

3dok_toa / Лабораторні роботи / Методичка 1 семестр 2011
.pdfсилювача із зовнішнім позитивним зворотним зв'язком (характеристика 3). Крутість правої частини цієї характеристики зросла, отже, збільшився коефіцієнт підсилення МП по струму КI. Якщо залежність 2 прийме положення 4, то характеристика 1 прийме положення 5, тобто МП перейде в релейний режим роботи. Для роботи на лівій області характеристики 3 необхідно подати негативний сигнал керування. Крутість її стає набагато менше, а нахил - негативним. Отже, зворотний зв'язок міняє знак і стає негативним.
Введення зворотного зв'язку в магнітному підсилювачі приводить до того, що використати весь діапазон зміни вихідного сигналу стає можливим тільки при негативному або різнополярному вхідному сигналі, а це не завжди зручно. Усунути цей недолік можна за рахунок введення в схему МП зміщення. В якості обмотки зміщення використовується одна з обмоток керування. Відрізняються обмотки зміщення і керування тим, що в обмотці зміщення струм в процесі роботи незмінний. Тому за допомогою сигналу зміщення можна вибрати за початкову будь-яку робочу точку на характеристиці IНАВ = f(IВХ). Якщо після завдання сигналу зміщення змінювати сигнал керування у всьому діапазоні, то одержимо характеристику МП зміщення паралельно уздовж осі абсцис (рис. 6). На ній характеристика 4 відповідає негативному зміщенню, характеристики 2 і 3 - позитивному зміщенню, причому для 2 - й характеристики зміщення підібрано так, щоб при відсутності струму керування струм навантаження був мінімальним.
Якщо коефіцієнт позитивного зворотного зв'язка kЗЗ = 1/kІ, то, коефіцієнти підсилення стають рівними нескінченності. Практично внаслідок нелінійності основної характеристики вони при певному струмі керування зростають стрибком, і струм навантаження теж збільшується стрибком. У цьому режимі МП можна використати в якості безконтактного реле.
При цьому коефіцієнті зворотного зв'язка її прямолінійна характеристика перетинає характеристику керування магнітного підсилювача в трьох крапках 1, 7, 4 при ІКЕР = 0 (рис. 7, а). Коли струм керування не дорівнює нулю, пряма ОА зворотного зв'язку буде переміщатися паралельно самої собі вправо або вліво залежно від знаку сигналів в обмотці керування.
Рисунок 7 - Характеристики магнітного підсилювача в релейному режимі:
а- без обмотки зсуву; б - магнітного поляризованого реле; в - з обмоткою зміщення;
м- магнітного нейтрального реле.
Якщо струм керування МП поступово збільшувати, то крапка 1 плавно переходить у крапку 2. У випадку подальшого збільшення струму робоча точка стрибком переміщається в друге стійке положення 3, струм в навантаженні приймає зна-
51

чення І3, після чого міняється незначно. Якщо тепер струм ІКЕР знижувати до нуля, а потім збільшувати його у зворотному напрямку, то струм навантаження буде змінюватися відповідно до ділянки 3, 4, 5 характеристики керування МП, і при ІКЕР = ІВІДП струм навантаження ІНАВ стрибком зменшиться до значення І6.
Таким чином, значення ІКЕР = ІСПР відповідає струму спрацьовування, а значення ІКЕР = ІВІДП - струму відпускання магнітного поляризованого безконтактного реле (рис. 7, б).
Для одержання характеристики МП, аналогічній характеристиці нейтрального електромагнітного реле, МП необхідно доповнити обмоткою зміщення й пропустити через неї такий струм, щоб при відсутності струму керування пряма О'А перетнула характеристику МП всього лише в одній точці 1 (рис. 7, в). У цьому випадку стрибкоподібна зміна струму навантаження ІНАВ буде відбуватися тільки при позитивних значеннях струму керування (рис. 7, г). Характеристика МП в цьому режимі аналогічна характеристиці МП в режимі поляризованого реле, але зрушена від осі ординат на силу струму зміщення ІЗМ.
