

Полученные точки с и s2 на плане соединяют прямыми с полюсом. Отрезки (рc) и (рs2 ) плана – vC и vS2 соответственно.
Скорость точки D определяют из двух векторных уравнений
vD = vC + vDC , vD = vO1 + vDO1, vO1 = 0 .
На плане через точку с проводят л. д. vDC CD, а через точку о1 – л. д. vDO1DО1. Пересечение линий действия – точка d на плане. Отрезок ( pd ) плана – vD . Положение точки е на плане определяют из пропорции
lDO |
|
|
|
|
|
|
|
|
l |
|
× ( |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
pd |
|
|
|
|
||||
= |
|
|
pd |
|
|
|
EO1 |
|
0,16 × 94 |
|
|
||||||
|
|
|
|
|
|
|
|
||||||||||
1 |
|
|
|
|
, pe = |
|
|
|
|
= |
= 47 |
мм. |
|||||
lEO |
|
|
|
|
|
lDO |
0,32 |
||||||||||
|
pe |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Отрезок ( pe ) откладывают от полюса вверх на продолжении л. д. vD .
Для определения скорости точки F записывают уравнение vF = vE + vFE , а на плане через точку е проводят л. д. vFE FE, а через полюс – vF параллельно оси левого цилиндра. Обе линии продолжают до взаимного пересечения в точке f точке плана. Отрезок прямой (pf ) плана – vF .
Угловые скорости звеньев
ω 2 |
= |
v |
BA = |
53,5× 0,22 |
= 14,01 |
с–1, |
w 5 = |
vDO |
= |
94,5× 0,22 |
= 64,97 с–1, |
||||||
|
|
|
|
1 |
|
|
|||||||||||
l |
|
|
0,84 |
lDO |
0,32 |
|
|||||||||||
|
|
BA |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
|
ω 4 |
|
= |
vDC = |
1,5× 0,22 |
= 1,14 |
с–1, |
ω 6 = |
vFE = |
8,5× 0,22 |
= 3,89 |
с–1. |
|||||
|
|
|
|
|
lDC |
0,29 |
|
|
|
|
lFE |
|
0,48 |
|
|
|
|
Значение линейных скоростей точек звеньев механизма определяют как
например, vB = |
( |
|
|
)× m v . Значения скоростей точек звеньев сведены в таблицу 1. |
||||||||||
pв |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Точки |
О |
|
|
|
А |
В |
С |
D |
O1 |
E |
F |
S2 |
|
|
v, м/с |
0 |
|
21,98 |
21,23 |
20,79 |
20,79 |
0 |
10,12 |
9,46 |
20,9 |
|
||
51

План ускорений
Ускорение точки А кривошипа
2 |
|
æ |
p n1 |
ö 2 |
æ |
p × 1000 |
ö 2 |
2 |
|
aA = w 1 |
× lOA = |
ç |
|
÷ |
× lOA = ç |
|
÷ |
× 0,21= 2302 м/с . |
|
30 |
30 |
||||||||
|
|
è |
ø |
è |
ø |
|
План ускорений строится с учетом масштабного коэффициента ускорений
μ a = |
|
aA |
= |
2302 м с2 |
= 28,77 |
м с2 |
, где ( |
|
) отрезок на плане, изображающий a A . |
||
|
pa |
||||||||||
|
|
|
|
|
|||||||
p1a |
80 мм |
мм |
|||||||||
|
|
|
|
|
|
|
|||||
На плане из полюса откладывают этот отрезок параллельно звену ОА, направляя его к точке О звена ОА.
Для определения ускорения точки В записывают векторное уравнение
aB = aA + aBAn + |
n |
v2 |
(53,5 × 0,22)2 |
|
|
|
aBAτ , где aBA = |
BA |
= |
|
= 164,92 |
м/с2 |
|
|
0,84 |
|||||
|
|
lBA |
|
|
||
и определяют вектор aBAn |
, который пристраивают к точке а плана параллельно |
|||||
звену АВ и к точке А центру относительного вращения звена 2. Через конец этого вектора, проводят л. д. aBAτ ^ВА. В тоже время через полюс проводят л. д. аВ правого цилиндра параллельно оси цилиндра (прямая ОВ). Пересечение линий действия определит на плане точку в.
