

15.10. Какие меры могут быть использованы для повышения линейности выходного напряжения глин?
1 ) Увеличение постоянной времени заряда;
2) Применение следящей обратной связи по напряжению;
3) Применение в интегрирующей цепи вместо резистора линейного токостабилизирующего элемента
Контрольное задание № 16
Разработать устройство для измерения температуры в 4-х точках с погрешностью не более 5%, с вводом данных в МПС.
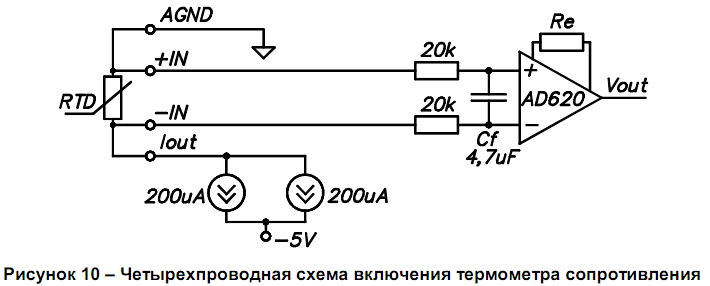
16.1. Термометр сопротивления, нарисуйте электрическую схему включения.
16.2. Какие факторы вносят погрешность в измерение температуры при использовании термометра сопротивления, как их можно уменьшить?
16.3. Привести схему усилителя разности двух сигналов.
16.4. Привести схему включения коммутатора для передачи сигналов с датчиков температуры.
16.5. Приведите структурную схему усилителя сигнала с подключенным датчиком температуры, АЦП и МПС, которая имеет ША, ШД и ШУ. Для ввода данных использовать шину ISA.
16.6. Напишите программу на Асемблере для ввода информации с 4х датчиков. (По команде IN указывать 4 адреса и вводите.)
16.7. Какие управляющие сигналы используются в шине ISA.(Input, Output Read, Input, Output Write)
16.8. Нарисуйте мостовую схему включения терморезистивного датчика.
16.9. Привести схему компенсационного стабилизатора напряжения на ОУ и на транзисторе.
16.10. Что такое коэффициент сглаживания фильтра?
16.11. Как рассчитать погрешность, вносимую коммутатором?
Ответы.
16.1. Термометр сопротивления — датчик для измерения температуры, сопротивление чувствительного элемента которого зависит от температуры.
Действие термометра сопротивление основано на зависимости изменения сопротивления термометра сопротивления от температуры. Rt=R0(1+αT)R0-температура при 0oC; α-температурный коэффициент сопротивления (величина зависит от материала изготовления);
α=(ΔR/R)/ΔT.ΔR-относительное изменение сопротивления датчика при изменении температуры на ΔT.

Существует 3 схемы включения датчика в измерительную цепь:
1) 2-х проводная. В схеме подключения простейшего термометра сопротивления используется два провода. Такая схема используется там, где не требуется высокой точности, так как сопротивление выводов включается в измеренное сопротивление и приводит к появлению дополнительной погрешности.
2) 3-х проводная обеспечивает значительно более точные измерения, за счёт того, что появляется возможность измерить отдельно сопротивление подводящих проводов и вычесть его из суммарного измеренного сопротивления.
3) 4-х проводная — наиболее точная схема, обеспечивает полное исключение влияния подводящих проводов. Недостаток — увеличение объёма используемого материала, стоимости и габаритов сборки.