Перевага магнітного безконтактного реле - відсутність рухливих контактів, незалежність параметрів спрацьовування й повернення реле від його орієнтації в просторі, висока вібростійкість, іскробезпека і надійність. Недоліки його - велика маса й габарити та можливість керування тільки одним ланцюгом, у той час як у контактних реле одночасно можуть працювати де кілька пар контактів.
Передавальна функція магнітного підсилювача в загальному вигляді має такий вигляд:
(11)
Конструктивно МП це замкнутий магнітопровід, набраний із Ш - подібних пластин або тороїдального осердя, з кількома обмотками. Загальний вигляд представлено на рис. 8.
Рисунок 8 - Загальний вигляд деяких магнітних підсилювачів – ТУМ, УМЗП 25
На крайніх стрижнях магнітопроводу знаходяться дві секції силової обмотки змінного струму, а на середньому - обмотка керування і інші обмотки постійного струму. Щоб обмотка змінного струму не наводила ЕРС в обмотці керування і інших обмотках МП, їх розташовують на стержнях магнітопроводу так, що змінні магнітні потоки взаємно компенсуються.
Магнітні підсилювачі,що мають тільки одну обмотку керування однаково реагують на різноманітну полярність струму керування, причому з початку характерис-
52
тики (відносно нульової точки) при незначних струмах керування підсилення незначне.
Для побудови МП, чутливого до полярності сигналу, і збільшення коефіцієнта підсилення при незначних струмах керування застосовується так звана обмотка зміщення WЗМ, яка живиться від стабілізованого джерела постійного струму.
Ефективним методом підвищення коефіцієнту підсилення МП є введення зовнішнього і внутрішнього позитивних зворотних зв’язків. При внутрішньому зворотному зв’язку в МП зменшуються втрати в міді, зменшується його вага, підвищується коефіцієнт корисної дії і максимальна потужність. МП з зовнішнім зворотним зв’язком дають змогу широко регулювати КП, завдяки чому обмотки зворотного зв’язку виконуються з відводами або шунтуються резисторами.
Магнітні підсилювачі (МП) завдяки своїм суттєвим перевагам в ряді випадків витісняють електромашинні і електронні підсилювачі. Вони не мають рухомих частин, довгий час напрацювання, нечутливі до вібрацій і поштовхів. Пристрій працює безпосередньо від мережі змінного струму при значних коливаннях напруги. Коефіцієнт підсилення МП досить великий (103...106), завдяки чому їх можна використовувати як підсилювачі дуже слабких сигналів постійного струму. МП забезпечують можливість простого додавання кількох сигналів. Максимальна вихідна потужність МП досягає кількох десятків кіловат.
Однак МП має недоліки: значна інерційність і велика вага, залежність коефіцієнту підсилення від частоти і напруги джерела живлення, низький коефіцієнт потужності і викривлення кривої струму навантаження.
