

Линейная, векторная алгебра. Аналитическая геометрия Конспект лекций Часть 1 Николаева
.pdfуравнения (3.26) линейны относительно x и y, поэтому будем говорить, что (3.26) определяют линейное преобразование плоскости в себя.
|
|
|
|
|
, которая называ- |
Преобразование (3.26) определяется матрицей T |
11 |
|
12 |
|
|
|
21 |
22 |
|
|
|
ется |
матрицей |
линейного преобразования. |
Обозначая |
|
|
|
x |
|
|
|
x |
|
|||||||
X |
, |
|
X |
|
, |
||||||||||||||
(3.26) можно переписать в виде X TX . Можно показать, |
|
y |
|
|
|
y |
|
||||||||||||
что определитель |
|||||||||||||||||||
T |
равен коэффициенту изменения площадей при линейном преобразовании |
||||||||||||||||||
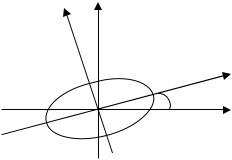
(3.26). При этом |
T 0, если в результате преобразования направление обхода |
||||||||||||||||||
некоторого контура не меняется, |
и T 0, если оно меняется на противопо- |
||||||||||||||||||
ложное. Поясним это на примерах. |
|
x 2x |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
– растяжение вдоль |
|
|
|||||||||||
|
|
|
|
|
ПРИМЕР. |
y |
|
|
|||||||||||
|
Y |
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
0 |
|
|
|
|
|
|
|
||
|
|
|
|
|
оси OX в 2 раза. |
T |
|
T 2. |
|
|
|||||||||
|
A |
A |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
0 |
|
1 |
|
|
|
|
|
|
|
||||
|
|
|
|
X |
T |
|
|
|
|
|
2S |
|
|
(рис. 40). |
|||||
|
О |
B |
|
|
OAB OAB , S |
|
|
||||||||||||
|
|
|
|
|
OA B |
|
|
|
OAB |
|
|
|
|
||||||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Рис. 40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПРИМЕР. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
2 |
0 |
|
|
|
|
|
|
|||
|
|
|
Y |
|
x 2x |
T |
T 4. |
||||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|||||||||
|
|
|
|
|
y 2y |
|
|
|
|
|
2 |
|
|
|
|
|
|
||
|
A |
|
|
|
|
T |
|
|
|
|
|
S |
|
|
4S |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
A |
OAB OAB , |
OAB |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
OA B |
|
|
|
|
|
|||
|
|
|
|
|
при этом направление обхода OAB |
||||||||||||||
|
|
|
|
|
X от O к A, затем к B – по часовой |
|
|||||||||||||
|
|
О |
B |
стрелке, а соответствующее направ- |
|||||||||||||||
|
B |
|
|||||||||||||||||
|
|
|
|
|
ление обхода |
|
|
|
|
|
|
|
|
|
|
||||
|
Против часовой |
По часовой |
OA B |
– против ча- |
|
||||||||||||||
|
совой стрелки. Геометрически дан- |
||||||||||||||||||
|
стрелки |
|
|
стрелке |
|||||||||||||||
|
|
|
ное преобразование – растяжение |
|
|
||||||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
вдоль OX и OY в 2 раза и отраже- |
||||||||||||||
|
|
|
Рис. 41 |
ние симметрично относительно оси |
|||||||||||||||
|
|
|
|
|
OY (рис. 41). |
|
|
|
|
|
|
|
|
|
|
|
|||
|
ОПРЕДЕЛЕНИЕ. Линейное преобразование (3.26) называется невыро- |
||||||||||||||||||
жденным, если |
T 0. |
|
|
|
|
T 1 |
|
|
|
|
|
|
|
|
|
||||
|
В этом |
случае |
существует |
обратная |
матрица |
|
|
и |
можно |
найти |
|||||||||
X T 1X . То есть, если T 0, то не только у каждого прообраза существует
61

единственный образ, но и наоборот: для каждого образа существует единственный прообраз. В этом случае говорят, что (3.26) устанавливает взаимно однозначное соответствие между точками плоскости, или линейное преобразование плоскости на себя.
Можно показать, что невырожденное линейное преобразование переводит прямую в прямую, а кривую второго порядка – в кривую второго порядка.
|
1 |
1 |
|
|
|
x x y |
, T 0 преобразование вы- |
||||
ПРИМЕР. Пусть |
T |
2 |
2 |
|
|
y 2x 2y |
|
|
|
||
рожденное.
