

2.2. Динамика вращательного движения твердого тела
Рассмотрим
произвольную механическую систему,
состоящую из n
материальных точек. Пусть
![]() -
сила, действующая наi-ую
материальную точку со стороны k-ой
материальной точки, а
-
сила, действующая наi-ую
материальную точку со стороны k-ой
материальной точки, а
![]() - равнодействующая внешних сил, действующих
наi-ую
материальную точку системы. По второму
закону Ньютона (см. (2.1.14)) уравнение
движения материальной точки может быть
представлено в виде:
- равнодействующая внешних сил, действующих
наi-ую
материальную точку системы. По второму
закону Ньютона (см. (2.1.14)) уравнение
движения материальной точки может быть
представлено в виде:
![]() Причем
Причем![]() так какi-ая
материальная точка на себя не действует.
Умножим векторно
так какi-ая
материальная точка на себя не действует.
Умножим векторно
![]() -
радиус-вектор, проведенный вi-ую
материальную точку из начала координат,
на уравнение движения материальной
точки. Получим
-
радиус-вектор, проведенный вi-ую
материальную точку из начала координат,
на уравнение движения материальной
точки. Получим
|
|
(2.2.1,а) |

Легко
видеть, что из левой части выражения
(2.2.1,а) можно вынести дифференциал
![]() .
Действительно, так как
.
Действительно, так как![]() (из определения векторного произведения),
то
(из определения векторного произведения),
то![]() .
Таким образом,
.
Таким образом,
|
|
(2.2.1,б) |
 .
.
Векторное
произведение
![]() на
на![]() называют
называют![]() -моментом
импульса
i-ой
материальной точки (в СИ единица измерения
момента импульса -
-моментом
импульса
i-ой
материальной точки (в СИ единица измерения
момента импульса -
![]() ):
):
|
|
(2.2.2) |
Вектор
![]() перпендикулярен
плоскости, где лежат вектора
перпендикулярен
плоскости, где лежат вектора![]() и
и![]() ,
и образует с ними правую тройку векторов
(рис. 2.1).
,
и образует с ними правую тройку векторов
(рис. 2.1).
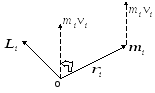
Рис. 2.1
Схематическое изображение вектора момента импульса i-ой материальной точки
Векторное
произведение радиуса - вектора
![]() ,
проведенного в точку приложения силы
,
проведенного в точку приложения силы![]() ,
на эту силу, называетсямоментом
,
на эту силу, называетсямоментом
![]() силы
силы![]() относительно
точкиO
(момент силы в системе СИ измеряют в
относительно
точкиO
(момент силы в системе СИ измеряют в
![]() ):
):
|
|
(2.2.3,а) |
Векторы
![]() ,
,![]() и
и![]() образуют правую тройку векторов:
образуют правую тройку векторов:

Рис. 2.2.
Схематическое изображение вектора момента силы, действующего на i-ую материальную точку
Численное значение момента силы можно определить как:
|
Mi = Firisini = Fili, |
(2.2.3,б) |
где
i
- угол между
векторами
![]() и
и![]() ,li,=
risini
– длина перпендикуляра, опущенного из
точки О на линию действия силы (плечо
силы). Из уравнений (2.2.1,б), (2.2.2) и (2.2.3,а)
следует, что:
,li,=
risini
– длина перпендикуляра, опущенного из
точки О на линию действия силы (плечо
силы). Из уравнений (2.2.1,б), (2.2.2) и (2.2.3,а)
следует, что:
|
|
(2.2.4,а) |
Или для системы, состоящей из n точек:
|
…………………………………………..
|
(2.2.4,б) |
Сложим почленно полученные выше уравнения:
|
|
(2.2.5) |
Отметим, что суммарный вектор
|
|
(2.2.6) |
называют главным моментом внешних сил относительно точки О, а вектор
|
|
(2.2.7,а) |
моментом импульса системы материальных точек. Кроме того, очевидно
|
|
(2.2.7,б) |
Для дальнейших выводов необходимо доказать, что
|
|
(2.2.8) |
Действительно,
по третьему закону Ньютона (2.1.9)
![]() .
Как видно из рис.2.3,
.
Как видно из рис.2.3,![]() Следовательно,
можно преобразовать
Следовательно,
можно преобразовать![]()
![]() (аналог
третьего
закона Ньютона во вращательном движении).
Так как двойную сумму слева (2.2.8) можно
разбить на сумму попарных слагаемых
подобного вида
(аналог
третьего
закона Ньютона во вращательном движении).
