

3dok_toa / Лабораторні роботи / Методичка 1 семестр 2011
.pdfпотужності. Крім того, вихідна напруга несінусоідальна і містить в основному складові третьої гармоніки. Для усунення або зменшення цих недоліків у схему стабілізатора вводять спеціальні компенсуючи контури на основі резонансних LC-фільтрів.
Ферорезонансні стабілізатори мають досить високі робочі параметри:
-коефіцієнт стабілізації в них досягає 25…30;
-ККД становить 0,7…0,8;
-коефіцієнт потужності при активному навантаженні 0,8…0,9;
-вихідна потужність 100...10000 ВА.
Цим і пояснюється значний діапазон потужностей промислових ферорезонансних стабілізаторів і їх широке поширення на практиці.
Стабілізатори постійної напруги й струму. Для стабілізації постійної напру-
ги і струму застосовують активні нелінійні елементи: електронні лампи, баретери, лампи тліючого і дугового розряду, варистори, термістори, напівпровідникові діоди й тріоди. Всі перераховані елементи мають нелінійну вольт-амперну характеристику, що на деякій ділянці практично може бути замінена відрізком прямої, паралельної осі напруги (рис. 3, а і б) або осі струму (рис. 3, в і г).
а) |
б) |
в) |
г) |
Рисунок 3 - Вольт-амперні характеристики нелінійних елементів, які використовуються у стабілізаторах напруги і струму:
а- баретер; б - лампа розжарювання; в - лампа з холодним катодом;
г- напівпровідниковий діод.
Залежно від вольт-амперної характеристики використовуваного нелінійного елемента стабілізатори поділяються на дві основні групи:
-паралельні;
-послідовні.
Упаралельному стабілізаторі (рис. 4, а) елемент із нелінійним опором R і
ВАХ (рис. 3, в і г), включається паралельно навантаженню RНАВ.
У послідовного стабілізатора (рис. 4, б) нелінійний елемент із ВАХ (рис. 3, a і б), приєднаний до навантаження послідовно.
Параметричні стабілізатори постійної напруги. В цих стабілізаторах вхідна напруга UВХ повинна бути більше вихідної UВИХ. Надлишки вхідної напруги в першій схемі погашаються баластовим опором RБ, а в другий - нелінійним опором R. Вихідна напруга першої схеми (рис. 4, а) UВХ  при зміні вхідної напруги UВХ залишається практично постійною за рахунок зміни струму IВХ і втрат напруги IВХRБ. У другій схемі (рис. 4, б) втрата напруги IВХRБ пропорційна вхідній напрузі за
при зміні вхідної напруги UВХ залишається практично постійною за рахунок зміни струму IВХ і втрат напруги IВХRБ. У другій схемі (рис. 4, б) втрата напруги IВХRБ пропорційна вхідній напрузі за
61

рахунок зміни опору R нелінійного елементу.
а) б)
Рисунок 4 - Принцип побудови параметричних стабілізаторів а - паралельного; б - послідовного.
Коефіцієнт стабілізації паралельного стабілізатора звичайно вище, ніж послідовного, але у послідовного стабілізатора його можна збільшити, якщо опір навантаження зашунтувати значно меншим постійним баластовим опором RБ, як це показано пунктиром на рисунку 4, б. Однак це значно знижує вихідну потужність і ККД схеми, а також вимагає застосування потужного нелінійного опору. Тому в практичних схемах застосовують в основному паралельні параметричні стабілізатори напруги, а послідовне включення нелінійних елементів використається в стабілізаторах струму.
В сучасних параметричних стабілізаторах напруги застосовують стабілівольти та напівпровідникові діоди (стабілітрони).
Стабілівольти (рис. 5, а) - лампи тліючого розряду з холодними електродами використовуються для підтримки напруги на незмінному рівні, починаючи приблизно з 60 В і вище. До певного значення струму характер розряду стабілівольта, а отже й спадання напруги на ньому зберігаються, змінюється лише площа, що бере участь у розряді, електродів. У цьому й полягає стабілізуюча дія розглянутого елементу. Подальше збільшення струму приводить до утворення дугового розряду і виходу стабілізатору з ладу. Характерно, що запалювання стабілівольта (утворення тліючого розряду) відбувається при напрузі більшої, ніж та, що необхідна для горіння.