ОПИС ЛАБОРАТОРНОГО СТЕНДУ
Лабораторний стенд (рис. 9) складається з:
-магнітного підсилювача, який має дві робочі обмотки W1-2РОБ. та W3-4РОБ., які включені зустрічно послідовно, обмотку зворотного зв'язку WЗ.З., обмотку керування WКЕР. та обмотку зміщення WЗМ;
-комутаційної апаратури SА1…SА6. SА1 – загальне включення лабораторного стенду, SА2 – включення джерела змінного струму 36 В робочої обмотки, SА3 –
перемикач підключення обмотки зворотного зв'язку WЗ.З. магнітного підсилювача (положення "2"), в положенні "1" досліди властивостей магнітного підсилювача проводяться без обмотки зворотного зв'язку; SА4 – включення постійної
напруги для обмоток керування WКЕР. та обмотки зміщення WЗМ; SА5 – перемикач (з середнім положенням) зміни напрямку стабілізованого струму для обмот-
ки зміщення магнітного підсилювача WЗМ; SА5 – включення змінного резистору для шунтування обмотки зворотного зв'язку;
-регулюючого приладу R2 обмотки керування; навантаження магнітного підсилювача RНАВ;
-регулюючого приладу R3 для шунтування обмотки зворотного зв’язку WЗ.З.;
-стабілізованого джерела живлення обмотки зміщення (R2, VD9); джерела постійного струму 12 В (VD1…VD4, С1);
-запобіжника FU; світлової сигналізації включення лабораторного стенду HL1;
-трансформатору живлення TV;
53
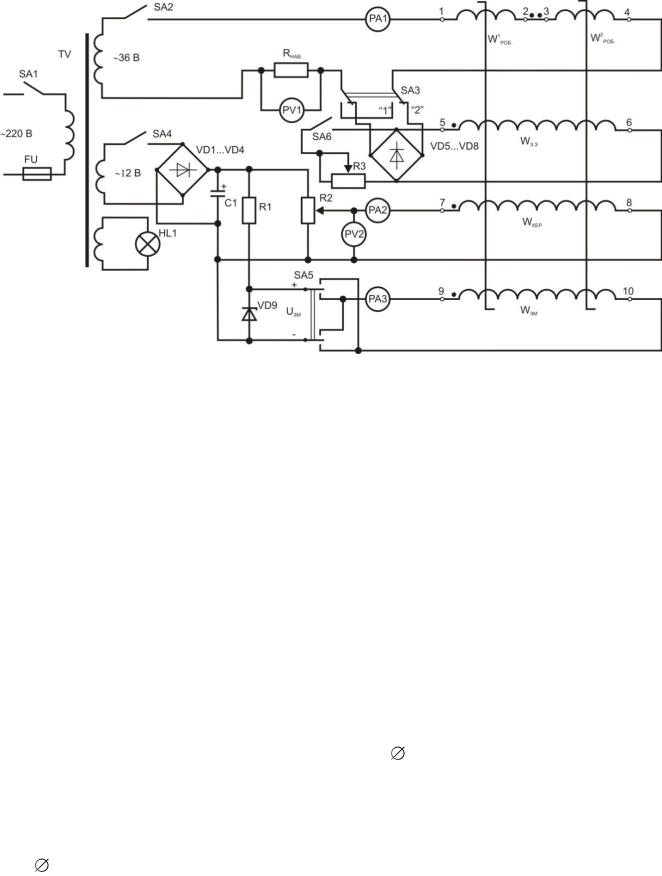
-вимірювальних приладів - мікроамперметрів (РА1…РА3) і вольтметрів (РV1…РV2).
Рисунок 9 - Принципова електрична схема стенду досліду властивостей магнітного підсилювача
Для виконання дослідів необхідно включити перемикач SА1 при цьому засвітиться HL1.
ВИКОНАННЯ ДОСЛІДЖЕНЬ
В лабораторній роботі використовується магнітний підсилювач, який має такі
паспортні дані: |
|
|
Напруга живлення робочих обмоток (припустиме) |
- 36 В. |
|
Номінальний опір навантаження |
- 105 Ом. |
|
Номінальні струми |
|
|
- |
навантаження |
- 0,15 мA. |
- |
керування |
- 5 мА. |
- |
зміщення |
- 19 мА. |
- |
зовнішнього зворотного зв'язку |
- 0,2 мA. |
Обмотувальні дані:
обмотки |
№ |
, мм |
W |
R, Ом |
робоча |
1-2; 3-4 |
0,38 |
720 |
6,5 |
керування |
7-8 |
0,14 |
2200 |
204 |
зміщення |
9-10 |
0,15 |
3100 |
204 |
зовнішнього зворотного зв'язка |
5-6 |
0,27 |
100 |
2,75 |
( - діаметр проводу обмоток, W - число витків, R - опір проводу обмоток).
