

Тема: ДИНАМИКА ТВЁРДОГО ТЕЛА.
ЛЕКЦИЯ 8Д.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТВЁРДОГО ТЕЛА.
-
Дифференциальные уравнения поступательного движения твёрдого тела.
-
Дифференциальные уравнения вращательного движения твёрдого тела.
-
Дифференциальные уравнения плоского движения твёрдого тела.
1. Дифференциальные уравнения поступательного движения твёрдого тела
![]()
![]() (8.1)
(8.1)
![]()
Здесь m – масса тела, xc, yc, zc - координаты центра масс тела;
![]() проекции
внешней силы
проекции
внешней силы
![]() на оси координат,
на оси координат,
![]() проекции
главного вектора внешних сил
проекции
главного вектора внешних сил
![]() на эти оси.
на эти оси.
По дифференциальным уравнениям поступательного движения можно решать два основных типа задач на поступательное движение твёрдого тела:
-
по заданным уравнениям движения твёрдого тела определять главный вектор приложенных к нему внешних сил;
-
по заданным внешним силам, действующим на тело, и начальным условиям движения находить кинематические уравнения движения тела, если известно, что оно движется поступательно.
2. Дифференциальные уравнения вращательного движения твёрдого тела
|
|
|
Момент количества движения т. Мi тела относительно оси Z
где ri - радиус окружности, описываемой точкой Мi;
Кинетический момент твёрдого тела относительно оси Z
Здесь
то есть кинетический момент вращающегося твёрдого тела относительно неподвижной оси вращения равен произведению момента инерции тела относительно той же оси на угловую скорость тела.
|

Теорема об изменении кинетического момента механической системы
![]()
![]()
![]()
![]() (8.3)
(8.3)
- дифференциальное уравнение вращательного движения твердого тела
По дифференциальному уравнению (8.3) можно решать следующие задачи:
1) по заданному
уравнению вращения тела
![]() и
его моменту инерции Jz
определять главный момент внешних сил,
действующих на тело
и
его моменту инерции Jz
определять главный момент внешних сил,
действующих на тело
![]()
2) по заданным
внешним силам, приложенным к телу, по
начальным условиям вращения о
и ωо
и по моменту инерции тела Jz
находить
уравнение вращения тела
![]() ;
;
3) определять момент
инерции тела Jz
относительно
оси вращения, зная величины
![]() и .
и .
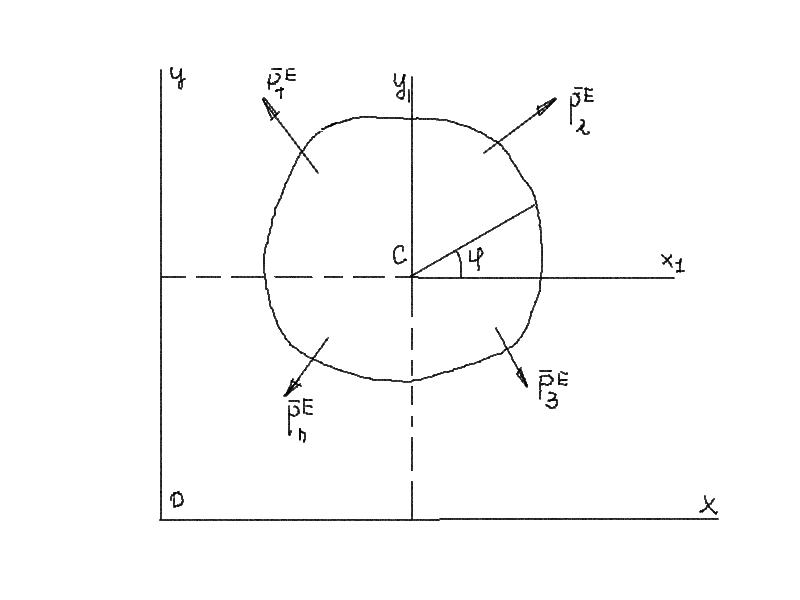
3. Дифференциальные уравнения плоского движения твёрдого тела
|
|
- уравнения плоскопараллельного движения твердого тела
|

Для определения третьего уравнения необходимо последовательно доказать две теоремы:
-
Теорема о зависимости между кинетическими моментами механической системы относительно неподвижного центра и относительно центра масс системы.
-
Теорема об изменении кинетического момента механической системы в относительном движении по отношению к центру масс. Первая Теорема
Плоское движение разложим на две составляющих:
-
относительное движение по отношению к подвижной системе координат.
-
переносное движение вместе с подвижной системой отсчёта Сх1,y1,z1, движущейся поступательно
Эти движения называют – поступательным движением системы с центром масс и относительным движением её по отношению к центру масс.
|
|
|
для точки Мi:
по определению
аналогично
1)
где
2)
Так как при доказательстве теоремы Кенига было получено:
3)
так как
4)
|
|
теорема |
|
При любом движении механической системы её кинетический момент относительно неподвижного центра равен геометрической сумме: момента относительно этого центра главного вектора количества движения системы, условно приложенного в центре масс, и кинетического момента системы в её относительном движении по отношению к центру масс относительно этого центра.
|