Так как двойную сумму слева (2.2.8) можно
разбить на сумму попарных слагаемых
подобного вида
![]() ,
то и вся сумма в (2.2.8) тождественно равна
нулю.
,
то и вся сумма в (2.2.8) тождественно равна
нулю.
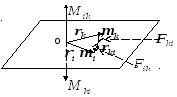
Рис. 2.3.
Взаимодействие i-ой и k-ой точек системы при вращении
относительно точки О
Таким образом, из выражений (2.2.6), (2.2.7,б) и (2.2.8) следует, что :
|
|
(2.2.9) |
В соответствие с (2.2.9), скорость изменения момента импульса системы относительно неподвижной точки равна результирующему моменту (относительно той же точки) всех внешних сил, действующих на систему – основной закон динамики вращательного движения для системы материальных точек.
Рассмотрим
случай, когда твердое тело закреплено
в двух неподвижных точках O
и O1.
В этом случае вращение тела можно
рассматривать вокруг некоторой оси,
например OZ. Такое вращение происходит
под действием составляющей момента
внешних сил
![]() .
Из уравнения (2.2.9) следует, что:
.
Из уравнения (2.2.9) следует, что:
|
|
(2.2.10) |
Здесь
![]() ,
,![]() - составляющие векторов момента импульса
тела и результирующего момента внешних
сил относительно точки О, направленные
вдоль неподвижной оси OZ вращения тела
и называемые, соответственно, моментом
импульса тела относительно оси OZ
и главным
моментом внешних сил относительно той
же оси.
Уравнение (2.2.10) является основным
законом динамики для тела, вращающегося
вокруг неподвижной оси.
- составляющие векторов момента импульса
тела и результирующего момента внешних
сил относительно точки О, направленные
вдоль неподвижной оси OZ вращения тела
и называемые, соответственно, моментом
импульса тела относительно оси OZ
и главным
моментом внешних сил относительно той
же оси.
Уравнение (2.2.10) является основным
законом динамики для тела, вращающегося
вокруг неподвижной оси.
Пусть
тело, состоящее из n
точек, вращается вокруг неподвижной
оси с угловой скоростью
![]() Так как (из (2.2.7,а))
Так как (из (2.2.7,а))![]() то
то![]() Из рис. 2.4 следует, что для произвольнойi
- ой точки
Из рис. 2.4 следует, что для произвольнойi
- ой точки
![]() Следовательно,
Следовательно,![]()
![]() Учтем, что вектор, являющийся результатом
векторного произведения
Учтем, что вектор, являющийся результатом
векторного произведения![]() ,
перпендикулярен вектору
,
перпендикулярен вектору![]() (из определения векторного произведения),
и проекция вектора
(из определения векторного произведения),
и проекция вектора![]() на
осьOZ
на
осьOZ
![]()
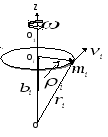
Рис. 2.4.
Схема вращательного движения твердого тела относительно оси OZ
Учтем,
что
![]() (см. главу 1, п.2). В последнем случае
(см. главу 1, п.2). В последнем случае![]() Дляi
- й точки
Дляi
- й точки
![]() ,
для всего тела окончательно
,
для всего тела окончательно
|
|
(2.2.11) |
Сумму
произведений масс материальных точек
тела на квадрат расстояния от точек до
оси вращения называют моментом
инерции тела относительно этой оси
![]() (единицы измерения
(единицы измерения![]() в СИ -
в СИ -![]() ):
):
|
|
(2.2.12) |
С учетом (2.2.12) уравнение (2.2.11) можно переписать в виде:
|
|
(2.2.13) |
На практике при вычислении момента инерции тела его мысленно разбивают на бесконечно большое число малых элементов с массами dm и выражение (2.2.12) принимает вид:
![]()
Неподвижная ось вращения может проходить как через центр инерции тела, так и вне его. Докажем теорему о переносе осей инерции (теорема Штейнера): момент инерции тела I относительно произвольной оси ОО1 равен сумме момента инерции тела IC относительно оси O’O’1, проведенной через центр инерции тела параллельно оси ОО1 и произведения массы m тела на квадрат расстояния между этими осями (рис. 2.5):
|
I = IC + md2. |
(2.2.14) |
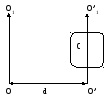
Рис. 2.5.
Схема вращательного движения тела относительно произвольной оси ОО1
Доказательство:
Согласно выражению (2.2.12) момент инерции
тела относительно произвольной оси
можно определить:
![]() ,
а относительно оси проходящей через
центр масс -
,
а относительно оси проходящей через
центр масс -![]() ,
где
,
где![]() -
расстояние отi-ой
материальной точки тела до оси ОО1;
-
расстояние отi-ой
материальной точки тела до оси ОО1;
![]() -
расстояние от этой же точки до оси О’О’1,
проходящей через центр масс. Проведем
ось OX
таким образом, чтобы она пересекала оси
ОО1
и О’О’1
, и была перпендикулярна им.