1. Перевірити положення перемикачів SA2, SA4 та SA6 (вимкнуто), SA3 в положення "1", SA5 в положення "0", регулятор R2 в крані лівому положенні;
54
2.Включити лабораторний стенд вимикачем SA1 (при цьому загориться індикаторна лампа (світлодіод) HL1);
3.Зробити досліди магнітного підсилювача у різних режимах.
3.1Дослід магнітного підсилювача без обмоток зміщення і зворотного зв’язку.
3.1.1Встановити перемикач SA3 в положення "1" (тобто відключено зовнішній зворотній зв'язок).
3.1.2Включити перемикач SA2 – подати на робочі обмотки змінну напругу 36 В. Зафіксувати початкові значення струму і напруги на приладах РА1 та РV1. Результати занести до таблиці 1.
3.1.3Включити перемикач SA4. Змінюючи струм через 20 мА від 0 до 100 мА на обмотці керування (регулятором R2) встановити залежність I1НАВ = f (IКЕР). Результати занести до таблиці 1.
3.1.4Встановити перемикачі SA2, SA4 та регулятором R2 в початковий стан.
3.2Дослід магнітного підсилювача з обмоток зміщення.
3.2.1Включити перемикач SA2 – подати на робочі обмотки змінну напругу 36 В. Зафіксувати початкові значення струму і напруги на приладах РА1 та РV1. Результати занести до таблиці 1.
3.2.2Включити перемикач SA4.
3.2.3Встановити перемикач SA5 в положення "+".
3.2.4Змінюючи струм від 0 до 100 мА через 20 мА на обмотці керування (регулятором R2) встановити залежність I2НАВ = f (IКЕР) при різних значеннях полярності напруги на обмотці зміщення (перемикаючі в контрольних точках перемикач з полярності "+" на полярність "-". Результати занести до таблиці 1.
3.2.5Встановити перемикачі SA2, SA4 та регулятором R2 в початковий стан, а перемикач SA5 в положення "0".
3.3Дослід магнітного підсилювача із зовнішнім зворотним зв’язком.
3.3.1Встановити перемикач SA3 в положення "2" (тобто включено зовнішній зворотній зв'язок).
3.3.2Включити перемикач SA2 – подати на робочі обмотки змінну напругу 36 В. Зафіксувати початкові значення струму і напруги на приладах РА1 та РV1. Результати занести до таблиці 1.
3.3.3Включити перемикач SA4. Змінюючи струм від 0 до 100 мА через 20 мА на обмотці керування (регулятором R2) встановити залежність I3НАВ = f (IКЕР). Результати занести до таблиці 1.
3.3.4Встановити перемикачі SA2, SA4 та регулятором R2 в початковий стан.
3.4Дослід магнітного підсилювача в релейному режимі.
3.4.1 Встановити перемикач SA3 в положення "2" (тобто включено зовнішній зворотній зв'язок). Результати занести до таблиці 1.
3.4.2Включити перемикач SA2 – подати на робочі обмотки змінну напругу 36 В. Зафіксувати початкові значення струму і напруги на приладах РА1 та РV1.
3.4.3Включити перемикач SA6.
3.4.4Включити перемикач SA4.
3.4.5Збільшуя опір резистору R3 перевести магнітний підсилювач в релейний режим.
3.4.6Змінюючи струм від 0 до 100 мА через 20 мА на обмотці керування (ре-
55

гулятором R2) встановити залежність I4НАВ = f (IКЕР). Результати занести до таблиці 1.
4.Встановити перемикачі SA2, SA4 регулятор R2 в початковий стан а перемикач SA5 в положення "0".
5.Виключити лабораторний стенд вимикачем SA1 (при цьому погасне індикаторна лампа (світлодіод) HL1).
6.Оформити звіт.
