

СА для заочников / Основы системного анализа-2012
.pdfвокупность точек пространства Z Y является траекторией функциониро-
вания системы.
Итак, под детерминированной системой без последействия (или ди-
намической системой Кламана) понимают упорядоченную совокупность
(T,X,Z,Y,{(t,xL)T},H,G) множеств T,X,Z,Y, {(t,xL )T} и операторов H и G,
обладающих следующими свойствами:
– T является подмножеством действительных чисел;
– {(t,xL)T}– множество отображений T X, удовлетворяющих сочле-
нению отрывков;
–оператор H реализует отображение (10.2);
–оператор выходов системы задается соотношением (10.3).
Развитие теории систем настоятельно выдвигает проблемы, изучение которых выходит за рамки детерминированных систем без последействия.
Связанное с этим расширение понятия системы идет по трем путям:
– учета специфики воздействия на систему входных сообщений раз-
личных классов;
–учета последействия;
–учета случайных факторов.
Необходимо рассмотреть эти факторы в порядке, диктуемом методи-
ческими соображениями.
91
Глава 11. Детерминированные системы без последействия
с входными сигналами двух классов
Рассматривается случай двух классов сигналов, которые называются
«обычными, неконтролируемыми входными сигналами» и «управляющи-
ми, контролируемыми входными сигналами».
За обычными сигналами сохраняются все ранее использованные обо-
значения: x(t) X – входной сигнал, поступающий в систему в момент вре-
мени t T; (t,xL)T – входное сообщение, являющееся элементом множества
{(t,xL)T} и т. д. Наряду с этим рассматриваются так же управляющие сигна-
лы u U, где U – множество управляющих сигналов системы.
|
Управляющий сигнал, поступающий в систему в момент времени |
|||||
t |
T, обозначается U(t). Если сигнал u |
U описывается набором характери- |
||||
|
|
|
|
|
|
|
стик |
u1,u2..ul, |
таких, что uk Uk, |
k=1, l , то прямое произведение |
|||
|
|
|
называется пространством управляющих сигналов систе- |
|||
U |
U1 |
U 2 ..U l |
||||
мы. Отображение u=M(t), t называется управляющим процессом; сово-
купность упорядоченных пар (t,uМ)T – управляющим сообщением.
Сужение этого отображение на полуинтервале (t1,t2] называется фрагментом управляющего процесса, а соответствующая ему совокуп-
ность упорядоченных пар (t,uM) – отрывком управляющего сообщения
(t,uM)T, поступающим в систему за полуинтервал (t1,t2] (обозначается как
(t,uM ]t2 ). Множество {(t,uM)T} должно удовлетворять условию сочленения.
t1
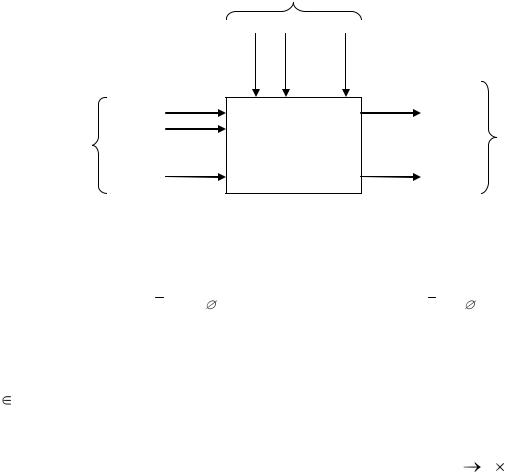
Входные и управляющие сигналы удобно рассматривать как элементы
единого |
множества |
|
|
|
обобщенных входных сигналов |
||
X |
X U |
||||||
|
|
(x, u) |
(x1 ,x 2 ,..xn , u1 , u2 ,..ul ) |
(рис 9). |
|
||
|
x |
|
|||||
Обобщенный входной сигнал x содержит полный набор координат xi
и uj в том случае, если в момент t в систему одновременно поступают входной сигнал xi и управляющий сигнал uj.
92
U
u1(t) u2(t)…ul(t)
x1(t)
Xx2(t)
…
xn(t)
Z
y1(t) |
|
y2(t) |
Y |
 … ym(t)
… ym(t)
Рис 9. Cигналы системы
При неодновременном поступлении сигналов xi и uj обобщенный сигнал имеет либо x =(x,u ) – входной сигнал, либо x =(x ,u) – управляю-
щий сигнал.