-
расстояние от этой же точки до оси О’О’1,
проходящей через центр масс. Проведем
ось OX
таким образом, чтобы она пересекала оси
ОО1
и О’О’1
, и была перпендикулярна им.
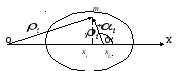
Рис.2.6.
Схема вращательного движения тела относительно произвольной оси OO1 – вид сверху
Как
видно из рис. 2.6, с учетом теоремы
косинусов:
![]() причем
причем![]() гдеxi
и xC
– абсциссы i-ой
точки тела и его центра инерции С.
Преобразуем
гдеxi
и xC
– абсциссы i-ой
точки тела и его центра инерции С.
Преобразуем
 Из определения центра инерции (см.
(2.1.10,б))
Из определения центра инерции (см.
(2.1.10,б)) .
Таким образом,
.
Таким образом,![]() Что и требовалось доказать.
Что и требовалось доказать.
Таблица моментов инерции для однородных тел простейшей формы
|
№ п.п. |
Тело |
Положение оси OZ |
Момент инерции I |
|
1 |
Полый тонкостенный цилиндр радиусом R и массой m. |
Ось симметрии |
|
|
2 |
Сплошной цилиндр (диск) радиусом R и массой m. |
Ось симметрии |
|
|
3 |
Прямой тонкий стержень длиной l и массой m. |
Ось перпендикулярная стержню и проходит через его середину |
|
|
4 |
Прямой тонкий стержень длиной l и массой m. |
Ось перпендикулярная стержню и проходит через его конец |
|
|
5 |
Шар радиусом R и массой m. |
Ось проходит через центр шара |
|
|
6 |
Шар радиусом R и массой m. |
Ось проходит на расстоянии d от центра шара |
|
Из уравнения (2.2.13) следует, что основное уравнение динамики вращательного движения тела относительно неподвижной оси (2.2.10) можно записать в виде:
|
|
(2.2.15) |
Если
тело абсолютно твердое, то его момент
инерции Iz
не зависит от времени и, как следствие,
![]() ,
или
,
или
|
|
(2.2.16) |
Из выражения (2.2.16) видно, что угловое ускорение твердого тела, вращающегося относительно неподвижной оси OZ, прямо пропорционально результирующему моменту (относительно этой оси) действующих на тело всех внешних сил, и обратно пропорционально моменту инерции тела относительно той же оси (второй закон Ньютона во вращательном движении). Таким образом, момент инерции является мерой инертности тела во вращательном движении.
В случае, когда ось вращения не закреплена, момент инерции тела не является скалярной величиной, а определяется матрицей, которую в физике называют тензором второго ранга:
 .
.
В системе координат, состоящей из 3-х собственных векторов матрицы I , последняя приобретает диагональный вид
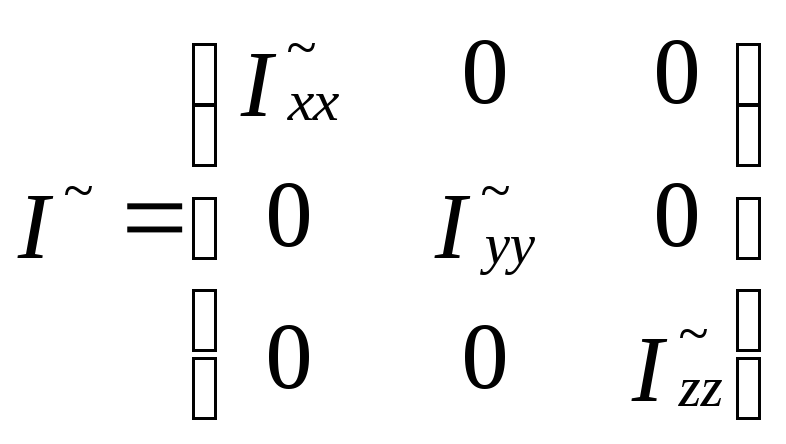
Диагональные
элементы матрицы
![]() являютсясобственными
числами
матрицы
I,
и называются главными
моментами инерции тела относительно
главных осей – собственных векторов
матрицы I.
Как известно из курса высшей математики,
являютсясобственными
числами
матрицы
I,
и называются главными
моментами инерции тела относительно
главных осей – собственных векторов
матрицы I.
Как известно из курса высшей математики,
![]() ;
;
![]() .
.