Таблиця 1 – Дослідні данні магнітного підсилювача
Схеми досліду магнітних підсилювачів
без зміщення і |
|
з обмоткою |
|
|
із зовнішнім |
в релейному |
||||||||||||||||
зворотного |
|
|
|
|
зворотним |
|
||||||||||||||||
|
|
зміщення |
|
|
|
|
|
режимі |
|
|||||||||||||
|
зв’язку |
|
|
|
|
|
|
|
зв’язком |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
мА, |
В, |
мА, |
В, |
мА, |
В, |
|
, мА |
, мА |
|
, В |
, В |
мА, |
|
В, |
мА, |
|
В, |
мА, |
|
В, |
мА, |
В, |
КЕР |
КЕр |
НАВ |
НАВ |
КЕР |
КЕр |
|
НАВ |
НАВ |
|
НАВ |
НАВ |
КЕР |
|
КЕр |
НАВ |
|
НАВ |
КЕР |
|
КЕр |
НАВ |
НАВ |
I |
U |
І |
U |
I |
U |
|
"+"І |
І"-" |
|
U"+" |
U""- |
I |
|
U |
І |
|
U |
I |
|
U |
І |
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОФОРМЛЕННЯ ЗВІТУ
Звіт повинний мати:
1.Тему і мету лабораторної роботи.
2.Стислі теоретичні дані по даній темі.
3.Схему досліду.
4.Паспортні данні магнітного підсилювача.
5.Статичні характеристики магнітного підсилювача I1НАВ = f (IКЕР), I2НАВ = f (IКЕР), I3НАВ = f (IКЕР) та I4НАВ = f (IКЕР).
6.Визначити коефіцієнт підсилення по струму КІ, по напрузі КU і потужності КР, ко-
ристуючись рівняннями:
(12)
де ІНАВ, UНАВ, PНАВ – відповідно прирощення струму, напруги і потужності навантаження;
ІКЕР, UКЕР, PКЕР - відповідно прирощення струму, напруги і потужності керування.
Коефіцієнти підсилення для кожної схеми рекомендується визначити для одного і того ж струму керування (що відповідає крутому підйому правої частини побудованої характеристики 7. Висновки по лабораторній роботі.
КОНТРОЛЬНІ ПИТАННЯ
56
1.Які функції виконують підсилювачі в системах автоматики?
2.Якими параметрами характеризуються магнітні підсилювачі?
3.Які вади і недоліки мають магнітні підсилювачі в порівнянні з іншими підсилювачами?
4.Поясніть принцип дії МП по різним схемам підключення.
5.Чим різниться розташування обмоток постійного струму МП на магнітопроводі від обмоток змінного струму.
6.Для чого потрібні і як діють обмотки зміщення і зворотного зв’язку МП?
7.Із яких міркувань вибирають той чи інший тип зворотного зв’язку?
8.Чим відрізняється розташування обмоток постійного струму магнітного підсилювача на магнітопроводі від обмоток змінного струму?
9.Чим відрізняється обмотка зміщення від обмотки керування?
10.Чим відрізняється струм обмотки зміщення від струму обмотки керування?
11.Для чого використовуються і як діють обмотки зміщення і зворотного зв’язку магнітного підсилювача?
12.Як реагує нереверсивний магнітний підсилювач на зміну знака керуючої напруги?
13.Як впливає на коефіцієнт підсилення магнітного підсилювача зміна частоти і напруги змінного струму?
14.Як впливає коефіцієнт зворотного зв’язку на коефіцієнт підсилення по струму і по потужності?
ЛІТЕРАТУРА
1.Усилители магнитные. Термины и определения. ГОСТ 17561-84 [Чинний від 01.01.1986]. – М.: Комитет стандартизации и метрологии СССР, 1986. –7 с. - Государственный стандарт СССР
2.Келим Ю.М. Электромеханические и магнитные элементы систем автоматики: Учеб. пособие для средн. проф. учеб. заведений / Ю.М. Келим. – 2-е изд., исправл. и доп. – М.: Высш. Шк., 2004. – 352 с.