Совокупность упорядоченных троек (t,x,u), соответствующих всем
t T, где x=L(t), а u=M(t), называется обобщенным входным сообщением и обозначается (t, xL,uM)T. Иногда его называют (x,u) – сообщением. Обоб-
щенное входное сообщение определяется отображением T |
X U. |
Сужение этого отображения на полуинтервале (t1,t2] определяет от- |
|
рывок обобщенного сообщения и обозначается (t,x ,u |
]t2 . Множество |
L M t1
{(t,xL,uM)T} всех обобщенных входных сообщений удовлетворяет условию сочленения отрывков, если этому условию удовлетворяет множество
{(t,xL)T} и {(t,uM)T}.
Если за конечный полуинтервал (t1,t2] в систему поступает лишь ко-
нечное число входных и управляющих сигналов, процедура построения
(t,x |
,u |
M |
]t |
2 |
по заданным (t,x |
L |
]t |
2 |
и (t,u |
M |
]t |
2 |
сводится к упорядочиванию сигна- |
L |
|
t |
1 |
|
t |
1 |
|
t |
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
лов по времени их поступления.
Когда в систему поступают входные и управляющие сигналы, со-
стояние детерминированной системы без последействия зависит от (t,xl)T и
(t,uM)T.
93

С учетом этого оператор переходов приобретает вид: |
|
|||||||||||
|
z(t)=H{t,t ,z(t ), (t,x ,u |
M |
]t }. |
(11.1) |
||||||||
|
|
|
|
|
0 |
|
0 |
|
L |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
Нередко также используется другая форма записи оператора перехо- |
||||||||||||
дов: z(t)= H{t,t ,z(t |
), (t,x |
L |
]t |
|
, (t,u |
M |
]t |
}, что соответствует отображению |
|
|||
0 0 |
|
t |
0 |
|
t |
0 |
|
|
|
|
||
{(t,t0)} |
|
Z |
{(t,xL)T} |
{(t,uM)T} Z. |
(11.2) |
|||||||
Таким образом, при помощи (11.1) и (11.2) описываются детермини-
рованные системы без последействия с обычными входными и управляю-
щими сигналами.
94
Глава 12. Детерминированные системы с последействием
Большой класс систем характеризуется тем, что для определения их состояния в момент времени t>t0 недостаточно знать состояние z(t0) в мо-
мент t0. Для этой цели приходится задавать состояние системы на некото-
ром начальном множестве моментов времени t |
|
|
T, таких, что t t0. |
|
|||||||||||||||||||||||
|
Каждому t0 |
|
T становится в соответствие некоторый класс множеств |
||||||||||||||||||||||||
B0 T, таких, что |
|
t |
|
B0 {B} t |
справедливо t<t0. |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда получается параметрическое (с параметром t0 T) семейство |
||||||||||||||||||||||||||
({B} t |
) классов {B} t |
|
множеств B0, обладающих указанным свойством. На |
||||||||||||||||||||||||
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
каждом B0 |
({B} t |
) задается множество { (t)} B |
|
отображений B0 |
Z, обо- |
||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
значаемых z= (t),t |
B0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Совокупность упорядоченных пар (t B |
0 |
,z |
|
|
), где t B |
0 |
B0, z = |
(t), для |
||||||||||||||||||
этих t называется предысторией (t B |
,z ) t |
системы с последействием. |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
Оператор переходов |
H этой системы для любых t |
T и t0 |
T, t>t0 и |
|||||||||||||||||||||||
любых z(t0) |
Z и (t,xL)T {(t,xL)T} имеет вид |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
z(t)=H{t, (t |
B |
|
,z |
) |
t |
|
,t ,z(t ), (t,x |
L |
]t |
|
|
}. |
|
|
(12.1) |
|||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
0 |
0 |
|
t |
0 |
|
|
|
|
|
||||
|
Оператор переходов (12.1) детерминированной системы с последей- |
||||||||||||||||||||||||||
ствием реализует отображение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
{(t,t0)} { (t B |
0 |
,z |
) t |
0 |
} |
Z |
{(t,xL)T} |
Z. |
|
|
(12.2) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Здесь {(t B |
,z |
) t |
} – параметрическое (с параметром t0 T) семейство |
|||||||||||||||||||||||
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
множеств всевозможных предысторий системы. В случае конечного B0, например, (t1,t2,..tk), предыстория имеет вид [t1,z (t1); t2,z (t2);.. tk,z (tk)], а оператор переходов:
z(t)=H{t,t1,z (t1); t2,z (t2); ..tk,z (tk),t0,z(t0), (t,xL ]tt0 }.