Какими будут образы точек, лежащих, например, на прямой x y 1 0
(рис. 42)? |
|
|
|
Y |
|
|
Y |
|
T |
|
|
|
|
M2 |
M1 |
|
|
|
N1,N2,N3 |
|
1 |
|
2 |
|
|
||
О |
1 |
X |
|
1 |
X |
|
O |
|
|||||
|
M3 |
x y 1 0 |
|
|
|
|
|
|
|
|
|
|
Рис. 42
Очевидно, что если x y 1, то x 1,y 2, то есть у точки N 1,2 суще-
ствует бесконечное множество прообразов: все они лежат на прямой x y 1 0. Потому данное вырожденное линейное преобразование не устанавливает взаимно-однозначного соответствия между точками плоскости.
ПРИМЕР. Рассмотрим формулы (3.25):
|
cos |
sin |
|
|
x xcos ysin |
, T 1. |
|||
|
,T |
sin |
|
|
y xsin ycos |
|
cos |
|
|
Очевидно, что поворот осей пдск на угол – линейное преобразование. Так как это линейное преобразование невырожденное, то существует
T 1 |
cos |
sin |
|
. |
|
|
sin |
cos |
Заметим, что в этом случае T 1 TT .
ОПРЕДЕЛЕНИЕ. Матрица A называется ортогональной, если A 1 AT . Линейное преобразование, матрица которого ортогональна, называется орто-
гональным.
62

Таким образом, поворот координатных осей – ортогональное линейное преобразование.
Можно показать, что если A – ортогональная матрица, то A 1 (доказать са-
мостоятельно). Таким образом, в результате ортогональных линейных преобразований на плоскости площади фигур остаются неизменными.
ПРОИЗВЕДЕНИЕ ЛИНЕЙНЫХ ПРЕОБРАЗОВАНИЙ
|
|
|
|
|
|
|
|
|
|
. Каждая из них оп- |
Рассмотрим матрицы B |
11 |
12 |
|
и C |
|
11 |
|
12 |
|
|
|
21 |
22 |
|
|
21 |
22 |
|
|
||
ределяет линейное преобразование плоскости. Если M x,y – некоторая точка плоскости, то под действием линейного преобразования X BX с матрицей B
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
она перейдет в точку N x,y |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
x |
|
|
x |
|
y |
(3.27) |
||||
|
|
|
|
|
11 |
|
|
12 |
|
. |
|||
|
|
|
y 21x 22 y |
|
|||||||||
В свою очередь точка N под действием линейного преобразования X CX с |
|||||||||||||
матрицей C |
|
|
|
y |
|
: |
|
|
|
|
|
||
перейдет в точку P x , |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
x |
11 |
x |
12 |
. |
(3.28) |
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
y 21x 22 y |
|
|||||||||
Такое последовательное выполнение линейных преобразований называется их
произведением: X C BX CB X .
Покажем, что произведение линейных преобразований также линейное преобразование, и найдем его матрицу. Подставим (3.27) в (3.28):
x 11 11x 12 y 12 21x 22 y 11 11 12 21 x 11 12 12 22 y, y 21 11x 12 y 22 21x 22 y 21 11 22 21 x 21 12 22 22 y.
То есть
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
y |
|
x |
11 |
12 |
21 |
11 |
12 |
22 |
|
|||||||||
|
|
|
11 |
|
|
12 |
|
|
|
(3.29) |
||||||
|
|
|
21 11 22 21 x 21 12 22 22 y |
|||||||||||||
y |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.29) – система линейных уравнений, а потому произведение линейных преобразований линейно. Матрица (3.29) имеет вид:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C B. |
|
|
11 11 |
|
12 |
|
21 |
|
11 12 |
|
12 |
|
22 |
|
|
|
11 |
|
12 |
|
11 |
12 |
|
|
|
21 11 |
22 21 |
21 12 |
22 22 |
|
21 |
22 |
|
21 |
22 |
|
|
|||||||||||
63
Таким образом, матрица произведения линейных преобразований равна произведению их матриц. Само же правило умножения матриц, сформулированное в гл.1, находит объяснение в этом выводе.