3.Бородин И.Ф. Основы автоматики и автоматизация производственных процессов / И.Ф. Бородин, Н.И. Кирилин - М.: Колос, 1977. с.135...142.
4.Бородин И.Ф. Технические средства автоматики / И.Ф. Бородин. - М.: Колос, 1982. с.141...151.
5.Бородин И.Ф. Практикум по основам автоматики и автоматизации производственных процессов / И.Ф. Бородин, Н.И. Кирилин. - М. Колос, 1974 с. 203...209
6.Квартин М.И. Электромеханические и магнитные устройства автоматики : Учебник для учащихся электроприборостроительных техникумов / М.И. Квартин. – М.: Высш. Школа, 1979. – 352 с.
7.Урин В.Д. Наладка магнитных усилителей. / В.Д. Урин. – М.: Энергия, 1974. – 64 с. Библиотека электромонтера № 399
57

ЛАБОРАТОРНА РОБОТА № 06
ДОСЛІДЖЕННЯ СТАБІЛІЗАТОРІВ ПОСТІЙНОГО ТА ЗМІННОГО СТРУМУ, ЯК ЕЛЕМЕНТІВ АВТОМАТИКИ
Мета роботи: Ознайомитися з конструкцією і принципом дії параметричного ферорезонансного стабілізатору змінної напруги і компенсаційного стабілізатору постійної напруги та провести досліди їх характеристик.
ПРОГРАМА РОБОТИ
1. Вивчити будову та принцип роботи ферорезонансного стабілізатору змінної напруги і компенсаційного стабілізаторів напруги.
2. Вивчити будову та принцип роботи компенсаційного стабілізатору постійної напруги.
3. Провести досліди ферорезонансного стабілізатору змінної напруги та за отриманими даними побудувати залежності:
3.1 вихідної напруги від вхідної UВИХ = f(UВХ) на холостому ходу;
3.2 вихідного струму і ККД від вхідної напруги IВИХ = f(UВХ), = f(UВХ) при навантаженні;
3.3 вихідну напругу і ККД від струму навантаження UВИХ =f(IВИХ); = f(IВИХ) при незмінній живлячій напрузі UВХ = 220 В і змінному опору навантаження;
4. Провести досліди компенсаційний стабілізатор постійної напруги і за отриманими даними побудувати залежності вихідної напруги від вхідної UВИХ = f(UВХ).
5. За отриманими дослідними даними знайти коефіцієнти стабілізації стабілізаторів змінної і постійної напруги.
ЗАГАЛЬНІ ВІДОМОСТІ
Стабілізатором називають пристрій, що автоматично підтримує сталість яко- го-небудь параметра
В електричних ланцюгах автоматики доводиться стабілізувати напругу, струм, частоту, магнітний потік, а частіше виникає необхідність у стабілізації постійної й змінної напруг.
Для задовільної роботи схем автоматики звичайно виявляється достатнім підтримувати напругу незмінною на рівні відхилень ±1...5…5% від номінального значення. Іноді така точність недостатня й повинна бути істотно підвищена. Так, наприклад, для окремих вузлів сучасних вимірювальних пристроїв, що забезпечують точність виміру понад 0,1%, напругу живлення необхідно стабілізувати в межах ±0,01 %, тобто на порядок вище точності вимірювальних пристроїв. Стабілізувати напругу та струм можна за допомогою елементів, що мають нелінійну ВАХ, а також за допомогою систем автоматичного регулювання.
По принципу дії електричні стабілізатори прийнятий розділяти на два класи:
58

-параметричні;
-компенсаційні.
Параметричні стабілізатори мають нелінійні, активні або реактивні елементи, опори яких залежать від струму або напруги. З активних нелінійних елементів у стабілізаторах використається баретер, термістор, стабілівольт, напівпровідникові стабілітрони і тріоди, а з реактивних нелінійних елементів - нелінійний конденсатор (варикап) і котушка з насиченим феромагнітним сердечником. На реактивних нелінійних елементах можуть виконуватися стабілізатори тільки змінної напруги або струму.