З напівпровідникових діодів у параметричних стабілізаторах частіше інших використовуються кремнієві стабілітрони, до яких прикладається зворотна напруга, що трохи перевищує напругу пробою (рис. 5, б). Напівпровідникові стабілітрони - це германієві або кремнієві діоди, до яких прикладена зворотна напруга, що трохи перевищує напругу пробою, і в залежності від конструкції по-різному (від сотих часток до одиниць вольтів). Стабілітрони відрізняються від стабілівольтів тим, що вони дозволяють здійснити стабілізацію напруг у значному діапазоні (від одиниць до сотень вольтів). Коефіцієнт стабілізації кремнієвих стабілітронів коливається в межах 25…50, потужність не перевищує декількох десятків ват.
а) |
б) |
в) |
|
62 |
|

Рисунок 5 - Схеми параметричних стабілізаторів напруги: а - зі стабілівольтом; б - зі стабілітроном, в - двокаскадна схема.
Коефіцієнт стабілізації стабілітронів можна істотно підвищити при каскадному їх включенні (рис. 5, в). У цьому випадку напруга входу кожного попереднього каскаду повинна бути більше наступного:
UВХ1 > UВХ > UВИХ
Однак каскадне включення стабілітронів зменшує вихідну потужність і звужує діапазон зміни струмів навантаження.
Та обставина, що параметричні стабілізатори не можуть регулювати (зменшувати або збільшувати) вихідну напругу, досить істотно обмежує область їхнього застосування.
Компенсаційні стабілізатори постійного струму. Компенсаційні стабілізатори мають більшу потужність, чим параметричні, і дозволяють регулювати вихідну напругу. У них використаються керовані нелінійні елементи:
-електронні й газорозрядні лампи;
-напівпровідникові тріоди й тиристори;
-дроселі з підмагнічуванням;
-варикапи;
-термістори з підігрівом і ін.
Особливо часто застосовуються електронні й транзисторні компенсаційні стабілізатори.
Принцип роботи компенсаційних стабілізаторів розглянемо на прикладі транзисторного стабілізатору (рис. 6).
а) б)
Рисунок 6 - Принципові схеми компенсаційних стабілізаторів
а- без регулювання вихідної напруги;
б- з регулюванням вихідної напруги.
Схема має вимірювальний орган - кремнієвий діод VD (стабілітрон), підсилювальний орган - тріод VT і негативний паралельний зворотний зв'язок, виконаний на основі баластного резистора RБ. Тріод VT перешкоджає відхиленню вихідної напруги від заданого значення при зміні вхідного. Наприклад, зі збільшенням напруги (UВХ підсилюється струм через діод VD, що приводить до зростання напруги на резисторі RБ (рис. 6, а) або до збільшення струму через емітерний перехід тріода VТ2 і напруги на резисторі RБ (рис 6, б). Внаслідок цього тріод VТ1, що працює в підсилювальному режимі, частково закривається й спадання напруги на ньому зростає, що перешкоджає підвищенню вихідної напруги стабілізатору. Вихідна напруга в
63
схемі, зображеної на рисунку 6, а, близька до зворотної напруги UД стабілітрона VD. Якщо потрібно, щоб вихідна напруга відрізнялася від UД, то використовується схема, зображена на рисунку 6, б, принцип роботи якої полягає в наступному: при переміщенні движка резистора R1 нагору на базі тріода VТ2 збільшується негативний потенціал, внаслідок чого він відкривається і тим самим підвищує напругу на резисторі RБ, що приводить до закриття тріода VТ1. Отже, напруга на навантаженні RНАВ знижується. Навпроти, для збільшення напруги на навантаженні движок резис-
тору R1 необхідно перемістити вниз.
Точність підтримки вихідної напруги в цих стабілізаторах становить 1...2% при зміні вхідної напруги на 10…15%, але компенсаційні стабілізатори мають велику інерційність (0,1...1 с).
ОПИС ЛАБОРАТОРНОГО СТЕНДУ
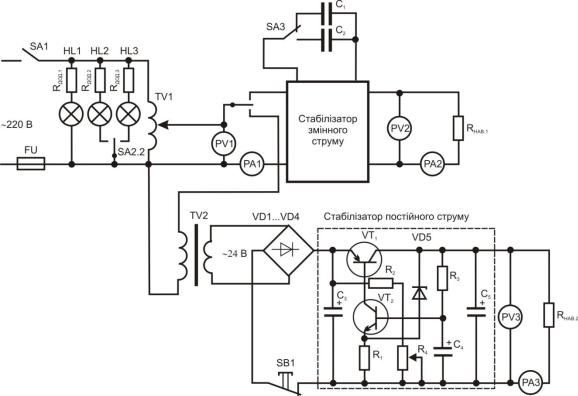
Усі елементи лабораторного стенду вказані на рисунку 7.
