

СПКД123 / СПДК / Задачи АСУТП / Лекция 14. Выбор структуры территориально-распределенных систем управления
.docЛекция 14. Выбор структуры территориально распределенных систем управления
Содержание лекции:
-
Постановка задачи выбора структуры распределенных систем управления
-
Схема метода решения задачи
-
Методы распределения задач в распределенной системе управления
-
Пример задачи выбора технической структуры системы телемеханики
-
Постановка задачи выбора структуры распределенных систем управления
Содержательная постановка задачи выбора структуры территориально распределенной системы управления (ТРСУ) на начальной стадии создания может быть сформулирована следующим образом: заданы возможные варианты иерархического построения системы; множество вычислительных и диспетчерских задач, их характеристики и взаимосвязи; множество состояний системы, в которых на заданном уровне отказоустойчивости требуется поддержать работоспособность; возможные виды технических средств, каналов связи и их характеристик; регламентированные стоимостные, надежностные и временные показатели; статистические данные о поступлении в систему из внешних источников заявок на решение задач; модели объектов управления. Требуется найти такой вариант структуры ТРСУ, который минимизирует целевую функцию, учитывающую стоимость и отказоустойчивость системы, при соблюдении указанных условий и ограничений. Структура сложной системы управления (в т.ч. ТРСУ) в общем случае определяется как способ организации целого из составных частей. Поскольку составными частями (элементами) ТРСУ являются уровни и узлы управления, функциональные задачи, технические средства, диспетчерские ресурсы, то структура есть вариант последовательного (возможно неоднократного) отображения одного множества элементов ТРСУ на другое и представляет собой сочетание следующих структур:
-
Иерархической, определяемой как древовидный граф, вершины которого соответствуют узлу ТРСУ, а ребра отражают отношение подчиненности, т.е. принципы организации управления. Конкретную реализацию иерархической структуры назовем вариантом иерархического построения (ВИП).
-
Функциональной, определяемой как отображение множества задач ТРСУ на множество узлов системы. Конкретный результат такого отображения на заданный ВИП назовем вариантом распределения задач (ВРЗ).
-
Технической, определяемой перечнями технических средств для узлов и возможных видов сетей передачи данных для ребер графа иерархической структуры. Конкретный состав, характеристики и взаимосвязи технических средств, реализующих при данном ВИП данный ВРЗ, назовем вариантом технической структуры (ВТС).
Вариант структуры ТРСУ определяется как сочетание ВИП, ВРЗ, ВТС, математическое описание ВИП, ВРЗ и ВТС как композиции элементов ТРСУ формируется посредством задания отношений связности. Поскольку на эффективность ТРСУ в первую очередь влияют стоимостные и надежностные показатели, в качестве комплексного критерия потерь эффективности предлагается функционал J0, учитывающий приведенные к единице времени затраты на решение задач в узлах системы J1, затраты на передачу информации J2 и потери эффективности системы от нерешения задач при отказе узлов аппаратуры J3, т.е. J0 = J1 + J2 + J3. На основании формализованного описания элементов ТРСУ и вводимых ниже параметров и переменных постановка задачи проектирования структуры ТРСУ может быть сформулирована в виде задачи математического программирования. Критерий J0включает ряд задаваемых и расчетных параметров, характеризующих структуру ТРСУ, на который накладываются ограничения.
-
^ Схема метода решения задачи
Традиционным подходом к решению целочисленных задач большой размерности является разбиение общей задачи на совокупность подзадач. Для задач выбора структуры ТРСУ разумным является разбиение, соответствующее данному выше определению варианта структуры как последовательности отображений ВИП, ВРЗ, ВТС. Опуская формальные постановки частных задач выбора вариантов структур, цепочка отображений элементов ТРСУ, реализующая вариант структуры ТРСУ, может быть выполнена с помощью следующего эвристического алгоритма:
-
Выбрать ВИП и сформировать подмножество решаемых задач при этом ВИП.
-
Сформировать исходное множество допустимых вариантов структур на основе различных значений одной или нескольких обобщенных характеристик элементов ТРСУ. Назовем его множеством обобщенных допустимых вариантов (МОДВ) структуры. Каждый из вариантов представляет собой множество вариантов структуры с выбранным уточненным ВТС и проведенным размещением задач. Принимается, что МОДВ обладает тем свойством, что любой обобщенный вариант структуры, не вошедший в МОДВ, не является оптимальным.
