

1.3. Пошук у глибину і пошук у ширину
Серед різноманітних методів, за допомогою яких можна організовувати пошук потрібної вершини на дереві перебору, а відтак і шляху до неї, прийнято виокремлювати дві основні стратегії:
• пошук у ширину;
• пошук у глибину (інші назви — перебір з поверненнями; бектрекінг).
Процедура пошуку в ширину передбачає аналіз на кожному кроці синів усіх вершин, що були проаналізовані до цього (в інтерпретації прийняття рішень це означає паралельну перевірку всіх можливих альтернатив).
Процедура пошуку в глибину передбачає першочерговий аналіз нащадків тих вершин, що були проаналізовані останніми. Це означає, що всі альтернативи аналізуються послідовно, одна за одною; аналіз деякої альтернативи завершується лише тоді, коли вдається остаточно встановити, приводить вона до успіху чи ні. Якщо ж альтернатива зумовлює невдачу, відбувається повернення і розгляд інших альтернатив.
На рис. 2, а показана послідовність перегляду вершин при пошуку в ширину, а на рис. 2, б – при пошуку в глибину.
Можна навести ряд прикладів, коли перебір у глибину дозволяє виграти час порівняно з перебором в ширину і навпаки. Як правило, пошук у глибину дозволяє зекономити пам'ять, оскільки при його реалізації немає необхідності запам'ятовувати все дерево, достатньо зберігати в пам'яті лише вершини, що мають відношення до поточної альтернативи.
На практиці процедура пошуку в глибину набула значнішого поширення. Можна стверджувати, що перебір з поверненням став класичною загальноінтелектуальною процедурою, що лягла в основу сучасних методик планування цілеспрямованих дій, програмування ігор, автоматизованого доведення теорем тощо.
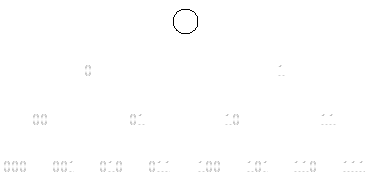
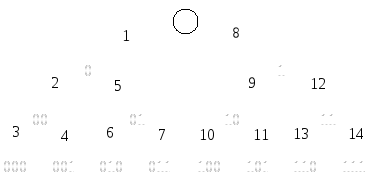
а) б)
Рис. 2. Процедура пошуку в ширину (а) та пошуку в глибину (б)
2. Простір задач і простір станів
Методики планування цілеспрямованих дій прийнято розподіляти на два класи: планування в просторі станів і планування в просторі задач.
При плануванні в просторі станів заданим вважається деякий набір станів (ситуацій). Відомі дії, які може здійснювати система та які визначають перехід з одного стану до іншого.
Графом станів задачі називається орієнтований граф, вершини якого відповідають можливим станам предметної області, а дуги — методам переходу від стану до стану.
Дуги можуть мати мітки, які інтерпретуються як вартість або довжина відповідного переходу. Тоді вирішення задачі являє собою пошук шляху від початкового стану до цільового; при цьому типовою є вимога оптимізації даного рішення, тобто пошуку найкоротшого шляху. Відповідно, після того як зведення задачі до формальної моделі проведено можна використовувати відомі алгоритми пошуку шляхів на графах (алгоритми Мура, Дейкстри, гілок і границь і т. п.).
Класичним прикладом планування в просторі станів можна вважати задачу пошуку шляху від одного міста до іншого.
Планування в просторі задач передбачає декомпозицію початкової задачі на підзадачі, поки не буде досягнуто зведення до задач, для яких є готові алгоритми вирішення. Таку декомпозицію зручно уявляти собі у вигляді І/АБО-графа.
Існують методики комбінування методів пошуку в просторі станів і в просторі задач.