ПРИВЕДЕНИЕ КВАДРАТИЧНОЙ ФОРМЫ К КАНОНИЧЕСКОМУ ВИДУ
ОПРЕДЕЛЕНИЕ. Квадратичной формой относительно двух переменных x и y называется однородный многочлен второй степени:
F x,y a |
x2 2a |
xy a |
22 |
y2 . |
(3.30) |
11 |
12 |
|
|
|
Уравнение a11x2 2a12xy a22 y2 c (c const) задает на плоскости кривую вто-
рого порядка, причем, так как вместе с точкой M x,y , лежащей на этой кри-
вой, ей принадлежит и точка N x, y , кривая симметрична относительно на-
чала координат, то есть является центральной кривой (эллиптического или гиперболического типа).
Предположим, что уравнение a11x2 2a12xy a22 y2 c задает в пдск ХОУ эллипс. Если a12 0, то это уравнение не является каноническим уравнением эллипса, а потому, хотя О(0, 0) – его центр, оси симметрии не совпадают с ОХ и ОУ (рис. 43). Тем не менее, заметим, что если оси системы XOY повернуть на
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эллипс бу- |
|
|
|
|
|
|
|
угол , то в системе X OY |
|
||||||||
Y |
|
|
|
|
дет задаваться каноническим уравне- |
||||||||||
y |
|
|
|
|
|||||||||||
|
|
|
|
|
|
нием: кривая |
симметрична |
относи- |
|||||||
|
|
|
|
x |
|
тельно |
OX |
иOY . |
Найдем |
|
линейное |
||||
|
|
|
|
|
|
преобразование, соответствующее это- |
|||||||||
|
О |
|
|
X |
|
му повороту. |
a11 |
a12 |
|
|
|
|
|||
|
|
|
|
|
Матрица A |
называется |
|||||||||
|
|
|
|
|
|
|
a |
a |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
12 |
22 |
|
|
|
|
||
|
Рис. 43 |
|
|
|
|
матрицей квадратичной формы (3.30). |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пусть |
|
|
|
X |
x |
x |
y . |
|
|
|
|
|
|
||
|
|
|
|
XT |
|
|
|
|
|
|
|||||
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
Вычислим |
XT AX x |
y |
a |
a |
|
x |
a x a y |
|
|
|
|
||||
11 |
12 |
x |
y |
|
11 |
12 |
|
|
|
|
|
||||
|
|
|
a12 |
a22 y |
a12x a22 y |
|
|
|
|
||||||
a11x2 2a12xy a22 y2 F x,y .
Таким образом, квадратичная форма может быть записана в матричном виде:
F x,y XT AX |
(3.31) |
64
|
|
|
|
|
|
|
|
|
|
|
|
|
– координаты |
Пусть x,y – координаты точек плоскости в системе XOY , а x ,y |
|
||||||||||||
|
|
|
|
|
|
|
|
|
, |
где кривая задается каноническим |
|||
точек плоскости в новой системе X OY |
|
||||||||||||
уравнением. Переход от “старых” координат к “новым” будем искать в виде |
|||||||||||||
x |
11 |
x |
|
12 |
y |
X TX . |
|
(3.32) |
|||||
|
|
|
|
|
|
|
|||||||
y 21x 22 y |
|
|
|
|
|
|
|||||||
(3.32) – ортогональное линейное преобразование с матрицей |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
11 |
|
12 |
; |
x |
|
|
|
||||
|
|
|
|
|
X |
. |
|
|
|||||
|
|
21 |
|
22 |
|
|
y |
|
|
||||
По определению ортогональной матрицы |
|
|
|
|
|
|
|||||||
|
|
|
|
TT T 1 |
|
|
|
(3.33) |
|||||
(В результате ортогонального преобразования не происходит изменение площадей фигур, то есть фигуры не деформируются.)
Чтобы узнать, как изменится матрица квадратичной формы в результате линей-
ного преобразования (3.32), подставим (3.32) в (3.31): XT TX T X TTT (свойство 5 умножения матриц) XT AX X T TT AT X A TT AT T 1AT
(свойство 2 умножения матриц и равенство (3.33)) – матрица новой квадратичной формы.