-
В каждом из обобщенных вариантов провести выбор оптимального уточненного варианта. Полученное множество локально-оптимальных вариантов назовем суженным множеством допустимых вариантов (СМДВ).
-
Сравнить между собой все варианты из СМДВ по критерию J0 и получить лучший.
Этот вариант будет тем ближе к оптимальному варианту структуры, чем более представительным было исходное МОДВ. Оценка близости полученного рационального и оптимального вариантов может быть сделана, если возможен полный перебор, дающий возможность найти оптимальный вариант. На практике единственная возможность оценить качество решения – сравнить его с имеющимися реальными и проектируемыми структурами ТРСУ. Исходя из данного подхода, укрупненно, схема решения должна состоять из четырех последовательно выполняемых стадий:
-
подготовительная;
-
формирование МОДВ на основе обобщенных характеристик ВТС узлов и предварительного распределения задач по уровням и узлам системы;
-
формирование СМДВ на основе выбора ВТС системы и с учетом результатов оптимального резервирования задач;
-
сравнительный анализ вариантов из СМДВ и принятие решения.
Каждая из стадий состоит из нескольких этапов. Первая стадия состоит из двух этапов: выбора иерархической структуры и формирования функционального графа (ФГ) на подмножестве задач, решаемых в системе при выбранном варианте иерархии. На первом этапе процедуры совместно с проектировщиками объекта управления с учетом ряда неформализуемых факторов выбирается один или несколько вариантов иерархии. Дальнейшее построение вариантов структуры ведется для каждого ВИП, оставленного для рассмотрения. На втором этапе из заданного полного множества задач выбирается подмножество задач, решаемых при определенном ВИП и на них стоится ФГ, определяющий характеристики задач и информационные взаимосвязи между ними. Эти два этапа позволяют зафиксировать исходные данные, необходимые для определения структуры ТРСУ. На второй стадии формируется МОДВ, каждый вариант которого описывается задаваемым вектором значений обобщенных ресурсов (вычислительных и диспетчерских) узлов и распределения задач между узлами системы. (Задание в качестве ведущего элемента обобщенных ресурсов узлов объясняется тем, что это требует минимума априорной информации для получения общих характеристик возможных ВТС, кроме того, для конкретной ВТС может быть определен диапазон изменения значений обобщенных ресурсов). На третьей стадии из множества детализированных до требуемой степени ВТС, составляющих один обобщенный вариант (т.е. реализующих один ВРЗ), выбирается локально-оптимальный вариант структуры, для чего решаются две связанные итеративной процедурой задачи: сначала задача выбора оптимального ВТС системы, а затем для найденного ВТС одна и та же задача РЗ. Нарушение на этапе выбора ВТС ограничений по надежности влечет не автоматическое отсечение варианта, а поиск программным путем или с помощью интерактивного диалога заменяющего его варианта с техническим резервированием. Итеративная процедура организуется также на втором этапе. Ограничения, накладываемые на выбор элементов структуры, усиливаются по мере конкретизации вариантов структуры. Так, например, расширяется число проверяемых временных характеристик. Количество вариантов, входящих в МОДВ, меньше или равно количеству взятых для рассмотрения векторов обобщенных ресурсов. Уменьшение числа обобщенных вариантов на этой стадии может производиться за счет отбрасывания вариантов с заведомо непригодным для дальнейшего рассмотрения распределением задач. Значение мощности СМДВ колеблется вблизи значения мощности МОДВ, т.к. с одной стороны происходит исключение непригодных вариантов, но с другой – порождение дополнительных вариантов за счет проведения технического и функционального резервирования. На последней стадии проводится сравнительный анализ всех СМДВ, полученных для каждого из оставленных для рассмотрения иерархических вариантов. При наличии нескольких близких по комплексному критерию потерь эффективности вариантов окончательное решение принимает проектировщик, который является активным участником процедуры и на других этапах. В методах решения задач этапов также учитывается специфика ТРСУ.
-
^ Методы распределения задач в распределенной системе управления
Множество задач ТРСУ идентифицируется (при заданном ВИП) в виде графа задач или функционального графа (ФГ), представляющего собой ориентированный граф, вершины которого соответствуют задачам, а дуги – информационным связям между задачами. При создании ФГ необходимо:
-
Определить степень детализации задачи как элемента ФГ.
-
Определить связи задач (вычислительных и диспетчерских) в ФГ.