95
Глава 13. Стохастические системы
Системы, функционирующие под воздействием случайных факто-
ров, называются стохастическими. В теории стохастических систем суще-
ственную роль играет понятие случайного оператора. |
|
|
Пусть |
– пространство элементарных событий с вероятностной |
|
мерой P(A); x |
X и z Z – заданные множества, а {X |
Z} – множество ото- |
бражений X в Z. |
|
|
Относительно множества Z и отображений X |
Z следует считать |
|
выполненными некоторые весьма общие требования измеримости. Слу-
чайным оператором H1, переводящим множество X во множество Z, назы-
вается оператор z=H1(x, |
), реализующий отображение множества |
во |
||
множество {X Z}. |
|
|
|
|
Это означает, что каждому фиксированному |
ставится в соот- |
|||
ветствие некоторый конкретный неслучайный оператор |
H(x, |
), реали- |
||
зующий отображение X |
Z. |
|
|
|
Таким образом H1(x, ) определяет набор отображений X |
Z, зави- |
|||
сящих от элементов |
. С другой стороны, очевидно, что каждому x |
X |
||
случайный оператор H1(x, ) ставит в соответствие не одно определенное z Z, а некоторое множество Z* Z с распределением вероятностей на нем,
зависящим от P(A) и вида оператора H1.
С учетом сказанного, операторы переходов и выходов стохастиче-
ской системы без последействия можно представить в виде: |
|
||||||||
z(t)=H {t,t |
,z(t |
, |
0 |
), (t,x |
L |
]t |
}, |
}, |
(13.1) |
1 0 |
0 |
|
|
t |
|
|
|
||
|
|
|
|
|
|
0 |
|
|
|
y(t)=G1{t,z(t), |
}. |
|
|
(13.2) |
|||||
где 0, , – независимо выбираются из |
|
в соответствии с вероятност- |
|||||||
ными мерами P0(A), Pz(A) и Py(A). |
|
|
|
|
|
|
|
||
96
При фиксированных  и
и  стохастическая система называется сис-
стохастическая система называется сис-
темой со случайными начальными состояниями. Когда фиксированы 0 и
 , стохастическую систему называют системой со случайными перехода-
, стохастическую систему называют системой со случайными перехода-
ми, при фиксированных 0, – системой со случайными выходами. Рас-
– системой со случайными выходами. Рас-
пределение вероятностей для y(t) зависит от Py(A) и вида оператора G1.
Аналогичный вид имеют операторы переходов и выходов для сто-
хастической системы с последействием. Движение стохастической систе-
мы можно рассматривать как некоторый случайный процесс z(t, ) с обла-
стью значений в множестве состояний системы Z.
97
Глава 14. Агрегативное описание систем
Предположения о характере множеств состояний и сигналов, опера-
торов переходов и выходов, принятые ранее, оказываются слишком широ-
кими. Они не обеспечивают построения эффективного аналитического ап-
парата для анализа и синтеза сложных систем.
Поэтому на множества состояний, сигналов, а также на операторы переходов и выходов налагаются дополнительные ограничения. В частно-
сти, рассматривается унифицированная схема, называемая агрегатом, ко-
торая получается из стохастической системы общего вида конкретизацией операторов переходов и выходов.
14.1. Понятие «агрегат» в теории систем
Пусть T – фиксированное подмножество действительных чисел
(множество рассматриваемых моментов времени), X,U,Y,Z – множества любой природы. Элементы указанных множеств: t T – момент времени; x X – входной сигнал; u U – управляющий сигнал; y Y – выходной сиг-
нал; z Z – состояние. Состояния, входные, управляющие и выходные сиг-
налы, рассматриваемые как функции времени, обозначаются z(t), x(t), u(t) и y(t).