Положение точек с и s2 на плане определяют из пропорций
|
|
|
|
l |
|
× ( |
|
) |
|
0,588 × 68,5 |
|
|
|
|
|
|
|
|
|
|
|
|
lAS |
|
× ( |
|
|
) |
|
|
|
|
|
||
|
|
|
|
AC |
aв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aв |
|
0,29 × 68,5 |
|
|
|||||||||||
ac = |
|
= |
= 47,95 |
|
мм, as2 = |
2 |
= |
= |
23,6 мм. |
||||||||||||||||||||||||||
|
|
lAB |
0,84 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
lAB |
|
0,84 |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Ускорение точки D можно определить из двух векторных уравнения |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
aDCn + |
|
n |
|
|
v2 |
|
|
|
(1,5 × 0,22)2 |
|
|
|
|
|
|
|
||||||||||
|
|
|
aD = aC + |
aDCτ , где aDC |
= |
|
|
DC |
= |
|
|
|
|
|
|
|
|
|
|
= 0,37 м/с2, |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
0,29 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lDC |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
aD |
= aO |
+ aDOn |
+ aDOτ |
, где aDOn |
|
|
vDO2 |
(94 × 0,22) |
2 |
|
|
м/с2. |
|||||||||||||||||||
|
|
|
|
|
= |
|
|
|
1 |
= |
|
|
|
|
|
|
|
|
|
= 1336,44 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
1 |
|
1 |
1 |
|
|
1 |
|
lDO |
|
|
|
0,32 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Нормальные составляющие ускорений пристраивают на плане: к точке с вектор aDCn úú DC, а к полюсу – вектор aDOn 1 úú DO1. Оба вектора направляют параллельно звеньям и к центру их относительного вращения.
Через концы этих векторов, перпендикулярно к ним проводят л. д. aDCτ
. Точка пересечения л. д. – точка d. Отрезок (p1d ) плана – aD .
52
Положение точки е плана определяют из пропорции
|
|
lEO1 × ( |
|
) |
= |
|
|
|
|
|
= |
p1d |
55,5 × 0,16 |
= 27,75 |
мм. |
||||
p1e |
|||||||||
|
|
|
0,32 |
||||||
|
|
lDO |
|
|
|||||
|
|
1 |
|
|
|
|
|
||
Отрезок (p1e) на плане откладывают от полюса на продолжении л. д. aD . Ускорение точки F определяют из уравнения
|
|
|
|
|
|
|
+ aFEτ , где |
n |
|
vFE2 |
|
|
( |
8,5 × 0,22)2 |
= 7,28 м/с2 |
|||||||||
|
|
aF |
= aE + aFEn |
aFE = |
|
|
|
|
|
= |
|
|
|
|
||||||||||
|
|
|
lFE |
|
|
|
0,48 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
и имея в виду, что л. д. aF |
|
|
поршня 7 параллельна оси цилиндра (линия FO1). |
|||||||||||||||||||||
На плане к точке е пристраивают aFEn |
úú FE и направляя к центру (точка Е) |
|||||||||||||||||||||||
его относительного вращения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Через конец вектора aFEn |
проводят л. д. aFEτ |
^FE и продолжают ее до пере- |
||||||||||||||||||||||
сечения с л. д. aF |
|
поршня 7. Пересечение линий действия определяет на плане |
||||||||||||||||||||||
точку f. Отрезок ( |
|
|
) плана – aF . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
p1 f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Угловые ускорения звеньев |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
e 2 |
= |
aBAτ |
= |
|
(68× 28,77) |
|
= |
2329 с–2, e 5 |
= |
|
aDOτ 1 |
|
= |
(29 × 28,77) |
= 2607,28 с–2, |
|||||||||
lBA |
0,84 |
|
|
|
lDO |
|
0,32 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
aτ |
|
(21× 28,77) |
|
|
|
|
с–2, e |
|
|
= |
aEFτ |
= |
(21,5× 28,77) |
= 1288,66 с–2. |
|||||||||
e 4 = |
|
DC = |
|
|
|
|
|
= |
2083,34 |
6 |
lEF |
|
|
|
|
|||||||||
|
|
0,29 |
|
0,48 |
|
|||||||||||||||||||
|
lDC |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Значение линейных ускорений точек звеньев механизма определяют как, например, aB = (p1в)× m a .