-
Определить характеристики задач и связей между ними.
-
Провести анализ ФГ.
При формировании характеристик вычислительных задач необходимо учитывать класс ЭВМ, на который ориентирована задача. Если возможно решение задачи на ЭВМ разных классов, то в массивах входной информации должны быть представлены альтернативные варианты таких характеристик, как, например, время решения, емкость требуемой памяти и т.п. В ФГ можно не включать задачи, входящие в стандартное ПО ЭВМ, а также задачи обслуживания подсистем ТРСУ, например драйверы связи с устройствами отображения, задачи приема/передачи информации, СУБД и т.п. В ФГ необходимо включать диспетчерские задачи, что связано с существенным влиянием, которое они оказывают на информационные потоки, интенсивность решения ряда вычислительных задач, стоимость дополнительных компонентов ВТС узлов и т.д. Если до начала проектирования ВРЗ известно, какие задачи должны быть дублированы, то такие дубли также следует включать в ФГ, с указанием запрета на размещение дублей задач в одном узле с оригиналами. Анализ полученного ФГ позволяет провести возможное агрегирование задач, выделить подграфы с задачами, участвующими в прохождении определенного типа информации (например, аварийных сигналов), удалить лишние связи и т.п. После выбора ВИП системы и организации ФГ, т.е. этапов, образующих предварительную стадию выбора структуры, следует образовать множество обобщенных вариантов структуры. Для этого необходимо распределить задачи для каждого из выбранных наборов значений обобщенных ресурсов узлов. Если система однородная, то распределение задач в ней ведется между узлами – представителями иерархических уровней. Распределение задач является сложной (NP-трудной) [Гэри82] комбинаторной проблемой. Ниже мы рассмотрим эвристический «жадный» [Гудман81] алгоритм локальной оптимизации переборного типа для однородной ТРСУ. Ядро алгоритма составляет процедура оптимального распределения задач между двумя уровнями по критерию минимума суммарного информационного обмена в системе. Для двухуровневой задачи показана сходимость к оптимальному решению алгоритмов такого типа [Рейнгольд80], для многоуровневой системы с заданной иерархической структурой на первой итерации берется крайний, например, верхний иерархический уровень и объединенный нижний уровень, состоящий из всех уровней, кроме верхнего. На следующей итерации из этого объединенного уровня вновь выделяется верхний и т.д., пока задачи не будут распределены по всем уровням. Схема алгоритма следующая:
-
все незакрепленные директивно задачи условно включаются в множество задач, решаемых на верхнем уровне (начальная централизация системы);
-
при нарушении ресурсных ограничений на верхнем уровне и наличии на нижнем уровне свободных ресурсов задачи начинают переводиться на нижний уровень последовательно, в порядке возрастания показателя: отношения изменения объема передаваемой между задачами информации к сумме обобщенных ресурсов вычислительных и диспетчерских задач.
-
перевод задач, описанный в п. 2, продолжается, пока не выполнятся ресурсные ограничения либо произойдет остановка работы алгоритма из-за невозможности найти допустимое решение. Если же допустимое решение найдено, то вычисляется значение критерия J2 на данной итерации.
-
переводом на нижний уровень задачи последовательно по возрастанию значения , производится максимально возможное уменьшение значения критерия;
-
когда все задачи распределены между двумя уровнями при минимально возможном , из нижнего обобщенного уровня выделяется верхний и вся процедура повторяется заново для задач, входящих в множество задач обобщенного уровня.
Общая идея алгоритма состоит в нахождении допустимого плана распределения задач между двумя уровнями с помощью показателя, учитывающего как информационные обмены, так и ресурсы задач, а затем улучшении допустимого плана с точки зрения уменьшения суммарного информационного обмена между уровнями [Бернер85]. Если структура ТРСУ неоднородная, то при одинаковых основных функциях узлов одного уровня (неоднородность заключается, например, в количестве управляемых объектов), после распределения задач по уровням необходимо провести распределение задач между узлами, предварительно сгруппировав однородные узлы и действуя по описанной выше стратегии: сначала распределить задачи между одним узлом (или группой однородных узлов) и остальными, представляемыми как один обобщенный узел, затем из обобщенного узла выделить следующий и т.д. Аналогичную стратегию можно применить для одноуровневых систем управления или РСУ, базирующихся на малых локальных вычислительных сетях. В случае, если на одном уровне иерархии различные узлы осуществляют контроль и управление различными технологическими процессами, следует разделить ресурсы верхнего уровня пропорционально ресурсам задач управления этими процессами и распределять задачи, входящие в определенный подграф ФГ, для каждого процесса в отдельности, а затем провести соединение подграфов в один ФГ и сведение распределений задач в один ВРЗ.