Рисунок 7 - Принципова електрична схема стенду досліду стабілізаторів змінного та постійного струму
Лабораторний стенд складається із ферорезонансного стабілізатору змінного струму і стабілізатору постійного струму, а також:
-комутаційної апаратури SА1…SА3, SВ1. SА1 – загальне включення лабораторного стенду, SА2 – перемикач (з середнім положенням) переключення напруги на стабілізатор змінного струму, на стабілізатор постійного струму та нейтральне положення, SА3 – перемикач підключення конденсаторів С1, С2 різної ємності до ферорезонансного стабілізатору змінного струму; SВ1 – кнопка зброду режиму короткого замикання в навантаженні для стабілізатору постійного струму;
-резисторів навантаження RНАВ.1 для стабілізатору змінного струму та RНАВ.2 ста-
64

білізатору постійного струму;
-індикаторних ламп HL2 (роботи стабілізатору змінного струму) і HL3 (роботи стабілізатору постійного струму) з відповідними додатковими резисторами
RДОД.2 і RДОД.3;
-запобіжника FU; світлової сигналізації включення лабораторного стенду HL1 з додатковим резистором RДОД.1;
-лабораторний автотрансформатор (ЛАТР) TV1 і трансформатору живлення TV2;
-вимірювальних приладів – струму РА1…РА3 та напруги РV1…РV3.
Для виконання дослідів необхідно включити перемикач SА1 при цьому засвітиться HL1.
ВИКОНАННЯ ДОСЛІДЖЕНЬ
1.Перевірити положення перемикачів SA2 - в положенні "0", регулятор ЛАТРа TV1 в крайнє ліве положення, вимикач SA4 - вимкнено;
2.Включити лабораторний стенд вимикачем SA1 (при цьому загориться індикаторна лампа (світлодіод) HL1);
3.Зробити досліди стабілізаторів змінного та постійного струму.
3.1Дослід ферорезонансного стабілізатору змінного струму.
3.1.1Встановити перемикач SA2 в положення "1" (при цьому загориться індикаторна лампа (світлодіод) HL2).
3.1.2Підключити перемикачем SA3 конденсатор С1.
3.1.3Змінючі вхідну напругу феррезонансного стабілізатору змінного струму, за інтервалом вказаним викладачем, в межах від 0 до 240 В визначити показники вимірювальних приладів PV2 та PA2 з відсутнім навантаженням та
з урахуванням навантаження RНАВ.1. Результати занести до таблиці 1.
Таблиця 1 Результати випробувань ферорезонансного стабілізатору при зміні вхідної напруги.
Холостий хід |
|
Номінальне навантаження |
||||||
конденсатор С1, ___ мкФ |
конденсатор С2, ___ мкФ |
|||||||
|
|
|||||||
UВХ, В |
UВИХ, В |
UВХ, В |
ІВХ, мА |
, % |
UВИХ, В |
ІВИХ, мА |
, % |
|
|
|
|
|
|
|
|
|
|
3.1.4Підключивши осцилограф до навантаження RНАВ.1 зняти осцилограму виходної напруги.
3.1.5Підключити перемикачем SA3 конденсатор С2.
3.1.6Змінючі вхідну напругу ферорезонансного стабілізатору змінного струму, за інтервалом вказаним викладачем, в межах від 0 до 240 В визначити показники вимірювальних приладів PV2 та PA2 з урахуванням навантаження RНАВ.1. Результати занести до таблиці 1.
3.1.7Підключивши осцилограф до навантаження RНАВ.1 зняти осцилограму форми виходної напруги при номинальному значенні напруги мережи. Робота та підключення осцилографу представлено в додатку С
3.1.8 В режимі стабілізації встановити вхідну напругу 220 В змінюючи опір навантаження (4...5 точок) записати до таблиці 2 значення вхідних та вихідних струмів і напруг, та за формулою 2 знайти стабілізатору.
65

Таблиця 2 - Результати випробувань ферорезонансного стабілізатору змінного струму при зміні навантаження.
UВХ, В |
ІВХ, мА |
UВИХ, В |
ІВИХ, мА |
, % |
|
|
|
|
|
3.1.9Встановити регулятор ЛАТРа TV1 в крайнє ліве положення.