Компенсаційні стабілізатори це замкнута автоматична система регулювання, у якій напруга на виході порівнюється з еталонною (опорною) напругою. Різниця напруг подається на вхід підсилювальної схеми, що компенсує відхилення вихідної напруги. Таким чином, компенсаційні стабілізатори контролюють напругу навантаження, тому точність їх дії значно вище, ніж у параметричних.
Точність стабілізації визначається коефіцієнтом стабілізації, що показує, у скільки разів відносна зміна вхідної напруги більше відносної зміни вихідного (стабілізованого) напруги при постійному навантаженні
S |
UВХ |
|
UВИХ |
|
UВИХ |
|
dUВХ |
UВИХ |
|
UВХ |
|
UВХ |
|
dUВИХ |
|
|
|
|
|
Крім коефіцієнта стабілізації стабілізатори характеризуються вихідним опором при постійній напрузі на вході:
RdUВИХ
dUВХ
і коефіцієнтом корисної дії (ККД)
UВИХ  IВИХ
IВИХ
UВХ  IВХ
IВХ
Стабілізатори змінної напруги і струму. Ці стабілізатори як правило викону-
ються на феромагнітних елементах. Принцип дії найпростішого феромагнітного
стабілізатору ілюструє рисунок 1, а. Первинні обмотки |
1 |
і |
1 |
двох трансформато- |
|
|
|
рів 1 і 2 включені послідовно й приєднані до джерела живлення, напруга якого може
змінюватися в широких межах. До з'єднаного зустрічно вторинним обмоткам |
2 |
і |
|
|
2 приєднується навантаження, напругу на якій необхідно підтримувати постійною.
Трансформатор 1 працює в насиченому режимі, а трансформатор 2 у ненасиченому. Завдяки цьому при зміні напруги UВХ вторинні напруги трансформаторів Uвых і
Uвых будуть змінюватися різним способом (рис. 1, б).
Коефіцієнти трансформації трансформаторів підбирають такими, щоб на ділянці можливих коливань напруги UВХ від Umin до Umax криві  і
і  мали однако-
мали однако-
вий кут нахилу до осі абсцис (рис. 1, б). У цьому випадку вихідна напруга не буде залежати від первинної напруги, тому що
UВИХ UВИХ UВИХ
59

а) |
б) |
в) |
|
Рисунок 1 - Феромагнітний стабілізатор напруги |
|
Упрактичних схемах замість двох трансформаторів використовується один із
Ш- подібних магнітопроводів (рис. 1, в). Первинна обмотка розташовується на середньому стрижні, а вторинні - відповідно на правом (насиченому) і левом (ненасиченому), які включаться зустрічно.
Феромагнітні стабілізатори виготовляються на невеликі потужності (до 10...20
ВА), оскільки мають досить низькі значення ККД і коефіцієнту потужності ( = 50%, cos = 0,4), а також великі питомі витрати матеріалу обмоток і магнітопроводу.
На практиці одержали поширення параметричні ферорезонансні стабілізатори, у яких використовується фізичне явище - ферорезонанс струмів або напруг.
На рисунку 2, а і б наведена схема й характеристика стабілізатору з ферорезонансом струмів. Стабілізатор складається з послідовно включених насиченого 1 і ненасиченого 2 трансформаторів. Паралельно до частини первинної обмотки трансформатору підключається ємність С. За принципом дії ферорезонансні стабілізатори практично нічим не відрізняються від феромагнітних, однак внаслідок резонансу струмів крива UВИХ UВИХ UВИХ на робочій ділянці в них більш полога і коефіцієнт стабілізації значно вище.
а) б) Рисунок 2 - Ферорезонансний стабілізатор напруги
Ферорезонансні стабілізатори мають деякі недоліки: залежність вихідної напруги від зміни частоти, а також якості стабілізації від навантаження й коефіцієнта
60