-
^ Пример задачи выбора технической структуры системы телемеханики
Выше
рассмотрены комплексные методы синтеза
структуры системы управления. Однако
часто требуется решать частные задачи
выбора конфигурации технических средств,
относящиеся к классу задач размещения,
минимизируя общую стоимость системы.
Ниже рассмотрен пример решения задачи
размещения оборудования при создании
системы телемеханики нефтегазового
промысла.
Постановка
задачи
При
автоматизации нефтегазовых промыслов
возникает необходимость выбрать места
установки и количество контролируемых
пунктов (КП), центральным элементом
каждого из которых является
многофункциональный технологический
контроллер. Контроллер выполняет ввод
и первичное преобразование измерений
датчиков, их хранение, передачу по
радиоканалу верхнему уровню системы
управления.
Используя
метод экспертных оценок (см. далее),
получим множество возможных пунктов
размещения КП на местности. Обозначим
его как I =
{1, …, m}.
При установке на каждом из этих мест к
контроллеру можно подключить датчики
одного или нескольких кустов скважин.
Примем стоимость установки КП для
каждого из мест i эквивалентной
и равной c,
поскольку все компоненты КП, такие как
процессорный и коммуникационный модули
контроллера, источник питания,
радиостанция, шкаф КП и проч. являются
одинаковыми, а различия возможны только
в требуемом количестве плат ввода при
использовании аналоговых датчиков с
токовым выходом. Однако экономия на
количестве каналов ввода во многом
нивелируется за счет невозможности
полностью серийного производства КП,
необходимости делать индивидуальный
проект и т.д.
Мы
вводим ограничение по мощности контроллера
(максимально возможному количеству
входных каналов). Обозначим его ^ R.
Перечень
кустов скважин J =
{1, …, n} определен
технологией добычи. Тогда для каждой
пары ij можно
указать стоимость подключения датчиков
куста j к
контроллеру i, равную
произведению расстояния lij на
количество подключаемых датчиков куста
скважин aj.
Требуется определить количество КП,
места их установки и схему подключения
датчиков к ним, при котором датчики всех
кустов скважин будут подключены с
наименьшими общими затратами на
оборудование КП и кабельные проводки.