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Точки |
|
О |
А |
В |
С |
D |
O1 |
E |
F |
S2 |
|
|
|
а, м/с2 |
|
0 |
2302 |
978,18 |
1179,57 |
1611,12 |
0 |
|
805,16 |
733,63 |
1354,8 |
|
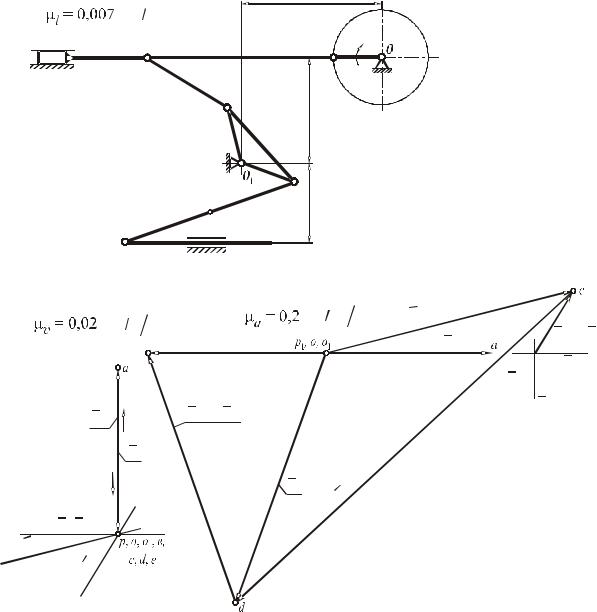
Задача № 22. Восьмизвенный механизм с низшими парами (рис. 32) |
|
|
|||||||||||
|
Исходные данные: lOA = 0,1 м; lAВ = 0,39 м; lВС = 0,2 |
м; lCO1 = lDO1 = 0,12 м; |
|||||||||||
|
|
lCD = 0,21 м; lЕD = 0,36 м; x = 0,30 м; y = 0,22 |
м; y1 = 0,17 м; w1 = 10 с–1. |
||||||||||
Определить скорости и ускорения всех точек звеньев механизма, построив планы скоростей и ускорений.
53

План механизма
План механизма строят по данным параметрам кинематической схемы с
учетом масштабного коэффициента длины |
m l = |
|
lOA |
= |
|
0,1 м |
= 0,007 |
м |
, |
|
|
|
14 мм |
мм |
|||||||
OA |
||||||||||
|
|
|
|
|
|
|||||
где ОА = 14 мм – отрезок на плане, изображающий длину начального звена ОА.
План скоростей
Скорость точки А звена ОА: vA = w 1 × lOA = 10×0,1 = 1 м/с.
Из полюса (точка р) плана перпендикулярно звену 1 в направление действия
угловой скорости w1 |
откладывают отрезок ( ра ) = 50 |
мм, изображающий на |
|||||
плане вектор vA . Тогда масштабный коэффициент скорости |
|||||||
|
|
μ v = |
v A |
= |
1 м c |
= 0,02 м c |
|
|
|
|
|
|
|||
|
|
|
ра |
50 мм |
мм . |
|
|
Для |
определения |
скорости |
точки В |
записывают |
векторное уравнение |
||
vB = vA + |
vBA и полагают, что скорость точки В звена 3 линией действия парал- |
||||||
лельна направляющим звена 3. На плане через точку а проводят л. д. vВА^ВА, а через полюс плана – прямую л. д. vB3 , как сказано выше. Поскольку, в данном случае звенья 1, 2, 3 располагаются на одной прямой, точка в плана окажется в полюсе, то есть vB = 0, а vBA = – vA .