Так как в “новой” системе координат кривая должна задаваться каноническим уравнением, то есть в нем должно отсутствовать произведение коорди-
нат x y, то |
|
|
|
|
r1 |
0 |
|
, где r1,r2 |
– неизвестные числа. Умножим |
||
A |
имеет вид: A |
0 |
r |
|
|||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
AT на матрицу T |
слева. Так как T T |
1 |
E , то получим: |
|||||
равенство A T |
|
|
|||||||||
|
11 |
12 r1 |
0 |
a11 |
a12 11 |
12 |
||||||||||||
TA AT |
|
|
|
|
|
|
0 |
r |
|
|
a |
a |
|
|
|
|
|
. |
|
|
21 |
22 |
|
|
|
|
21 |
22 |
|
||||||||
|
|
|
|
2 |
12 |
22 |
|
|
||||||||||
По определению равных матриц имеем:
|
r a |
11 |
a |
21 |
|
a r |
|
|
11 |
a |
21 |
0 |
||||||||||||||
|
11 1 |
11 |
|
|
12 |
|
|
|
11 |
1 |
|
|
|
12 |
|
|
, |
|||||||||
|
|
r a |
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
21 1 |
12 |
|
|
|
11 22 |
|
21 |
|
|
|
|
a22 |
|
r1 |
21 |
|
0 |
|||||||||
|
|
|
|
|
a12 11 |
|
|
|
|
|||||||||||||||||
|
12 |
r a |
12 |
a |
22 |
|
a r |
|
|
12 |
a |
|
0 |
|||||||||||||
|
|
2 |
11 |
12 |
|
|
11 |
2 |
|
|
|
12 |
22 |
|
. |
|||||||||||
|
|
|
r a |
|
|
|
a |
|
|
|
|
a22 |
|
r2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|||||||||||||||
22 |
2 |
12 |
|
12 |
22 |
|
22 |
|
|
|
|
|
22 |
|
||||||||||||
|
|
|
a12 12 |
|
|
|
|
|||||||||||||||||||
(3.34)
(3.35)
Системы уравнений (3.34), (3.35) – линейные и однородные. Они имеют нетривиальное решение, если их определители равны 0.
0 |
a11 r1 |
a12 |
0, |
a11 r2 |
a12 |
0. |
|
a12 |
a22 r1 |
|
a12 |
a22 r2 |
|
65
Это означает, что r1 и r2 являются решениями уравнения
a11 r |
a12 |
0 |
|
|
A rE |
|
0. |
(3.36) |
|
|
|||||||
a12 |
a22 r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравнение (3.36) называется характеристическим уравнением матрицы A (характеристическим уравнением квадратичной формы). Его решения r1 и r2 на-
зываются собственными значениями матрицы A (квадратичной формы). Покажем, что дискриминант квадратного уравнения (3.36) положителен, то есть любая квадратичная форма двух переменных имеет 2 различных собственных значения.
Вычислим определитель (3.36):
r2 a11 a22 r a11a22 a122 0.
Дискриминант D a11 a22 2 4 a11a22 a122 a11 a22 2 4a122 0,
так как a12 0 (иначе квадратичная форма будет канонической).
Таким образом, коэффициентами при x 2 и y 2 в каноническом виде квадратичной формы являются ее собственные значения, то есть решения уравне-
ния (3.36).
Решим (3.36) и подставим r1 в (3.34). Система имеет бесконечное множе-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|||
|
|
|
|
|
|
|
|
|
X1 |
|||||||||
ство решений и пусть |
|
|
|
|
– одно их них. Так как система (3.34) одно- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
k |
11 |
|
|||||||
родная, то k R |
X |
|
|
|
|
|
|
– тоже решение. Подберем k так, чтобы вектор |
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
k 21 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
был единичным: 112 212 1. |
|||
|
|
, 21 |
k 21 |
|
||||||||||||||
X1 |
11 , 11 k 11 |
|
||||||||||||||||
21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Векторы |
|
1 |
и |
|
X1 |
называется собственными векторами квадратичной |
||||||||||||
X |
|
|||||||||||||||||
формы, соответствующими собственному значению r1 , или первыми собствен-
ными векторами. Их направление называется первым главным направлением
квадратичной формы. Таким образом, первым собственным вектором квадратичной формы называется любое ненулевое решение системы (3.34).
|
|
|
12 |
|
|||
Аналогично подставим r в (3.35) и найдем |
X2 |
||||||
|
|
|
– второй собст- |
||||
2 |
|
|
|
|
|
|
|
|
|
|
22 |
|
|||
венный вектор, соответствующий собственному значению r2 . Его направление называется вторым главным направлением квадратичной формы.