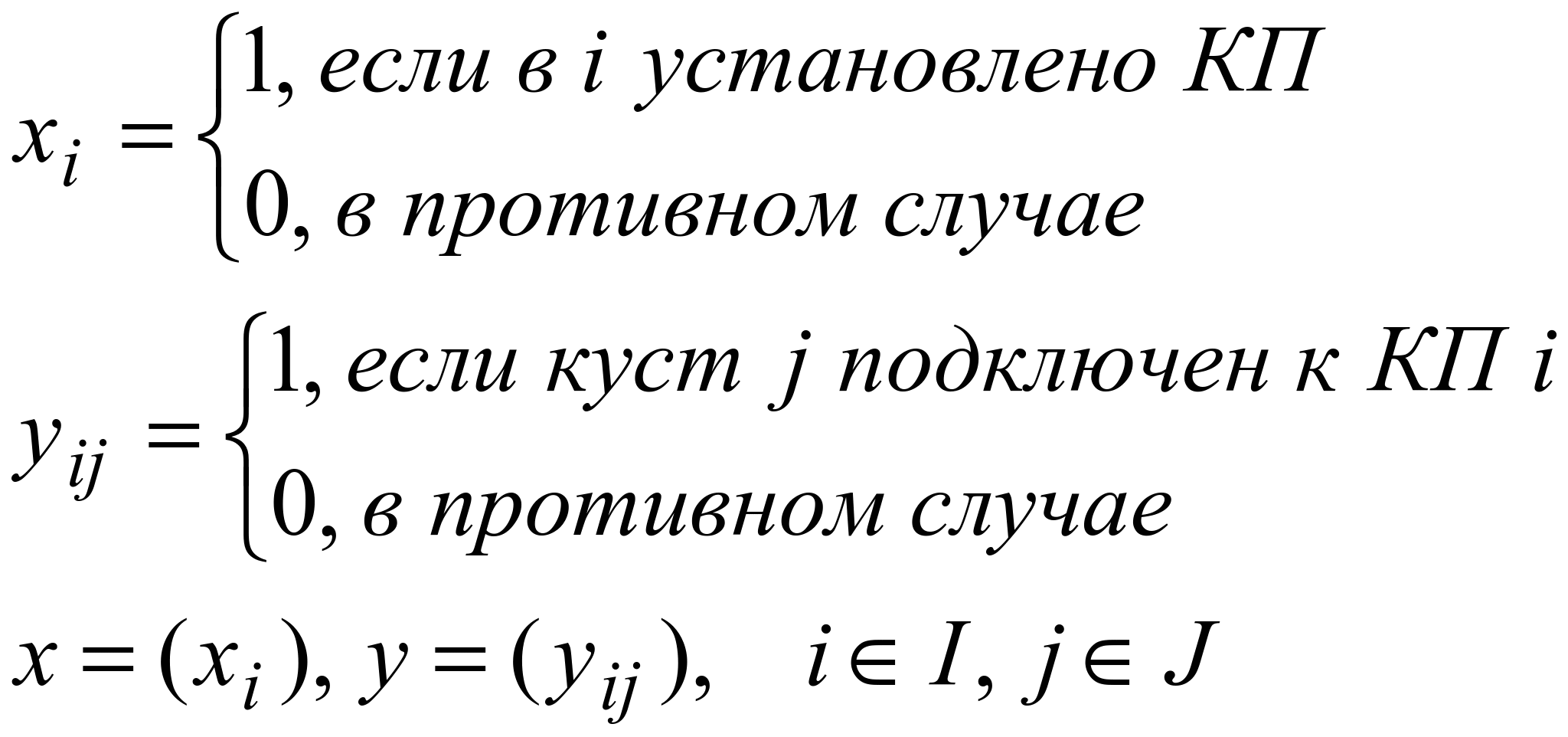
Введем
следующие булевы переменные, значения
которых нам требуется найти:
 Тогда
целевая функция может быть записана в
виде:
Тогда
целевая функция может быть записана в
виде:
|
|
(1) |
При условиях:
|
|
(2) |
|
|
(3) |
|
|
(4) |
Сформулированная
задача является простейшей задачей
размещения [Колоколов96] дискретного
программирования. Данная задача является
NP-трудной. Существуют три основные
группы методов решения подобных задач
[Сигал02]: методы отсечения, комбинаторные
методы (последовательного анализа
вариантов, ветвей и границ и др.),
приближенные методы.
Эвристический
алгоритм
Мы
предлагаем приближенный эвристический
алгоритм решения задачи (1)-(4), относящийся
к классу «жадных» (greedy) алгоритмов.
Основываясь на специфике предметной
области и не обоснованных строго
предположениях о признаках оптимального
решения, мы решаем «локальную» задачу
оптимизации на каждом шаге алгоритма
вместо глобальной оптимизации
решения.
Первое
предположение предлагаемого алгоритма
– целесообразность установки КП
непосредственно на кустах скважин с
максимальным количеством датчиков.
Очевидно, что для двух кустов скважин
установка КП на одном из них (с большим
количеством датчиков) и подключение к
нему датчиков «меньшего» куста эффективнее
расположения КП в любой другой точке
координатной плоскости. Для трех и более
кустов размещение КП непосредственно
кусте с максимальным количеством
датчиков не всегда является наиболее
эффективным, но возможные потери мы
считаем пренебрежимо малыми.
Следовательно,
мы совмещаем множества I и J,
т.е. рассматриваем в качестве возможных
мест установки КП только непосредственно
кусты скважин. При этом в качестве
исходных данных требуется задать на
координатной плоскости только множество J,
матрица расстояний ||L|| будет
вычислена автоматически.
Схема
алгоритма следующая:
Шаг
1. Из
всех кустов скважин, еще не подключенных
ни к какому КП (множества J’, упорядоченного
по количеству датчиков, |J’|
=k),
выбираем имеющий максимальное
количество amax = a1.
Этому первому элементу J’ соответствуют
индексы ![]() .
«Устанавливаем»
новое КП, «подключаем» к нему куст
скважин (т.е. устанавливаем xi* =
1, yi*j* =
1).