Для определения скорости точки С записывают два векторных уравнения
vC = vB + vCB , vC = vO1 + vCO1 ,
На плане через точку в проводят л. д. vCВ^CB, а через полюс плана – л. д. vCO1 ^CО1. На плане точка с оказывается в полюсе, vC = 0.
54
План механизма |
|
|
|
|
x |
|
|
|
|
м мм |
|
|
|
|
|
|
|
3 |
B |
|
|
2 |
|
A |
ω |
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
C |
y |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
S6 |
6 |
|
|
|
|
|
E |
|
|
|
|
y1 |
|
|
|
|
|
|
|
7 |
|
|
|
План скоростей |
|
|
|
План ускорений |
|
|||
|
|
|
|
(м c2) мм |
||||
|
(м c) мм |
|
|
|
|
|||
|
|
|
aE |
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vBA |
a |
ED |
= a τ |
|
|
|
||
|
|
ED |
|
|
|
|||
vA
л.д. vB, vE
|
. |
д |
. |
v |
л |
|
|||
|
|
|||
|
|
|
|
Рис. 32
aC
=
 τ aCO1
τ aCO1
aCB = aCBτ



 л.д.aB3
л.д.aB3
Для определения скорости точки D необходимо на плане (отрезок CО1) по-
строить |
cdo1 подобный и сходственно расположенный CDO1. Но отрезка CО1 |
на плане нет, точка d находится в полюсе и vD = 0. |
|
Для |
определения скорости точки Е записывают уравнение vE = vD + vED и |
считают известной л. д. vE7 . На плане через полюс проводят л. д. vE7 параллельно направляющим звена 7. Через точку d плана, а она в полюсе,
55
необходимо провести л. д. vED^ED. Пересечение этих линий действия происходит в полюсе и vE = 0.
План ускорений |
|
|
|
|
|
|
|
|
|
|||||||||||
Ускорение точки А: aA = |
w 12 × lOA = 102×0,1 = 10 м/с2. |
|
|
|||||||||||||||||
Для построения |
|
плана ускорений принимают масштабный коэффициент |
||||||||||||||||||
ускорений μ a = |
|
|
aA |
= |
10 м с2 |
= 0,2 |
м с2 |
, |
|
|
|
|||||||||
|
|
|
|
|
|
50 мм |
мм |
|
|
|
||||||||||
|
|
p1a |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где отрезок ( |
|
|
) представляет на плане вектор aA . |
|
|
|||||||||||||||
p1a |
|
|
||||||||||||||||||
Далее |
записывают |
векторное |
уравнение |
aB = aA + aBAn + aBAτ , |
где |
|||||||||||||||
n |
v2 |
(1)2 |
|
|
|
|
|
|
|
м/с2. |
|
|
|
|
|
|
|
|||
aBA = |
BA |
= |
|
|
|
= 2,56 |
|
|
|
|
|
|
|
|
||||||
|
0,39 |
|
|
|
|
|
|
|
|
|
||||||||||
|
lBA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Вектор |
aBAn пристраивают на плане к точке а, направляя его параллельно |
|||||||||||||||||||
звену ВА и к центру вращения звена ВА. Через конец этого вектора проводят л. д. aBAτ ^АВ. Через полюс плана – л. д. aB3 , параллельно направляющим звена 3. Пересечение этих линий действия – точка в плана. Отрезок (p1в) плана – aB .
Ускорение точки С плана определяют из двух векторных уравнений
aC = |
aB + aCBn |
+ aCBτ |
, где aCBn = |
vCB2 |
= 0 м/с2, так как vCВ = 0, |
||||||
|
lCB |
||||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
vCO2 |
|||
aC = aO |
|
+ aCOn |
+ |
aCOτ |
, где aCOn 1 = |
|
|
|
1 |
= 0 м/с2, так как vCO = 0. |
|
|
|
lCO |
|
||||||||
1 |
1 |
|
1 |
|
|
|
1 |
||||
|
|
|
|
|
|
|
|
|
|
||
Через полюс плана проводят л. д. aCOτ |
= aCO1 , перпендикулярно звену СО1, а |
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
через точку в плана л. д. aCBτ |
= aCB , перпендикулярно звену ВС и продолжают |
||||||||||
до взаимного пересечения точке с плана. Отрезок прямой, соединяющий точки р1 и с – aC .