12
X2 , 12 k 12, 22 k 22 – второй единичный собственный вектор, то есть
22
122 222 1.
66
Можно показать, что X1 X2 . Кроме того, |
T |
1 |
|
|
|
|
|
|
1 |
|
|
– пер- |
|||||||||
|
0 |
|
|
|
11 |
|
12 |
|
|
|
11 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
21 |
22 |
0 |
21 |
|
||||||
0 |
|
|
|
|
|
0 |
|
|
|
|
– второй собственный |
||||||||||
вый собственный вектор, а T |
|
|
|
11 |
|
12 |
|
|
|
|
|
12 |
|||||||||
1 |
|
21 |
22 1 |
|
|
22 |
|
|
|
|
|
|
|
||||||||
вектор, поэтому ортами “новой” системы координат X OY , к которой мы пе-
рейдем в результате линейного преобразования с матрицей T , являются еди-
ничные собственные векторы квадратичной формы, найденные как решения систем (3.34), (3.35). Направив оси “новой” системы координат вдоль собственных векторов X1 и X2 , получим систему координат, в которой квадратичная
форма будет иметь канонический вид F x,y r1x 2 r2 y 2 .
ВЫВОД. Чтобы привести квадратичную форму к каноническому виду,
надо:
1.Составить и решить характеристическое уравнение (3.36); его решения
–собственные значения – являются коэффициентами при x 2 и y 2 в каноническом виде квадратичной формы.
2.Найти единичные собственные векторы, решив (3.34) и (3.35); они будут ортами новой системы координат X OY . При этом если ось OX сонаправ-
лена с X1 , а ось OY |
|
– с X |
|
|
r1x |
2 |
r2 y |
2 |
– канонический вид, кото- |
||
|
2 , то F x,y |
|
|
||||||||
|
|
|
|
|
|
|
|
|
. |
|
|
рый квадратичная форма имеет в системе X OY |
|
|
|
||||||||
ПРИВЕДЕНИЕ ОБЩЕГО УРАВНЕНИЯ КРИВОЙ ВТОРОГО ПОРЯДКА К КАНОНИЧЕСКОМУ ВИДУ
Общее уравнение кривой второго порядка имеет вид:
a x2 |
2a xy a y2 |
a x a y a 0. |
|||
|
|
0 |
|||
11 |
12 |
22 |
1 |
2 |
|
квадратичная форма |
линейная форма |
|
|||
В результате невырожденного линейного преобразования с матрицей T квадратичная форма перейдет в квадратичную форму, линейная – в линейную, а свободный член a0 не изменится. Каждую группу слагаемых будем преобразовывать отдельно, а именно: найдем ортогональное преобразование, приводящее квадратичную форму к каноническому виду, затем посмотрим, как в результате этого преобразования изменится линейная форма (ортогональное преобразование в нашем случае – это поворот осей). После поворота осей подберем параллельный перенос новой системы X OY так, чтобы после него уравнение кривой стало каноническим.
67

ПРИМЕР. Привести к каноническому виду ранее полученное уравнение параболы (стр. 58) и построить ее:
|
|
|
|
x2 |
2xy y2 |
14x 10y 25 0. |
|
(3.37) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
квадратичная форма |
линейная форма |
|
|
|
|
|
|
1) Составим матрицу квадратичной формы: A |
1 |
1 |
|||||
|
|
|
1 |
. |
|||||
|
|
|
|
|
|
|
|
1 |
|
|
|
2) Составим и решим характеристическое уравнение (3.36): |
|||||||
|
1 r |
1 |
|
0 r2 2r 0 r 0, r 2 – собственные значения. |
|||||
|
|
||||||||
|
|
|
|
||||||
|
1 |
1 r |
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
||
3) Найдем первый единичный собственный вектор, то есть решим систе-
му (3.34):
r1 0: |
1 |
1 |
|
|
|
|
|
|
|
0 |
|
|
1 |
– первый собственный век- |
||||||||||
|
|
|
|
|
||||||||||||||||||||
|
1 |
1 |
|
11 |
|
0 11 |
|
21 |
|
X1 |
||||||||||||||
тор. |
|
21 |
|
|
11 21 0 |
|
|
1 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
X1 |
|
|
2 X1 |
|
|
|
|
– первый единичный собственный вектор (орт оси OX |
|
). |
||||||||||||
|
|
|
1 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4) Найдем второй единичный собственный вектор, то есть решим (3.35):
r2 2: |
1 |
1 |
|
|
|
|
|
|
|
|
0 |
|
|
1 |
– второй собственный |
||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
12 |
0 |
12 |
|
22 |
|
X2 |
|
||||||||||||||||
|
|
|
|
1 |
1 22 |
|
12 22 0 |
|
|
|
1 |
|
|||||||||||||
вектор. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
X2 |
|
2 X2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
1 |
|
|
|
|
– второй единичный собственный вектор (орт оси OY ). |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Заметим, что X1 X2 , так как скалярное произведение |
X1,X2 0. |
||||||||||||||||||||||||
68

|
1 |
|
|
1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
2 |
2 |
|
||||||||||
5) Запишем матрицу поворота T : T |
|
, T 1. |
||||||||||
|
1 |
1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2 |
2 |
|
|
|
||||||||
|
|
|
|
|
||||||||
Кроме того, TT T 1, то есть T ортогональна. В результате преобразования с матрицей T квадратичная форма примет вид:
x2 2xy y2 0 x 2 2y 2 .