3.2Дослід стабілізатору постійного струму.
3.1.1Встановити перемикач SA2 в положення "2" (при цьому загориться індикаторна лампа (світлодіод) HL3).
3.1.2Встановити регулятор R4 в крайнє праве положення.
3.1.3 Змінючі вхідну напругу компенсаційного стабілізатору постійного струму, за інтервалом вказаним викладачем, в межах від 0 до 240 В (контроль по вимірювальному приладу PV1, з урахуванням встановленного трансформатору TV2) визначити показники вимірювальних приладів PV3, PV4 та PA3 з відсутнім навантаженням та урахуванням навантаження RНАВ.2. Результати занести до таблиці 3.
Таблиця 3 - Результати випробувань компенсаційного стабілізатору
UВХ, В |
|
0 |
3 |
6 |
|
9 |
12 |
15 |
18 |
21 |
24 |
|
без навантаження |
UВИХ, В |
|
|
|
|
|
|
|
|
|
|
|
з навантаженням |
UВИХ, В |
|
|
|
|
|
|
|
|
|
|
|
3.1.4 При встановленій вхідної напрузі |
220 В (PV1) змінюючи положення |
|||||||||||
регулятору R4 визначити діапозон регулювання постійної напруги на виході стабілізатору постійного струму.
3.1.5При заданому значенні вихідної постійної напрузі зробити режим короткого замикання. Визначити показники вимірювальних приладів. Повернення в робочий стан стабілізатору постійного струму із допомогою кнопки SВ1.
3.1.6Встановити регулятор R4 в крайнє ліве положення, а перемикач SA2 - в положенні "0".
4.Виключити лабораторний стенд вимикачем SA1 (при цьому погасне індикаторна лампа (світлодіод) HL1).
5.Оформити звіт.
ОФОРМЛЕННЯ ЗВІТУ
Звіт повинний мати:
1.Тему і мету лабораторної роботи.
2.Стислі теоретичні дані по даній темі.
3.Схему досліду.
3.1. За дослідними даними підрахувати ККД ферорезонансного стабілізатору змінної напруги для різних значень вхідної напруги:
(2)
Результати обчислень занести до таблиці 1
3.2. За даними табл. 1 накреслити залежності UВИХ = f(UВХ) (для режиму холостого ходу та під навантаженням) і = f(UВХ).
3.3. За кривими UВИХ = f(UВХ) знайти коефіцієнти стабілізації для режимів холостого ходу та під навантаженням при відхиленні вхідної напруги на 10% від номі-
66

нальної 220 В.
(3)
де UВХ.Н і UВИХ.Н - відповідно вхідна і вихідна номінальна напруга, В;
 і
і  - відповідно зміна вхідної напруги і відповідна йому відносна зміна
- відповідно зміна вхідної напруги і відповідна йому відносна зміна
вихідної напруги.
3.4. За даними табл. 2 накреслити залежності UВИХ = f(IВИХ) і = f(IВИХ).
3.5. За даними табл. 3 накреслити залежності UВИХ = f(UВХ), за формулою 2 знайти коефіцієнт стабілізації.
4. Представити осцилограми дослідів п.п. 3.1.7.
5. Висновки по лабораторній роботі.
КОНТРОЛЬНІ ПИТАННЯ
1.Яке призначення стабілізаторів в системах автоматики?
2.Чим відрізняються параметричні стабілізатори від компенсаційних?
3.Що таке коефіцієнт стабілізації стабілізатору за напругою?
4.Що таке стабілізатор напруги та стабілізатор струму?
5.Принцип дії феромагнітного стабілізатору напруги?
6.Які недоліки має феромагнітний стабілізатор напруги?
7.Принцип дії ферорезонансного стабілізатору напруги?
8.Переваги ферорезонансних стабілізаторів напруги перед феромагнітними.
9.Які недоліки має ферорезонансний стабілізатор напруги?
10.Які нелінійні елементи використовуються в параметричних стабілізаторах напруги або струму?
11.Як побудовані послідовні та паралельні параметричні стабілізатори постійної напруги?
12.Які переваги та недоліки каскадного включення стабілітронів у паралельному параметричному стабілізаторі?
13.Які переваги та недоліки мають компенсаційні стабілізатори постійного струму?
14.Принцип дії компенсаційного стабілізатора постійного струму.
15.За рахунок чого в компенсаційних стабілізаторах постійного струму можна регулювати вихідну напругу?