Под агрегатом понимается объект <T,X,U,Y,Z,H,G>, где H, G – опе-
раторы (вообще говоря, случайные). Операторы переходов и выходов H и G реализуют функции z(t) и y(t). Структура этих операторов, собственно,
и выделяет агрегаты среди прочих систем.
Предположение 1. Предполагается, что за конечный интервал време-
ни в агрегат поступает конечное число входных и управляющих сигналов и вырабатывается конечное число выходных сигналов.
98
14.2. Операторы переходов и выходов агрегата
Операторы переходов. Наряду с состоянием z(t) рассматриваются
также точки z(t+0). Предположим, что для любого t1>t момент (t+0) (t,t1].
Вид оператора H зависит от того, содержит ли рассматриваемый интервал
времени моменты особых состояний агрегата или не содержит. Под осо-
быми состояниями понимаются его состояния в момент получения входно-
го либо управляющего сигналов или выдачи выходного сигнала. Все ос-
тальные состояния агрегата называются неособыми.
Предположение 2. Из особых состояний агрегат может переходить в
новое состояние скачком.
Пусть z(t*) – некоторое особое состояние агрегата, а us – последний
управляющий сигнал us U, обозначения для операторов, |
являющихся ча- |
стными видами оператора H и определяющих состояние агрегата в момент |
|
t*+0. Тогда: |
|
Если t* – момент поступления входного сигнала x, то |
|
z(t*+0)=V [z(t*),x,us]; |
(14.2) |
Если t* – момент поступления управляющего сигнала u, то |
|
z(t*+0)=V [z(t*),u]; |
(14.3) |
При одновременном поступлении x и u |
|
z(t*+0)=V [z(t*),x,u]; |
(14.4) |
Если t* – момент выдачи выходного сигнала y, то |
|
z(t*+0)=W[z(t*),us]. |
(14.5) |
В интервале между особыми состояниями значение z(t) определяет-
ся при помощи операторов U, вид которых в общем случае зависит от осо-
бого состояния, являющегося для данного интервала времени начальным состоянием:
z(t*+0)=U t |
[t,z(t*+0),us]. |
(14.6) |
|
s |
|
99
где t* – момент особого состояния, являющегося исходным для данного интервала времени.
Естественно, замечания о том, что H является случайным операто-
ром, без изменений переносится на его частные виды U,V ,V ,V и W.
,V и W.
Оператор выходов. Во множестве Z состояний z(t) агрегата выделя-
ется класс подмножеств {Zy}, обладающих следующими свойствами. Вы-
ходной сигнал y выдается в момент t тогда, когда: 1) z(t ) Zy; z(t –0) Zy и
тогда, когда: 1) z(t ) Zy; z(t –0) Zy и
2) z(t +0) Zy, но z(t’) Zy. Тогда оператор G можно |
представить в виде со- |
вокупности двух операторов: G , вырабатывающего выходной сигнал |
|
y=G [z(t ),us], |
(14.7) |
и G , проверяющего для каждого t принадлежность z(t) к одному из под-
, проверяющего для каждого t принадлежность z(t) к одному из под-
множеств Zy.
Необходимо заметить, что в общем случае, оператор G является случайным оператором. Это значит, что данным t,z(t),u ставится в соответ-
является случайным оператором. Это значит, что данным t,z(t),u ставится в соответ-
ствие не одно определенное значение выходного сигнала, а некоторое множество значений y с соответствующим распределением вероятностей,
задаваемых оператором G .
В некоторых случаях в качестве одной из составляющих z(t), напри-
мер, z1(t), можно рассматривать время, оставшееся до выдачи выходного сигнала. Тогда оператор G проверяет неравенство z1(t)>0.
проверяет неравенство z1(t)>0.
Процесс функционирования агрегата. В начальный момент време-
ни t0 заданы начальное состояние агрегата z0 и начальное значение управ-
ляющего сигнала u0.
Пусть t1 и t2 – моменты поступления первого x1 и второго x2 входных сигналов, 1 – момент поступления первого управляющего сигнала u1 и,
для определенности t1< 1<t2. Рассматривается полуинтервал (t0,t1]. Состоя-
ния агрегата изменяются с течением времени по закону z(t)=U t0 [t,z0,u0] (t0<t t1) до тех пор (оператор G ), пока в момент t
), пока в момент t (пусть t <t1) состояние
(пусть t <t1) состояние
100