Для нахождения точки d на плане можно воспользоваться правилом подобия, то есть на отрезке о1с плана строят Dо1сd подобный и сходственно расположенный DО1СD на плане механизма. Отрезок (p1d ) плана – aD .
56
Ускорение точки Е определяют из векторного уравнения
aE = aD + aEDn + aEDτ , где aEDn = |
vED2 |
= 0 м/с2, так как vED = 0. |
|
lED |
|||
|
|
На плане через точку d проводят л. д. aEDτ ED и через полюс л. д. aE . Отрезок ( pe ) плана – aE .
Для определения численных значений линейных скоростей и ускорений точек звеньев механизма необходимо отрезки планов скоростей и ускорений умножить на соответствующие масштабные коэффициенты скорости и ускорения.
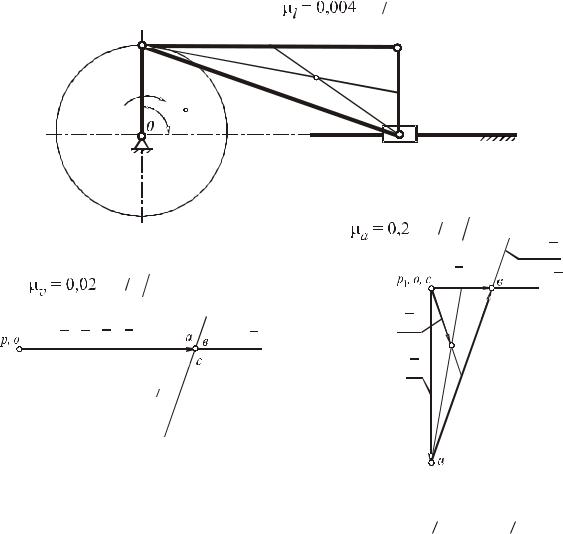
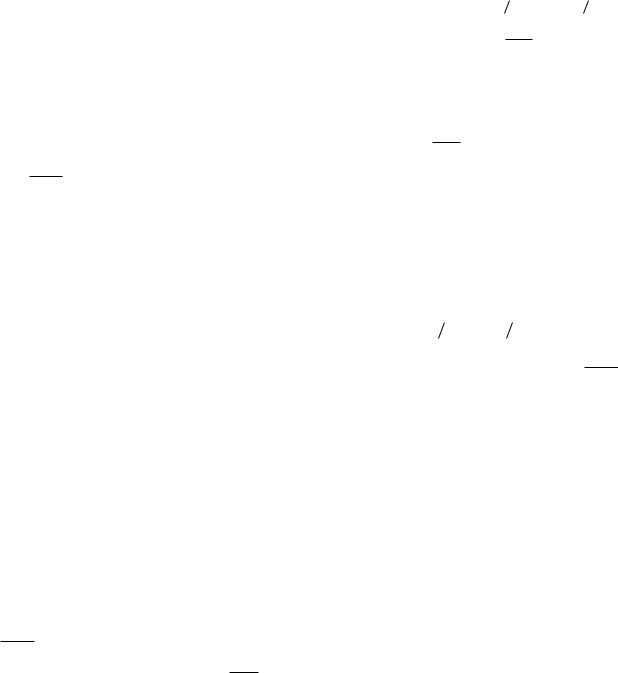
Задача № 23. Кривошипно-ползунный механизм (рис. 33)
Исходные данные: lOA = 0,1 м; lAВ = 0,3 м; lВС = 0,1 м; ω1 = 10 с–1.
Построить планы скоростей и ускорений для частного положения механизма. Найти угловую скорость и угловое ускорение звена 2.