ЛІТЕРАТУРА
1.Бородин И.Ф. Основы автоматики и автоматизация производственных процессов / И.Ф. Бородин, Н.И. Кирилин. - М.: Колос, 1977, 167-174 с.
2.Колесов Л.В. Основы автоматики / Л.В. Колесов. - М.: Колос, 1978, 98-102 с.
3.Бохан Н.И. Основы автоматики и микропроцессорной техники: Учеб. пособие. / Н.И. Бохан, Р.И. Фурунжиев. - Мн.: Ураджай, 1987.-376 с.: ил.123-129
4. Бородин И.Ф. Технические средства автоматики / И.Ф. Бородин. - М.: Колос,
1982. - с. 75-82.
5.Жеребцов И.П. Основы электроники. - 5-е изд., перераб. и доп. / И.П. Жеребцов. - Л.: Энергоатомиздат. Леннигр. Отд-ние, 1989. - 352 с.
67

ЛАБОРАТОРНА РОБОТА № 07
ДОСЛІДЖЕННЯ ВИКОНАВЧОГО ЭЛЕКТРОДВИГУНОВОГО МЕХАНІЗМУ
Мета роботи: Вивчення конструкції і зняття основних характеристик електродвигунового ВМ. Реалізація САУ засувкою трубопроводу за допомогою виконавчого механізму.
ПРОГРАМА РОБОТИ
1.Ознайомитися з конструкцією, принципом роботи й основними характеристиками електродвигунового механізму.
2.Вивчити роботу принципової електричної схеми автоматичного керування поворотним шибером.
3.Зняти і побудувати статичну характеристику залежності вихідної напруги блоку керування ВМ від кута повороту його вихідного валу. Визначити коефіцієнт передачі блоку керування виконавчого механізму.
4.Настроїти колійні вимикачі ВМ на розмикання при досягненні поворотним
шибером, керованим ВМ, крайніх положень (0 та 90 ).
5.УНДРС. Розрахувати передатну функцію ВМ.
ЗАГАЛЬНІ ВІДОМОСТІ
Виконавчі елементи систем автоматики призначені для відпрацьовування керуючого впливу, що приводить до зміни регульованого параметру об'єкту керування. Сигнал на виконавчі пристрої звичайно надходять із підсилювачів потужності. Виконавчий елемент, як правило, є складовою частиною приводу або сервомеханізму, що містить підсилювальні, перетворюючі, корегувальні елементи, елементи зворотних зв'язків.
По виду використовуваної енергії виконавчі елементи систем можна підрозділити на електричні, гідравлічні, пневматичні й комбіновані.
Будучи закінченим, найбільш потужним каскадом системи автоматичного керування, виконавчі елементи впливають на статичні й динамічні властивості системи в цілому. У будь-якому режимі роботи статичні й динамічні характеристики виконавчих пристроїв повинні задовольняти умовам стійкості системи й вимогам якості керування.
У виконавчому пристрої відбувається перетворення керуючого сигналу у вихідний механічний вплив (швидкість, прискорення, кутове або лінійне переміщення). Таким чином, при проектуванні систем керування вибір виконавчого елемента здійснюють виходячи з наявності виду джерела енергії, характеру руху регулювального органу, рівня потужності вхідного й вихідного сигналів, забезпечення необхідної точності й показників якості системи керування.
Як елемент системи автоматичного керування виконавчий пристрій повинен забезпечити необхідну амплітуду вихідних переміщень при зміні вхідного сигналу в робочому діапазоні частот.
До технічних вимог, пропонованим до виконавчих елементів систем, нале-
68

жать:
-високий рівень потужності, що забезпечує необхідні значення величини переміщення, швидкості й прискорення регулювального органу;
-висока швидкодія;
-великий коефіцієнт підсилення по потужності, що забезпечує максимальне значення питомої потужності;
-лінійність статичних характеристик;
-плавність регульованої швидкості переміщення в широких діапазонах;
-мала маса, габаритні розміри, вартість;
-зручність в експлуатації, висока надійність.
Виконавчі двигуни постійного струму. Серед електричних виконавчих при-
строїв широке поширення одержали електромагніти, електродвигуни постійного і змінного струму, крокові двигуни і електромагнітні муфти.