6) Выпишем уравнения, связывающие старые координаты x,y с новыми
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x ,y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
x |
1 |
|
|
y |
|||||||
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
x |
x |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
2 |
2 |
2 |
|
2 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– формулы поворота ко- |
|||||||||||||||
(3.32) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
y |
1 |
|
|
|
1 |
|
|
|
y |
|
1 |
|
|
x |
1 |
|
|
y |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2 |
|
|
|
2 |
|
|
|
|
2 |
|
2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
ординатных осей (см. 3.24).
Тогда линейная форма изменит свой вид таким образом:
|
|
|
|
|
|
|
|
|
|
14x 10y |
14 |
|
x |
14 |
|
y |
10 |
|
x |
10 |
|
y 12 |
|
x 2 |
|
|
y . |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кривая задается уравнением: |
|
|
|
||||||||||||||||||||||||||
|
|
|
Итак, в системе X OY |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
2y |
2 |
12 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. Выделим полный квадрат по переменной |
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
2x |
|
|
|
2y |
|
25 0 |
y : |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
2 y |
2 |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 0 |
||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
2 |
|
12 2x 25 0 2 y |
|
|
|
12 2x |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
y |
|
|
|
|
6 2 x |
|
|
2 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
7) Сделаем параллельный перенос осей в новое начало – вершину пара- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
x |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
болы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
формулы |
параллельного переноса |
осей |
в точку |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
y y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
69

|
|
|
|
2 |
(см. |
|
|
кривая |
задается |
|
уравнением |
|||||||
|
|
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||
O 2, |
|
|
|
3.23). В системе X OY |
|
|||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
y 2 6 |
|
|
x . Это каноническое уравнение параболы. |
|
|
|
|
|
|
|
|
|||||||
|
2 |
|
|
|
|
|
|
|
|
|||||||||
Для того, чтобы построить параболу (3.37), надо в пдск ХОУ построить |
||||||||||||||||||
векторы |
|
X1 |
и X2 |
и вдоль них направить оси |
OX и |
OY |
соответственно. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Затем сделать параллельный перенос этих осей в точку |
O |
2; |
|
|
|
|
. В полу- |
|||||||||||
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|||
ченной таким образом системе координат |
X O Y , взяв несколько контроль- |
|||||||||||||||||
ных точек, нарисуем параболу y 2 6
 2 x (рис. 44).
2 x (рис. 44).
Сравните эскиз (рис. 36) и данный рисунок, являющийся результатом точных расчетов.
Y
Y X
X
Y
|
О |
X |
O |
F
Рис. 44
ПЛОСКОСТЬ
Покажем, что плоскость в пространстве задается в любой пдск линейным уравнением относительно трех переменных x, y, z.
Если A – некоторая точка на плоскости , а n – вектор, перпендикулярный ей, то, во-первых, через A перпендикулярно n проходит единственная плоскость,
а, во-вторых, для любой точки M вектор AM n. Таким свойством об-
ладают только точки, лежащие на .
Чтобы вывести уравнение плоскости, зададим в пространстве пдск OXYZ . В этой системе координат A x0,y0,z0 , n A,B,C .
70