План механизма
План механизма построен по заданным параметрам кинематической схемы
с учетом масштабного коэффициента длины μ l = |
lOA |
= |
0,1 м |
= 0,004 |
м |
. |
|||
|
|
|
25 мм |
мм |
|||||
OA |
|||||||||
|
|
|
|
||||||
План скоростей |
|
|
|
|
|
|
|
|
|
Скорость точки А звена 1: v A = w 1 × lOA = 10 × 0,1 = 1 |
м . |
|
|
|
|
|
|||
|
c |
|
|
|
|
|
|||
Вектор скорости точки А откладывают из полюса плана скоростей, перпендикулярно звену 1 в направлении действия ω1 в виде отрезка ра = 50 мм .
57
|
|
План механизма |
|
|
|
м мм |
|
A |
2 |
C |
|
1 |
|
s2 |
|
ω 1 |
|
|
|
90 |
|
B |
|
|
|
3 |
|
|
|
План ускорений |
|
|
|
(м c2) мм |
л.д. aBAτ |
План скоростей |
|
|
|
|
aB |
л.д.aB |
|
(м c) мм |
|
||
|
|
||
vA, vB, vC, vD |
л.д. v |
a |
|
|
|
||
s2 |
B |
|
|
|
aA |
|
|
|
|
|
v . .д л
A B
Рис. 33
Масштабный коэффициент скорости равен μ v = |
vA |
= |
1 м c |
= 0,02 |
м c . |
|
ра |
50 мм |
|||||
|
|
|
мм |
Для определения скорости точки В необходимо записать векторное уравнение vB = vA + vBA и знать л. д. скорости точки В ползуна 3, которая параллельна неподвижным направляющим ползуна. Из точки а на плане проводят л. д. vВА^АВ, а через полюс – vВОïïОВ. Пересечение линий действия происходит в полюсе плана, то есть vB = v A .
Для определения скорости точки с строят Dасв подобный и сходственно расположенный DАСВ на плане механизма. Но на плане скоростей точка а и в совпадают, следовательно и точка с окажется в полюсе. Все точки звена 2 в том числе и точка s2 будут иметь одну скорость, что соответствует мгновенному поступательному движению звена 2.
58
Угловая скорость звена 2 |
ω 2 = |
vBA |
= 0 с–1, так как vВА = 0. |
|
|||
|
|
lBA |
|
План ускорений
Ускорение точки А: aA = w 12 × lOA = 102×0,1 = 10 м/с2.
Из полюса плана откладывают вектор aA в виде отрезка ( p1a) , направляя его параллельно звену 1 и к центру вращения звена 1 (точка О).
|
|
aA |
|
10 м с2 |
|
м с2 |
|
Масштабный коэффициент ускорений μ a = |
|
|
|
= |
50 мм |
= 0,2 |
мм . |
|
|
|
|||||
p a |
|||||||
|
|
1 |
|
|
|
|
|
Для определения ускорения точки В звена 2 записывают векторное урав-
|
aB = aA + aBAn + aBAτ , где aBAn = |
v2 |
|
нение |
BA |
= 0 м/с2. |
|
|
|||
|
|
lBA |
|
На плане через точку а проводят л. д. aBAτ ^АВ, а через полюс – л. д. aB ползуна, параллельно направляющим ползуна (прямая ОВ). В пересечении этих линий действия – точка в. Отрезок плана – aB , а отрезок плана –
aBAτ = aBA .
Точку с плана определяют по правилу подобия: на отрезке (aв)плана строят Dасв подобный и сходственно расположенный DАСВ на плане механизма. В данном случае точка с оказывается в полюсе плана. Положение точки s2 звена 2
определится, если в Dасв плана провести медианы. Отрезок |
( |
|
|
) |
плана – |
aS |
2 . |
||||
p s |
2 |
||||||||||
1 |
|
|
|||||||||
Угловое ускорение звена 2: e 2 = |
aBAτ |
(52 × 0,2) |
= 34,67 |
с–2. |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|||
0,3 |
|
|
|
|
|
|
|
||||
|
lBA |
|
|
|
|
|
|
|
|
|
|
Задача № 24. Синусный механизм (рис. 34)
Исходные данные: lOA = 0,1 м; w1 = 10 с–1.