Виконавчі двигуни постійного струму найбільше повно задовольняють вимогам, пропонованим до виконавчих елементів систем. По способу збудження двигуни діляться на виконавчі двигуни з електромагнітним збудженням та збудженням від постійних магнітів. Двигуни з електромагнітним збудженням виконуються з незалежним, послідовним і змішаним збудженням. Із усього різноманіття виконавчих двигунів постійного струму необхідно виділити безколекторні двигуни із друкованою обмоткою якоря. Керування двигунами постійного струму може бути безперервними і імпульсним. Електродвигуном постійного струму з незалежним збудженням можна управляти як з боку якоря, так і з боку обмотки збудження (рис. 1).
При керуванні електродвигуном з боку обмотки збудження ланцюг якоря живиться від мережі незмінною напругою постійного струму UКЕР, а керуюча напруга подається на обмотку збудження UВ.
При цьому способі керування потрібна менша потужність сигналу ланцюга керування, що дозволяє використовувати в якості закінчених підсилювачів електронні, магнітні, напівп-
ровідникові та інші малопотужні підсилювачі.
До недоліків керування електродвигуном з боку обмотки збудження належать малий діапазон зміни швидкості, нелінійність статичних характеристик, збільшення порядку рівняння руху електродвигуна.
У системах автоматичного керування більш широке поширення одержав спосіб керування двигуном з боку якоря, тому що він дозволяє одержати широкий діапазон регулювання швидкості, плавність регулювання, відносну лінійність статичних характеристик, велику швидкодію.
При керуванні електродвигуном з боку якоря обмотка збудження отримує живлення незмінною напругою постійного струму UВ і створює магнітний потік збу-
дження ФВ.
Для збільшення швидкодії виконавчих двигунів застосовують двигуни постійного струму із плоским якорем, на якому обмотка нанесена друкованим способом (рис. 2). Якір 1 являє собою тонкий диск, виконаний з немагнітного матеріалу (текс-
69

толіту, алюмінію), по обидві боки якого знаходяться провідники обмотки 2. Окремі провідники з'єднуються один з одним через наскрізні отвори в диску 3. По поверхні торця диску сковзають срібно-графітові щітки 4. Збудження двигуна здійснюється постійним магнітом з полюсними наконечниками 5, що мають форму кільцевих сегментів. Магнітний потік збудження проходить аксіально через два повітряних зазори, немагнітний диск із друкованою обмоткою і замикається по кільцях з магніто- м'якої сталі 6, 7. При протіканні струму по обмоткам якоря на валу двигуна створюється обертаючий момент, розташований у площині диска якоря.
Електромеханічна постійна часу за рахунок малого моменту інерції дискового якоря знижується до 0,001...0,002 с, що є одною з основних переваг розглянутих двигунів.
Крім того, через незначну індуктивність обмотки якоря комутація не супроводжується іскрінням. Провідники друкованої обмотки перебувають у значно кращих умовах охолодження, чим провідники, покладені в пази звичайного якоря. Це дозволяє підвищити щільність струму в них і управляти електродвигуном за допомогою напівпровідникових підсилювачів. Механізоване виготовлення обмоток якоря здешевлює електродвигун.
До недоліків таких електродвигунів у порівнянні зі звичайним двигуном варто віднести більше низький ККД через збільшення магнітного зазору й обмежену довговічність
внаслідок зношування контактних поверхнів провідників обмотки якоря.
Одним з істотних недоліків виконавчих двигунів постійного струму є наявність ковзного контакту між щітками й колектором, що створює іскріння й радіоперешкоди. Надійність двигунів відносно низька через швидке зношування щіток, особливо при високих швидкостях обертання якоря.
Виконавчі двигуни змінного струму. У системах автоматичного керування широке поширення одержали як виконавчі пристрої двофазні асинхронні двигуни з короткозамкненим або тонкостінним порожнім ро-
тором.
Двофазні асинхронні двигуни мають на статорі обмотку керування і обмотку збудження, магнітні осі яких зрушені в просторі на 90 (рис. 3). При подачі на ці обмотки змінних напруг постійної амплітуди та зрушених по фазі на 90
(рис. 3). При подачі на ці обмотки змінних напруг постійної амплітуди та зрушених по фазі на 90 у магнітній системі двигуна виникає обертове магнітне поле, що захоплює за собою ротор.
у магнітній системі двигуна виникає обертове магнітне поле, що захоплює за собою ротор.
Ротор обертається в ту ж сторону, що й магнітне поле, але з меншою кутовою швидкістю. Різниця між кутовими швидкостями магнітного
поля й ротору характеризується ковзанням:
70