности обладают сила тяжести
и сила упругости. Для этих сил можно
ввести понятие потенциальной энергии.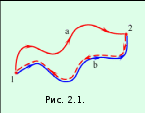
Работа консервативной силы A12a = A12b. Работа на замкнутой траектории A = A12a + A21b = A12a – A12b = 0.
Тело, находясь в потенциальном поле сил, обладает потенциальной энергией Eп. Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счет убыли потенциальной энергии:
 (2.2)
(2.2)
Работа dA выражается как скалярное произведение силы F на перемещение dr и выражение (2.2) можно записать в виде
 (2.3)
(2.3)
Следовательно, если известна функция Еп ( r ), то из формулы (2.3) можно найти силу F по модулю и направлению.
Потенциальная энергия может быть определена исходя из (2.3) как
 (2.4)
(2.4)
где C – постоянная интегрирования.
Если
тело перемещается вблизи поверхности
Земли, то на него действует постоянная
по величине и направлению сила тяжести
 .
Работа этой силы зависит только от
вертикального перемещения тела. На
любом участке пути работу силы тяжести
можно записать в проекциях вектора
перемещения
.
Работа этой силы зависит только от
вертикального перемещения тела. На
любом участке пути работу силы тяжести
можно записать в проекциях вектора
перемещения на осьOY:
на осьOY:

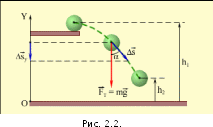
где
 – проекция силы тяжести,ΔSy
– проекция вектора перемещения. Если
тело переместилось из точки, расположенной
на высоте h1,
в точку, расположенную на высоте h2
от начала координатной оси OY
(рис. 2.2.),
то сила тяжести совершила работу:
– проекция силы тяжести,ΔSy
– проекция вектора перемещения. Если
тело переместилось из точки, расположенной
на высоте h1,
в точку, расположенную на высоте h2
от начала координатной оси OY
(рис. 2.2.),
то сила тяжести совершила работу:
 .
.
Эта
работа равна изменению некоторой
физической величины
 ,
взятому с противоположным знаком. Эту
физическую величину называютпотенциальной
энергией
тела в поле силы тяжести
,
взятому с противоположным знаком. Эту
физическую величину называютпотенциальной
энергией
тела в поле силы тяжести
Ep = mgh.
Она равна работе, которую совершает сила тяжести при опускании тела на нулевой уровень.
Работа силы тяжести равна изменению потенциальной энергии тела, взятому с противоположным знаком.
A = –(Ep2 – Ep1).
Найдём потенциальную энергию упругодеформированного тела (пружины). Сила упругости пропорциональна деформации:

где Fупр — проекция силы упругости на ось х,
k — коэффициент упругости (для пружины – жёсткость),
знак минус указывает, что Fупр направлена в сторону, противоположную деформации х.
По третьему закону Ньютона, деформирующая сила равна по модулю силе упругости и противоположно ей направлена, т. е.

Элементарная работа dA, совершаемая силой Fx при бесконечно малой деформации dx, равна:

а полная работа
 .
.
идет на увеличение потенциальной энергии пружины. Таким образом, потенциальная энергия упругодеформированного тела:

Полная механическая энергия системы:

т.е. равна сумме кинетической и потенциальной энергий.