Построив планы скоростей и ускорений, определить скорость и ускорение звена 3 механизма.
59

План механизма
Масштабный коэффициент длины, выбранный для построения плана меха-
|
|
lOA |
|
0,1 м |
|
м |
|
|
|
|
|||
низма |
μ l = |
= |
= 0,005 |
, где OA |
– отрезок на плане механизма, соот- |
||||||||
|
|
|
20 мм |
мм |
|||||||||
OA |
|||||||||||||
|
|
|
|
|
|
|
|
||||||
ветствующий длине звена 1.
|
План механизма |
3 |
м мм |
x |
A x |
|
2 |
1 |
ω 1 |
|
45 |
План скоростей |
План ускорений |
||
|
(м c2) мм |
||
|
(м c) мм |
|
|
|
vA3A2 |
aA1 |
= aA2 |
|
|
||
v |
vA3 |
|
aA3 |
vA1 |
|
|
|
|
|
r |
|
|
|
|
aA3A2 |
Рис. 34
План скоростей
Точка А, принадлежащая звену 1 – А1, звену 2 – А2, звену 3 – А3. Скорости точек А1 и А2: vA1 = vA2 = w 1 × lOA = 10× 0,1 = 1 м c .
c .
60
Для |
определения скорости точки А3 записывают векторное |
уравнение |
|||||
vA3 = vA2 |
+ vA3A2 . Линия действия скорости точки А3^xx , а относительной скоро- |
||||||
сти vA3 A2 ïïxx. |
|
|
|
|
|
|
|
Выбирают масштабный коэффициент скорости |
μ v = |
vA |
= |
1 м c |
= 0,02 м c . |
||
|
|
||||||
|
|
|
ра |
50 мм |
мм |
||
Из полюса плана скоростей (точка р) откладывают отрезок (pa1 ), изображающий на плане vA1 , направляя его перпендикулярно звену ОА в сторону действия w1. Через полюс проводят л. д. vA3 , а через точку а – л. д. vA3 A2 . В пересечении этих линий действия – точка а3 плана. Отрезок (pa3 ) плана – vA3 , а отрезок (a1a3 ) плана – vA3 A2 .
Значение vA3 = ( pa3 ) × m v = 36,5×0,02 = 0,73 м/с. |
|
|
|
|
|
|
|
||||||
План ускорений |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ускорение точек А1 и А2: |
aA |
= aA = w 12 |
× lOA = 102×0,1 = 10 м/с2. |
|
|||||||||
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
Масштабный коэффициент ускорений |
μ a = |
|
a |
A |
= |
10 м с2 |
= 0,2 |
м с2 |
. |
||||
|
|
|
|
50 мм |
мм |
||||||||
p1a |
|||||||||||||
|
|
|
|
|
|
|
|
||||||
Из полюса (точка р1), параллельно звену 1, откладывают отрезок ( p1a1) = 50 мм, изображающий на плане aA1 , направляя его к центру вращения звена 1.
Для |
определения |
ускорения точки А3 записывают векторное |
уравнение |
|
aA3 = aAn3 |
+ aAτ 3 = aA2 |
+ aAr3A2 |
+ aAk3A2 и кроме того, полагают, что, л. д. aA3 параллельна |
|
направляющим |
звена 3. Ускорение Кориолиса aAk3A2 = 2vA3A2 × w 3 = |
0, так как |
||
w3 = 0. На плане через полюс проводят л.д. aA3 , а через точку а1 – плана л. д. aAr3 A2 ïï xx. В пересечении этих линий действия – точка а3 на плане. Отрезок ( p1a3 ) плана – aA3 .
Численное значение aA3 = ( p1a3 )μ a = 34,5×0,2 = 6,9 м/с.
Задача № 25. Кулисно-рычажный механизм (рис. 35)
Исходные данные: lOA = 0,14 м; lAС = lCO1 = 0,43 м; x = 0,43 м; x1 = 0,18 м; y = 0,42 м; j = 40°; w1 = 10 с–1.
61