16.2. При измерение температуры контактным термометром возникает погрешность за счет потерь теплоты ч/з термопреобразователь, погрешности за счет градиента температур. Чтобы их уменьшить, нужно улучшать условия теплообмена и уменьшать преобрователем. Это достигается размещением теплочувствительной части в том месте, где скорость перемещения среды наибольшая, выступающая часть для уменьшения потерь теплоты тщательно изолируется
1 6.3.
Дифференциальный
усилитель необходим в случаях, когда
информацию несёт не абсолютное значение
напряжения в некоторой точке (относительно
уровня заземления), а разность напряжений
между двумя точками.
6.3.
Дифференциальный
усилитель необходим в случаях, когда
информацию несёт не абсолютное значение
напряжения в некоторой точке (относительно
уровня заземления), а разность напряжений
между двумя точками.
16.4. Схема включения коммутатора для передачи сигналов с датчиков температуры

16.5.. Приведите структурную схему усилителя сигнала с подключенным датчиком температуры, АЦП и МПС, которая имеет ША, ШД и ШУ. Для ввода данных использовать шину ISA.

НУ – нормирующий усилитель, потом аналоговый коммутатор К и АЦП 8разрядный. Этого вполне хватит для измерения температуры в диапазоне -50..150 °С с погрешностью до 1%. Для уменьшения погрешности разрядность следует увеличивать. Потом через буферный регистр RG происходит запись на ШД ISA.
16.7. CS - сигнал “выбор чипа”; input/output read, input/output write – сигнал “чтения/записи” из внешнего устройства; memory read, memory write - сигнал “чтения/записи” из памяти. Основными сигналами управления в схеме являются: IOR, IOW, AEN, IRQ N.
IOR - строб чтения данных из устройств ввода-вывода.
IOW – строб записи данных в устройства ввода-вывода.
AEN (разрешение адреса) – используется в ПДП для сообщения всем платам расширения, что производится цикл ПДП.
I RQ
N
– сигналы запроса радиальных прерываний.
RQ
N
– сигналы запроса радиальных прерываний.
16.7. Мостовая схема включения терморезистивного датчика.
16.9.
Коэффициент
сглаживания - отношение коэффициента
пульсаций на входе фильтра
![]() к коэффициенту пульсаций на его выходе
к коэффициенту пульсаций на его выходе![]() .
.
16.10. Как рассчитать погрешность, вносимую коммутатором?
![]()
16.6. Т.к. будет стоять мультиплексор, на него должны подавать сигналы для коммутации, они берутся с ША, т.е. они должны задать при помощи команды OUT. Если по простому, можно написать 4 разных адреса, для того чтобы обратиться к 4 датчикам, или перебором.
Uses crt, dos;
Var n1,n2,n3,n4,n5:byte;
m,s:integer;
Begin
Assign f (‘vivid.txt’);
n:=0;
repeat
asm
mov dx,300f
in al,dx
mov n1,al
inc dx
in al,dx
mov n2,al
inc dx
in al,dx
mov n3,al
inc dx (дальше во втором столбике)
in al,dx
mov n4,al
inc dx
in al,dx
mov n5,al
end;
gettime(m,s);
writeln(m,’:’,s);
writeln(‘Датчик 1: ’, n1);
writeln(‘Датчик 2: ’, n2);
writeln(‘Датчик 3: ’, n3);
writeln(‘Датчик 4: ’, n4);
writeln(‘Датчик 5: ’, n5);
delay (2000);
until keypressed;
end.
Программа считывает с датчиков 1-5 данные и выводит их на экран с указанием времени. Опрос датчиков происходит каждые 2 с. т.к. температура все равно быстро не меняется.
16.8. Схемы компенсационных стабилизаторов напряжения на ОУ и на транзисторе.


Задание 16. - Структурная схема разрабатываемого прибора (ниже).

Д1-Д4 – датчики; ВП1 – ВП3 – вторичные преобразователи
К – коммутатор; КС – канал связи
ГТИ – генератор тактовых импульсов
УУ – устройство управления
БОИ – блок обработки-индикации
Ч – частотомер; БО – блок обработки
БИ – блок индикации
Контрольное задание № 17
Разработать устройство для измерения постоянной магнитной индукции в зазоре электрической машины, если величина зазора 2 мм, а индикация измеряемой величины должна осуществляться аналоговым прибором.