

6. Пример 2
Спроектировать микропроцессорную систему для определения параметров рулона, в который наматывается полоса металла.
Исходные данные: В системе используются радиоизотопный толщиномер на выходе которого формируется аналоговое напряжение в диапазоне 0 - 2,5 В, импульсный датчик установлен на оси рулона (за один оборот выдается 600 импульсов), толщина полосы 0,5 мм, линейная скорость движения полосы постоянна и равна Vп = 10 м/c.
Функции системы: МП система должна измерять: текущий радиус рулона, количество витков в рулоне, угловую скорость вала электродвигателя, при формировании заданного количества витков выдается сигнал на останов электродвигателя привода рулона и рез полосы ножницами. В МП системе предусмотрена звуковая и световая сигнализация: на каждый виток зажигается светодиод на SDK, на дисплее отображается линейная скорость полосы, при достижении заданного значения кол-ва витков на дисплее появляется надпись “рулон набран”, зажигаются все светодиоды SDK, раздается звуковой сигнал. На экране ПК: процесс намотки полосы в рулон, имеются поля для ввода паспорта рулона, поле для отображения толщины полосы, поле для отображения количества витков рулона, поле заданного значения витков, поле для отображения угловой скорости, сигнализация окончания намотки рулона.
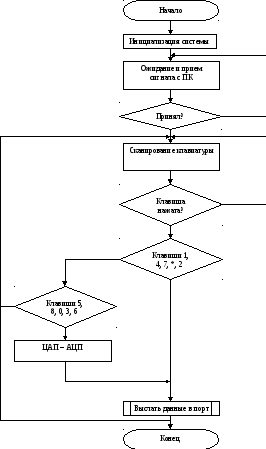
6.1. Алгоритм работы системы
Алгоритм основной программы на языке Assembler.
Нет
Да
Нет
Да
Нет
Да
Нет
Да
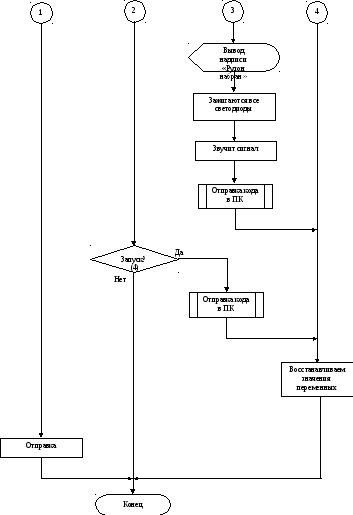
Алгоритм прерывания на языке Assembler.


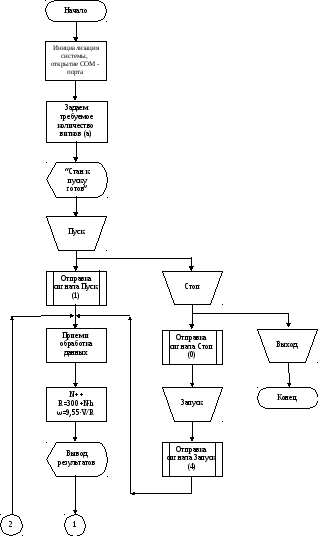
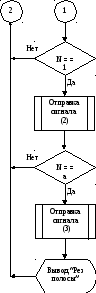
Алгоритм программы на языке С++ Builder.
6.2. Имитация датчиков
Имитация импульсного датчика скорости и радиоизотопного толщиномера выполнена через клавиатуру.
Импульсный датчик скорости:
клавиша «1» соответствует 6 импульсам;
клавиша «4» соответствует 60 импульсам;
клавиша «7» соответствует 600 импульсам;
клавиша «*» соответствует 6000 импульсам;
клавиша «2» соответствует 60000 импульсам.
Радиоизотопный толщиномер:
клавиша «5» соответствует 0,450 мм (0,5 В);
клавиша «8» соответствует 0,475 мм (1,0 В);
клавиша «0» соответствует 0,500 мм (1,5 В);
клавиша «3» соответствует 0,525 мм (2,0 В);
клавиша «6» соответствует 0,550 мм (2,5 В).
6.3. Расчет параметров технологического процесса
1. Радиус рулона:
R = r + N·h,
где: r – радиус моталки;
N – количество витков в рулоне;
h – толщина полосы.
2. Угловая скорость вращения рулона:
w = V/R,
где: V – скорость движения полосы;
R – радиус рулона.