Шаг
2. Рассчитываем
возможность подключения дополнительных
датчиков к этому КП – использования
оставшихся незанятыми R –amax каналов
ввода, в качестве критерия выбора кустов
для подключения используем минимум
стоимости кабелей (5), при ограничении
на общее количество подключений (6).
Также считаем заведомо нецелесообразным
подключение тех кустов скважин, для
которых стоимость кабельных проводок
превышает стоимость нового КП (7).
Тогда,
при фиксированном i*,
введем переменную zj,
такую, что:
.
«Устанавливаем»
новое КП, «подключаем» к нему куст
скважин (т.е. устанавливаем xi* =
1, yi*j* =
1).
Шаг
2. Рассчитываем
возможность подключения дополнительных
датчиков к этому КП – использования
оставшихся незанятыми R –amax каналов
ввода, в качестве критерия выбора кустов
для подключения используем минимум
стоимости кабелей (5), при ограничении
на общее количество подключений (6).
Также считаем заведомо нецелесообразным
подключение тех кустов скважин, для
которых стоимость кабельных проводок
превышает стоимость нового КП (7).
Тогда,
при фиксированном i*,
введем переменную zj,
такую, что:
 Очевидно,
что z1 =
1.
Тогда на данном шаге нам нужно найти
решение функции:
Очевидно,
что z1 =
1.
Тогда на данном шаге нам нужно найти
решение функции:
|
|
(5) |
При том, что:
|
|
(6) |
|
|
(7) |
|
|
(8) |
Аналогично
приближенному решению задачи о наполнении
булевского ранца [Сигал02], мы последовательно
выбираем j по
минимуму ![]() ,
пока добавление следующей группы
датчиков не приведет к выходу за
ограничение (6).
^ Шаг
3. Оцениваем
эффективность подобного подключения.
Определяем общую стоимость D1 требуемых
кабельных проводок. Если она превышает
стоимость КП, равную с,
то выполняем шаг 3.1. Иначе фиксируем
подключение выбранных кустов скважин
к данному КП (для каждого zj =
1 находим
соответствующий
,
пока добавление следующей группы
датчиков не приведет к выходу за
ограничение (6).
^ Шаг
3. Оцениваем
эффективность подобного подключения.
Определяем общую стоимость D1 требуемых
кабельных проводок. Если она превышает
стоимость КП, равную с,
то выполняем шаг 3.1. Иначе фиксируем
подключение выбранных кустов скважин
к данному КП (для каждого zj =
1 находим
соответствующий ![]() ,
устанавливаем yi*j* = 1).
Шаг
3.1. Для
всех zj =
1, j =
2..k (подмножества J’’ условно
подключаемых кустов скважин) условно
устанавливаем новое КП на кусте с
максимальным из aj,
вычисляем стоимость подключения D2 всех
остальных кустов к нему. Сравниваем две
полученные стоимости. Если D1 < D2 + c,
то подключаем все датчики к исходному
КП на кусте i*,
иначе считаем целесообразным установку
нового КП и подключение оставшихся
датчиков из множества J’’ к
нему.
Шаг
4. Если
есть неподключенные кусты скважин,
перейти к шагу 1, иначе произвести расчет
общей стоимости оборудования и кабельных
проводок, вывести результаты.
Составление
множества допустимых вариантов
подключений производится варьированием
максимального количества входных
каналов контроллера (с оптимизацией
общей суммы затрат на телемеханизацию
вследствие изменения как стоимости
подключения, так и цены КП).
,
устанавливаем yi*j* = 1).
Шаг
3.1. Для
всех zj =
1, j =
2..k (подмножества J’’ условно
подключаемых кустов скважин) условно
устанавливаем новое КП на кусте с
максимальным из aj,
вычисляем стоимость подключения D2 всех
остальных кустов к нему. Сравниваем две
полученные стоимости. Если D1 < D2 + c,
то подключаем все датчики к исходному
КП на кусте i*,
иначе считаем целесообразным установку
нового КП и подключение оставшихся
датчиков из множества J’’ к
нему.
Шаг
4. Если
есть неподключенные кусты скважин,
перейти к шагу 1, иначе произвести расчет
общей стоимости оборудования и кабельных
проводок, вывести результаты.
Составление
множества допустимых вариантов
подключений производится варьированием
максимального количества входных
каналов контроллера (с оптимизацией
общей суммы затрат на телемеханизацию
вследствие изменения как стоимости
подключения, так и цены КП).